") 使用Jetson Xavier NX 開發(fā)者工具包部署AI應(yīng)用程序
使用Jetson Xavier NX 開發(fā)者工具包部署AI應(yīng)用程序

現(xiàn)代對敏捷能力和零停機(jī)時(shí)間持續(xù)創(chuàng)新的期望要求改變嵌入式和邊緣設(shè)備軟件的開發(fā)和部署方式。在邊緣采用諸如微服務(wù)、容器化和容器編排之類的云原生范式是前進(jìn)的方向,但是部署、管理和安全問題的復(fù)雜性阻礙了擴(kuò)展。
NVIDIA EGX 平臺是一個(gè)基于云的 Kubernetes 和基于容器的軟件平臺,使您能夠快速、輕松地為基于 NVIDIA Jetson 的微服務(wù)器或邊緣物聯(lián)網(wǎng)系統(tǒng)提供資源。通過為 Jetson Xavier NX 邊緣設(shè)備帶來 EGX 云本地敏捷性,企業(yè)可以使用與云革命相同的技術(shù)和工作流來大規(guī)模構(gòu)建、部署和管理邊緣設(shè)備。
在本文中,您將了解云原生軟件棧的關(guān)鍵組件,如何在 Jetson Xavier NX 開發(fā)者工具包上安裝 EGX DIY 堆棧,并使用它在邊緣輕松部署智能視頻分析( IVA )應(yīng)用程序。
人工智能容器
如今的企業(yè)正在將智能轉(zhuǎn)移到邊緣,并在地理位置不同的存在點(diǎn)( POP )部署邊緣基礎(chǔ)設(shè)施,以實(shí)現(xiàn)更低的網(wǎng)絡(luò)成本和更好的響應(yīng)時(shí)間。容器是敏捷軟件開發(fā)和交付的促成因素,并節(jié)省帶寬以幫助降低傳輸成本。
EGX 從 NGC 運(yùn)行 AI 容器,這是一個(gè)為 AI 和數(shù)據(jù)分析軟件優(yōu)化的集線器。 NGC 旨在簡化和加速端到端工作流。 NGC 擁有 150 多個(gè)企業(yè)級容器, 100 多個(gè)模型,以及行業(yè)特定的 sdk 和 Helm 圖表,可以部署在本地、云中或邊緣。您可以按原樣使用軟件或“優(yōu)化和定制”,使部署功能強(qiáng)大的軟件或構(gòu)建定制的解決方案變得容易,并收集見解以實(shí)現(xiàn)業(yè)務(wù)價(jià)值。
EGX 還包括對 NGC 私人注冊 的訪問,在這里您可以安全地存儲您獨(dú)特的 IP 和定制的解決方案,以最大的安全性在邊緣、本地或云上共享和部署。
庫伯涅茨
Kubernetes 是一個(gè)容器編排系統(tǒng),是當(dāng)今云計(jì)算和企業(yè)中最活躍的開源項(xiàng)目之一。它已經(jīng)成為阿德事實(shí)標(biāo)準(zhǔn)和邊緣計(jì)算的重要基礎(chǔ),具有自動容器部署和自我修復(fù)的特性。
EGX 云本地軟件策略的一個(gè)核心組件是使 GPUs 具有 Kubernetes 的彈性。 EGX 包括一個(gè) GPU 操作符,它自動安裝和配置 Kubernetes 集群中使用 GPUs 所需的所有組件。
這大大簡化了第 0 天的 IT 操作,并完全自動化了第 1 天的操作… n 操作。所有必需的組件,如 NVIDIA 驅(qū)動程序、 NVIDIA 容器運(yùn)行時(shí)、 Kubernetes 設(shè)備插件和監(jiān)控都是容器化的,并作為服務(wù)在 Kubernetes 上運(yùn)行,這導(dǎo)致 IT 部門只需為 CPU 和 GPU 節(jié)點(diǎn)管理一個(gè)映像。
舵面圖
Helm 圖表是 Kubernetes 推薦的包格式,因?yàn)樗试S您通過單擊按鈕和幾個(gè) CLI 命令在 Kubernetes 集群上輕松地配置、部署和更新應(yīng)用程序。
NGC 托管這些庫伯內(nèi)特斯準(zhǔn)備好的頭盔圖表來部署強(qiáng)大的第三方軟件。 DevOps 還可以在 NGC 上推送和共享他們的舵圖,這樣團(tuán)隊(duì)就可以利用一致、安全和可靠的環(huán)境來加快開發(fā)到生產(chǎn)周期。
安裝 EGX 2.0 堆棧
NVIDIA Jetson Xavier NX 開發(fā)工具包 將超級計(jì)算機(jī)的性能提升到了極致,在 15W 的功率和較小的外形尺寸下,提供了 21 個(gè)頂級的 AI 計(jì)算。 Jetson Xavier NX 非常適合高性能人工智能系統(tǒng),如商業(yè)機(jī)器人、醫(yī)療器械、智能相機(jī)、高分辨率傳感器、自動光學(xué)檢測、智能工廠和其他物聯(lián)網(wǎng)嵌入式系統(tǒng)。
對 Jetson Xavier NX 的云本地支持現(xiàn)在也可以通過 EGX 軟件棧的最新更新實(shí)現(xiàn)。 Jetson Xavier NX 開發(fā)工具包上的這個(gè)堆棧是 NVIDIA 功能和性能驗(yàn)證的參考設(shè)計(jì),可以在嵌入式設(shè)備上實(shí)現(xiàn)快速的云本地部署。
下面是在 Jetson Xavier NX 開發(fā)工具包上安裝 egx2.0 堆棧的步驟。成功安裝后, EGX 2.0 平臺 – 就緒 Jetson Xavier NX 開發(fā)工具包包括以下內(nèi)容:
NVIDIA Jetpack SDK 4.4
