 KUKA機器人吸盤真空閥的使用
KUKA機器人吸盤真空閥的使用

機器人程序:
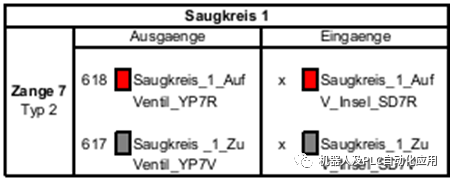
F17-F22 對應控制吸盤1-6 用于控制吸盤的開關
M63,M64-M68 吸盤狀態檢測
A/E617-628吸盤
鉗工具:
SPS MAKRO342 夾抓/吸盤打開
SPS MAKRO343 夾抓/吸盤關閉
SPS MAKRO340 關閉閥控制
F53 關閉吸盤吸氣后,不使用關閉吹氣,-用于一體閥
F54 是否自動關閉反向吹氣的真空閥
F55 第3個閥導的開啟先導閥
F56 第2個閥導的開啟先導閥
F57 用第1閥導的開啟先導閥
F523-帶先導閥-
F524-不帶先導閥-
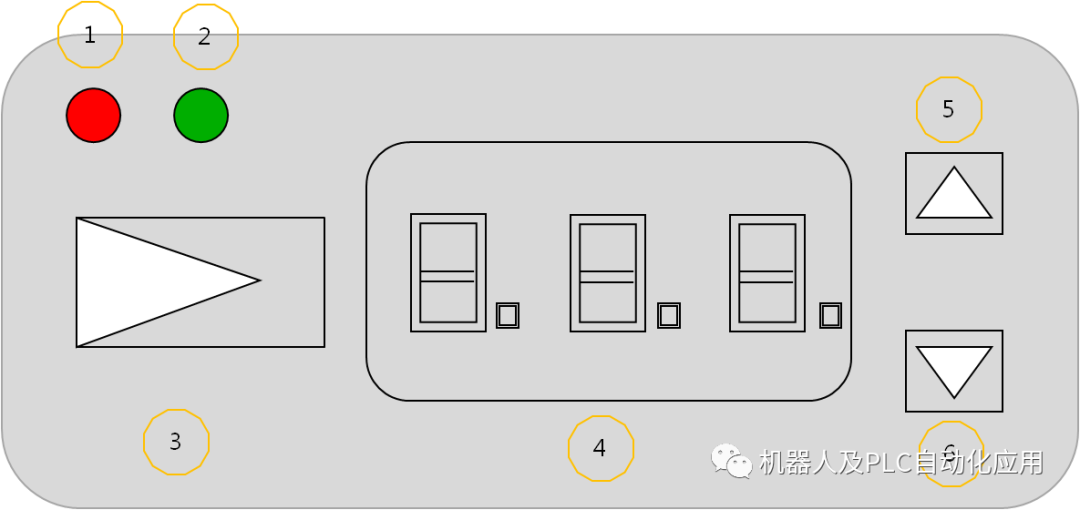
顯示介紹:
1、Output1,LED顯示紅色。
2、Output2,LED顯示綠色。
3、Mode按鍵,用于選擇不同的調整程序。
4、數碼管顯示,測量模式時,顯示真空閥真空狀態,調整參數時顯示不同的選項。
5、Up按鍵,調整數值。
6、Down按鍵,調整數值。
鎖屏和開鎖


開鎖和鎖屏都是用一樣的鍵.Lo C /U n C
1、按住“Mode”鍵再按“Up”鍵,出現“out1”及“no”,用“↑↓”鍵選擇out1是常開還是常閉,并用“Mode”鍵確認。
工作模式:
1、滯后模式(HyS): 以Out1,NO為例,H:關斷值 ;h:滯后值 當真空閥內的負壓達到H時,真空閥Out1輸出1,直到真空閥內壓力減小到h,真空閥Out1輸出0。( 負壓力
2、比較模式(CnP): 以Out2,NO為例,A:基礎值 ;b:峰值 當真空閥內的負壓達到A且小于b時,真空閥OUT2輸出1,其他壓力時Out2為0。( 負壓力
Out1工作模式選擇:
1、 按“Mode”鍵2次,數碼管顯示“2”,等待2秒后“Out1”及其工作方式(默認是HyS)交替顯示,通過“Up”和“Down”鍵來選擇工作方式,并用“Mode”鍵確認。
2、 按“Mode”鍵4次,數碼管顯示“4”,等待2秒后“Out2”及其工作方式(默認是HyS)交替顯示,通過“Up”和“Down”鍵來選擇工作方式,并用“Mode”鍵確認。
審核編輯 :李倩


-
led
+關注
關注
242文章
23840瀏覽量
673944 -
機器人
+關注
關注
213文章
29730瀏覽量
212828 -
數碼管
+關注
關注
32文章
1889瀏覽量
92586
原文標題:KUKA機器人吸盤真空閥的使用
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄






 工商網監
工商網監
評論