管理版本 1.17.5
舵手/舵柄 3.1.0
NVIDIA 容器運(yùn)行時(shí) 1.0.1-dev
在本文中,我們使用了一個(gè)帶有 Jetson Xavier NX 開發(fā)工具包的 32gb microSD 卡。
設(shè)置開發(fā)工具包并安裝 JetPack 4.4
JetPack 包含在 Jetson 平臺上構(gòu)建 AI 應(yīng)用程序的庫、工具和核心操作系統(tǒng)。有關(guān)設(shè)置 Jetson Xavier NX 開發(fā)人員工具包和安裝 Jetpack4.4 的詳細(xì)信息,請參閱 Jetson Xavier NX 開發(fā)工具包入門 。
更新 Docker 配置
編輯 Docker 守護(hù)程序配置,添加以下行并保存文件:
"default-runtime" : "nvidia"
下面是一個(gè)配置塊示例:
$ sudo nano /etc/docker/daemon.json { "runtimes": { "nvidia": { "path": "nvidia-container-runtime", "runtimeArgs": [] } }, "default-runtime" : "nvidia"
}
重新啟動 Docker 守護(hù)程序:
sudo systemctl daemon-reload && sudo systemctl restart docker
正在驗(yàn)證 Docker 默認(rèn)運(yùn)行時(shí)
驗(yàn)證 Docker 默認(rèn)運(yùn)行時(shí)為 NVIDIA :
$ sudo docker info | grep -i runtime
以下是示例輸出:
Runtimes: nvidia runc Default Runtime: nvidia
安裝 Kubernetes 1 .17. 5 版
在開始安裝之前,請確保 Docker 已啟動并已啟用:
$ sudo systemctl start docker && sudo systemctl enable docker
安裝立方體、 kubeadm 和 kubectl :
$ sudo apt-get update && sudo apt-get install -y apt-transport-https curl $ curl -s https://packages.cloud.google.com/apt/doc/apt-key.gpg | sudo apt-key add - $ sudo mkdir -p /etc/apt/sources.list.d/
創(chuàng)建庫伯內(nèi)特斯列表文件:
$ sudo nano /etc/apt/sources.list.d/kubernetes.list
在庫伯內(nèi)特斯列表歸檔并保存:
deb https://apt.kubernetes.io/ kubernetes-xenial main
安裝立方體、 kubectl 和 kubeadm :
$ sudo apt-get update $ sudo apt-get install -y -q kubelet=1.17.5-00 kubectl=1.17.5-00 kubeadm=1.17.5-00 $ sudo apt-mark hold kubelet kubeadm kubectl
初始化 Kubernetes 集群以作為主服務(wù)器運(yùn)行
禁用交換:
$ sudo swapoff -a
初始化群集:
$ sudo kubeadm init --pod-network-cidr=10.244.0.0/16
輸出顯示了將 pod 網(wǎng)絡(luò)部署到集群所需執(zhí)行的命令,以及加入集群的命令。
使用輸出指令,運(yùn)行以下命令:
$ mkdir -p $HOME/.kube $ sudo cp -i /etc/kubernetes/admin.conf $HOME/.kube/config $ sudo chown $(id -u):$(id -g) $HOME/.kube/config
將 pod 網(wǎng)絡(luò)附加組件安裝到控制平面節(jié)點(diǎn)。使用 calico 作為 pod 網(wǎng)絡(luò)附加組件:
$ kubectl apply -f https://raw.githubusercontent.com/coreos/flannel/master/Documentation/kube-flannel.yml
確保所有吊艙都已啟動并運(yùn)行:
$ kubectl get pods --all-namespaces
以下是示例輸出:
NAMESPACE NAME READY STATUS RESTARTS AGE kube-system kube-flannel-ds-arm64-gz28t 1/1 Running 0 2m8s kube-system coredns-5c98db65d4-d4kgh 1/1 Running 0 9m8s kube-system coredns-5c98db65d4-h6x8m 1/1 Running 0 9m8s kube-system etcd-#yourhost 1/1 Running 0 8m25s kube-system kube-apiserver-#yourhost 1/1 Running 0 8m7s kube-system kube-controller-manager-#yourhost 1/1 Running 0 8m3s kube-system kube-proxy-6sh42 1/1 Running 0 9m7s kube-system kube-scheduler-#yourhost 1/1 Running 0 8m26s
get nodes命令顯示主節(jié)點(diǎn)已啟動并準(zhǔn)備就緒:
$ kubectl get nodes
以下是示例輸出:
NAME STATUS ROLES AGE VERSION #yournodes Ready master 10m v1.17.5
因?yàn)槟褂玫氖菃喂?jié)點(diǎn) Kubernetes 集群,所以默認(rèn)情況下,集群無法在控制平面節(jié)點(diǎn)上調(diào)度 pod 。在控制平面節(jié)點(diǎn)上調(diào)度 pods 。必須使用以下命令刪除污點(diǎn):
$ kubectl taint nodes --all node-role.kubernetes.io/master-
安裝舵柄/舵柄 3 .1 . 0
下載 Helm 3 .1.0 :
$ sudo wget https://get.helm.sh/helm-v3.1.0-linux-arm64.tar.gz $ sudo tar -zxvf helm-v3.1.0-linux-arm64.tar.gz $ sudo mv linux-arm64/helm /usr/local/bin/helm
要驗(yàn)證 EGX 堆棧是否按預(yù)期工作,請按照以下步驟創(chuàng)建 pod yaml 文件。如果 getpods 命令顯示 pod 狀態(tài)為 completed ,則說明安裝成功。您還可以驗(yàn)證 CUDA 是否成功運(yùn)行 – 樣品。 yaml 驗(yàn)證輸出是否顯示 Result = PASS 。
創(chuàng)建一個(gè) pod yaml 文件,添加以下內(nèi)容,并將其另存為樣品。 yaml :
$ sudo nano cuda-samples.yaml
添加以下內(nèi)容并將其另存為 CUDA – 樣品. yaml :
apiVersion: v1 kind: Pod metadata: name: nvidia-l4t-base spec: restartPolicy: OnFailure containers: - name: nvidia-l4t-base image: "nvcr.io/nvidia/l4t-base:r32.4.2" args: - /usr/local/cuda/samples/1_Utilities/deviceQuery/deviceQuery
編譯 CUDA 示例以從 pod 驗(yàn)證:
$ cd /usr/local/cuda/samples/1_Utilities/deviceQuery $ sudo make $ cd ~
創(chuàng)建示例 GPU pod :
$ sudo kubectl apply -f cuda-samples.yaml
檢查樣本盒是否已創(chuàng)建:
$ kubectl get pods
以下是示例輸出:
nvidia-l4t-base 0/1 Completed 2m
驗(yàn)證示例 pod 日志以支持 CUDA 庫:
kubectl logs nvidia-l4t-base
以下是示例輸出:
/usr/local/cuda/samples/1_Utilities/deviceQuery/deviceQuery Starting... CUDA Device Query (Runtime API) version (CUDART static linking) Detected 1 CUDA Capable device(s) Device 0: "Xavier" CUDA Driver Version / Runtime Version 10.2 / 10.2 CUDA Capability Major/Minor version number: 7.2 Total amount of global memory: 7764 MBytes (8140709888 bytes) ( 6) Multiprocessors, ( 64) CUDA Cores/MP: 384 CUDA Cores GPU Max Clock rate: 1109 MHz (1.11 GHz) Memory Clock rate: 1109 Mhz Memory Bus Width: 256-bit L2 Cache Size: 524288 bytes Maximum Texture Dimension Size (x,y,z) 1D=(131072), 2D=(131072, 65536), 3D=(16384, 16384, 16384) Maximum Layered 1D Texture Size, (num) layers 1D=(32768), 2048 layers Maximum Layered 2D Texture Size, (num) layers 2D=(32768, 32768), 2048 layers Total amount of constant memory: 65536 bytes Total amount of shared memory per block: 49152 bytes Total number of registers available per block: 65536 Warp size: 32 Maximum number of threads per multiprocessor: 2048 Maximum number of threads per block: 1024 Max dimension size of a thread block (x,y,z): (1024, 1024, 64) Max dimension size of a grid size (x,y,z): (2147483647, 65535, 65535) Maximum memory pitch: 2147483647 bytes Texture alignment: 512 bytes Concurrent copy and kernel execution: Yes with 1 copy engine(s) Run time limit on kernels: No Integrated GPU sharing Host Memory: Yes Support host page-locked memory mapping: Yes Alignment requirement for Surfaces: Yes Device has ECC support: Disabled Device supports Unified Addressing (UVA): Yes Device supports Compute Preemption: Yes Supports Cooperative Kernel Launch: Yes Supports MultiDevice Co-op Kernel Launch: Yes Device PCI Domain ID / Bus ID / location ID: 0 / 0 / 0 Compute Mode: < Default (multiple host threads can use ::cudaSetDevice() with device simultaneously) > deviceQuery, CUDA Driver = CUDART, CUDA Driver Version = 10.2, CUDA Runtime Version = 10.2, NumDevs = 1 Result = PASS
有關(guān) EGX 軟件版本和安裝指南的更多信息,請參閱Jetson Xavier NX DevKit 的 EGX Stack – v2 . 0 安裝指南。
用例:簡化 IVA 應(yīng)用程序的部署
在基于 EGX 的 Jetson Xavier NX 上使用NVIDIA 深溪構(gòu)建和部署 AI 驅(qū)動的 IVA 應(yīng)用程序和服務(wù)。 deepstreamsdk 提供了一個(gè)具有 TLS 安全性的可擴(kuò)展加速框架,可以部署在邊緣并連接到任何云。
在您的 EGX Jetson 設(shè)備上創(chuàng)建一個(gè) DeepStream Helm 圖表目錄。
$ mkdir deepstream-helmchart
在/ deepstream helmchart 中創(chuàng)建一個(gè)模板目錄來存儲 Kubernetes 清單:
$ mkdir -p deepstream-helmchart/templates
創(chuàng)建圖表. yaml 文件,添加以下內(nèi)容,并將其保存到/ deepstream helmchart 目錄中:
$ nano chart.yaml apiVersion: v1 name: deepstream-helmchart version: 1.0.0 appVersion: 0.1
將新文件創(chuàng)建為配置映射. yaml 在/ deepstream helmchart / templates 中添加以下內(nèi)容:
$ nano configmap.yaml apiVersion: v1 kind: ConfigMap metadata: name: deepstream-configmap data: source4_1080p_dec_infer-resnet_tracker_sgie_tiled_display_int8.txt: |- # Copyright (c) 2018 NVIDIA Corporation. All rights reserved. # # NVIDIA Corporation and its licensors retain all intellectual property # and proprietary rights in and to this software, related documentation # and any modifications thereto. Any use, reproduction, disclosure or # distribution of this software and related documentation without an express # license agreement from NVIDIA Corporation is strictly prohibited. [application] enable-perf-measurement=1 perf-measurement-interval-sec=5 #gie-kitti-output-dir=streamscl [tiled-display] enable=1 rows=2 columns=2 width=1280 height=720 gpu-id=0 #(0): nvbuf-mem-default - Default memory allocated, specific to a platform #(1): nvbuf-mem-cuda-pinned - Allocate Pinned/Host cuda memory, applicable for Tesla #(2): nvbuf-mem-cuda-device - Allocate Device cuda memory, applicable for Tesla #(3): nvbuf-mem-cuda-unified - Allocate Unified cuda memory, applicable for Tesla #(4): nvbuf-mem-surface-array - Allocate Surface Array memory, applicable for Jetson nvbuf-memory-type=0 [source0] enable=1 #Type - 1=CameraV4L2 2=URI 3=MultiURI 4=RTSP type=3 uri=file://../../streams/sample_1080p_h264.mp4 num-sources=4 #drop-frame-interval =2 gpu-id=0 # (0): memtype_device - Memory type Device # (1): memtype_pinned - Memory type Host Pinned # (2): memtype_unified - Memory type Unified cudadec-memtype=0 [sink0] enable=1 type=1 sync=0 codec=1 bitrate=4000000 rtsp-port=8554 udp-port=5400 gpu-id=0 nvbuf-memory-type=0 [sink1] enable=0 type=3 #1=mp4 2=mkv container=1 #1=h264 2=h265 codec=3 sync=0 bitrate=2000000 output-file=out.mp4 source-id=0 gpu-id=0 [sink2] enable=0 #Type - 1=FakeSink 2=EglSink 3=File 4=RTSPStreaming type=4 #1=h264 2=h265 codec=1 sync=1 bitrate=1000000 cuda-memory-type=1 # set below properties in case of RTSPStreaming rtsp-port=8554 udp-port=5400 gpu-id=0 [osd] enable=1 gpu-id=0 border-width=1 text-size=15 text-color=1;1;1;1; text-bg-color=0.3;0.3;0.3;1 font=Serif show-clock=0 clock-x-offset=800 clock-y-offset=820 clock-text-size=12 clock-color=1;0;0;0 nvbuf-memory-type=0 [streammux] gpu-id=0 ##Boolean property to inform muxer that sources are live live-source=0 batch-size=4 ##time out in usec, to wait after the first buffer is available ##to push the batch even if the complete batch is not formed batched-push-timeout=40000 ## Set muxer output width and height width=1920 height=1080 ##Enable to maintain aspect ratio wrt source, and allow black borders, works ##along with width, height properties enable-padding=0 nvbuf-memory-type=0 # config-file property is mandatory for any gie section. # Other properties are optional and if set will override the properties set in # the infer config file. [primary-gie] enable=1 gpu-id=0 model-engine-file=../../models/Primary_Detector/resnet10.caffemodel_b4_int8.engine batch-size=4 bbox-border-color0=1;0;0;1 bbox-border-color1=0;1;1;1 bbox-border-color2=0;0;1;1 bbox-border-color3=0;1;0;1 interval=0 gie-unique-id=1 nvbuf-memory-type=0 config-file=config_infer_primary.txt [tracker] enable=1 tracker-width=640 tracker-height=384 ll-lib-file=/opt/nvidia/deepstream/deepstream-5.0/lib/libnvds_mot_iou.so #ll-lib-file=/opt/nvidia/deepstream/deepstream-4.0/lib/libnvds_nvdcf.so ll-lib-file=/opt/nvidia/deepstream/deepstream-5.0/lib/libnvds_mot_klt.so #ll-config-file required for DCF/IOU only #ll-config-file=tracker_config.yml #ll-config-file=iou_config.txt gpu-id=0 #enable-batch-process applicable to DCF only enable-batch-process=1 [secondary-gie0] enable=1 model-engine-file=../../models/Secondary_VehicleTypes/resnet18.caffemodel_b16_int8.engine gpu-id=0 batch-size=16 gie-unique-id=4 operate-on-gie-id=1 operate-on-class-ids=0; config-file=config_infer_secondary_vehicletypes.txt [secondary-gie1] enable=1 model-engine-file=../../models/Secondary_CarColor/resnet18.caffemodel_b16_int8.engine batch-size=16 gpu-id=0 gie-unique-id=5 operate-on-gie-id=1 operate-on-class-ids=0; config-file=config_infer_secondary_carcolor.txt [secondary-gie2] enable=1 model-engine-file=../../models/Secondary_CarMake/resnet18.caffemodel_b16_int8.engine batch-size=16 gpu-id=0 gie-unique-id=6 operate-on-gie-id=1 operate-on-class-ids=0; config-file=config_infer_secondary_carmake.txt [tests] file-loop=1
設(shè)置電源模式并固定 Jetson 設(shè)備上的時(shí)鐘:
$ sudo nvpmodel -m 2 $ sudo jetson_clocks
在 Jetson 設(shè)備上安裝 DeepStream 頭盔圖表:
$ helm install --name-template deepstream deepstream-helmchart/
驗(yàn)證 DeepStream 吊艙是否啟動并運(yùn)行:
$ kubectl get pods NAME READY STATUS RESTARTS AGE deepstream-76787ffbf7-mfwk7 1/1 Running 0 1m
查看 DeepStream 吊艙日志并查看性能:
$ kubectl logs
以下是示例輸出:
$ kubectl logs deepstream-9f8b6b68d-rc5lq **PERF: 101.42 (100.29) 101.42 (100.29) 101.42 (100.29) 101.42 (100.29)
清理 Jetson 設(shè)備上的 DeepStream 頭盔圖表:
$ helm del deepstream
結(jié)論
在本文中,您了解了云原生軟件棧的關(guān)鍵組件。我們還向您展示了如何在 Jetson Xavier NX 開發(fā)工具包上安裝 EGX DIY 堆棧。使用它可以輕松地在邊緣部署 IVA 應(yīng)用程序。
要了解其他 Jetson Xavier NX 支持的集裝箱化、預(yù)先訓(xùn)練的 AI 模型的更多信息,請參見 NGC 。這些模型可以作為您的人工智能應(yīng)用程序開發(fā)的構(gòu)建塊,并幫助您在今天的邊緣計(jì)算中實(shí)現(xiàn)下一個(gè)飛躍!
關(guān)于作者
Ankita Sharma 是 NVIDIA 的產(chǎn)品營銷經(jīng)理,幫助客戶構(gòu)建基于 EGX 的高性能企業(yè)和邊緣推理解決方案。她在 GTM 執(zhí)行云、網(wǎng)絡(luò)和人工智能解決方案方面擁有多年的經(jīng)驗(yàn)。
審核編輯:郭婷
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29697瀏覽量
212602 -
NVIDIA
+關(guān)注
關(guān)注
14文章
5299瀏覽量
106265 -
AI
+關(guān)注
關(guān)注
88文章
35008瀏覽量
278757
發(fā)布評論請先 登錄
Java開發(fā)者必備的效率工具——Perforce JRebel是什么?為什么很多Java開發(fā)者在用?

首創(chuàng)開源架構(gòu),天璣AI開發(fā)套件讓端側(cè)AI模型接入得心應(yīng)手
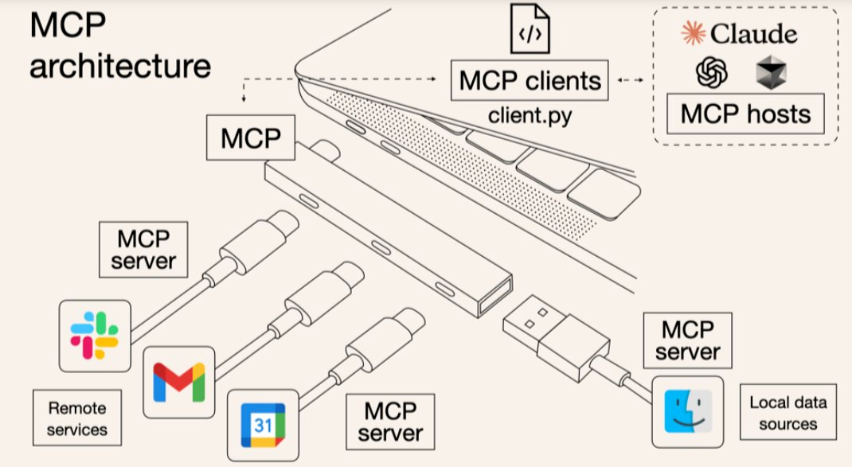
MCP:連接AI與應(yīng)用程序的開放標(biāo)準(zhǔn)!
極速部署!GpuGeek提供AI開發(fā)者的云端GPU最優(yōu)解

如何部署OpenVINO?工具套件應(yīng)用程序?
云端AI開發(fā)者工具的核心功能
云計(jì)算開發(fā)工具包的功能
2024年AI開發(fā)者中間件工具生態(tài)全面總結(jié)
AI開發(fā)平臺如何賦能開發(fā)者
最新Simplicity SDK軟件開發(fā)工具包發(fā)布
NVIDIA Jetson Orin Nano開發(fā)者套件的新功能
NVIDIA發(fā)布小巧高性價(jià)比的Jetson Orin Nano Super開發(fā)者套件
云端AI開發(fā)者工具怎么用
Arm推出GitHub平臺AI工具,簡化開發(fā)者AI應(yīng)用開發(fā)部署流程
涂鴉引領(lǐng)云開發(fā)AI浪潮,實(shí)用給力的三大開發(fā)者工具全新發(fā)布!

- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測量儀表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無線
- 接口/總線/驅(qū)動
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識
- 工具箱
- VIP會員
- 最新技術(shù)文章
- 產(chǎn)品地圖
- 品牌地圖
- 供應(yīng)鏈服務(wù)
- 硬件開發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會
- 活動策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測驗(yàn)
- 設(shè)計(jì)大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內(nèi)容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區(qū)合作
- 劉勇:liuyong@huaqiu.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟(jì)技術(shù)開發(fā)區(qū)航空路6號手機(jī)智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
評論