 低速自動駕駛的應用場景和發展
低速自動駕駛的應用場景和發展

自動駕駛技術的發展并不如我們所預想的那么順利,無論是自動駕駛的發展模式(單車智能or智能網聯),還是自動駕駛的技術升級(激光雷達、毫米波雷達、深度學習等),亦或是自動駕駛的相關法律法規制定,都沒有形成一個完善的且可以足夠商用化應用的體系,消費者想要在日常生活中享受到自動駕駛服務的日子還有很長一段路要走。但隨著自動駕駛技術的提升,很多自動駕駛概念已經被使用且和我們日常生活息息相關的產品都看到了自動駕駛的影子,并服務于我們日常的生活當中,這就是低速自動駕駛。
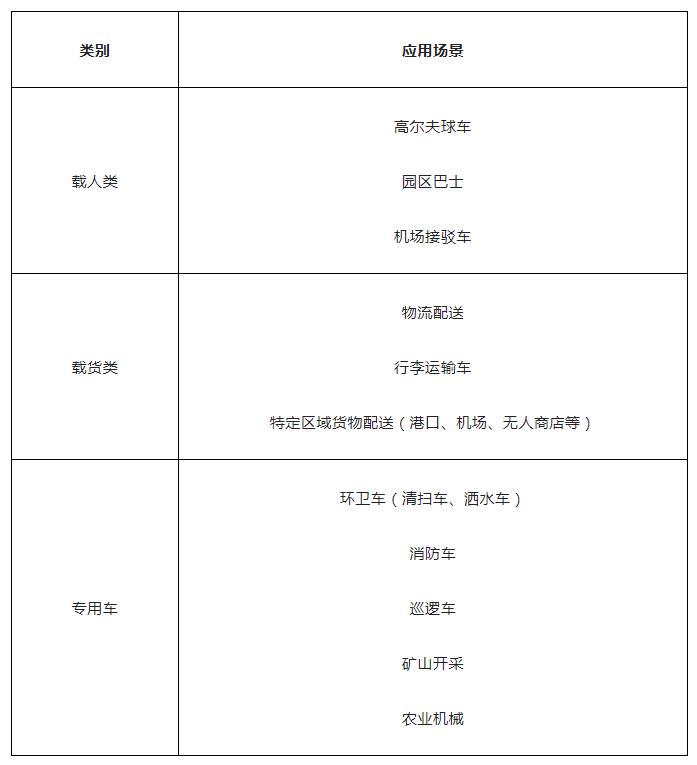
低速自動駕駛就是指應用場景相對簡單固定,時速低于50 km/h的自動駕駛汽車,低速自動駕駛也被稱之為低速無人駕駛,在很多園區、校園看到的自動快遞運輸車就是屬于這一范疇,低速自動駕駛的應用區域包括校園、景區、園區、機場、礦山等,根據類別可以分為載人類、載貨類和專用車類等,可以使用的范圍包括特定區域的物流配送、礦山開采、無人機農用機械、餐飲及零售等,低速自動駕駛技術多使用在運輸貨物上,但在部分使用場景中也可以用來載人,如高爾夫球車、園區巴士、機場接駁車等。據了解保守估計,包含低速載人無人車、低速載貨無人車,無人作業車在內,2021年中國低速自動駕駛車銷量達2.5萬臺,2022年將達10.4萬臺,低速自動駕駛將成為我們日常生活中的一部分。
低速自動駕駛的應用場景很多且已經相對成熟,如前文提到的自動快遞運輸車,我國社會物流總費用居高不下,除了經濟結構、產業布局、發展階段等客觀因素外,各種運輸方式缺乏合理分工、物流路徑不夠優化、貨物多次裝卸搬運也使得物流環節過多,從而推高了物流成本。此外,隨著物流產業進入每日億件包裹的時代,傳統人工作業已無法更好滿足日益增長的需求,簡而言之就是物流運輸成本之高,快遞數量之多,運輸方式不合理且現在很多快遞都會直接放置到快遞柜,無法直接交給用戶等問題一直存在,自動快遞運輸車的出現,就很好的解決了這個問題,自動快遞運輸車的出現,可以減少派送員的派送時間,解決了派送員最后100 m的配送難題,自動快遞運輸車可以直接將快遞送到用戶家門口,且用戶可以通過手機端操作,告知派送時間,讓自動駕駛運輸車可以優化運送路線。
類似于自動駕駛運輸車等技術的低速無人駕駛的使用已經相當普遍,在其產品上,涉及了很多的自動駕駛技術,比如每輛低速自動駕駛車輛上都融合了硬件、軟件、算法和通信等多種技術,如自動駕駛所需的激光雷達、毫米波雷達、衛星定位、慣導模塊等硬件設備及感知、定位、規劃、控制、數據存儲、仿真等技術都得到了應用,包括汽車工業鏈中的線控底盤技術都在低速駕駛車輛上進行了普及。
2021年10月29日在深圳召開的2021自動駕駛低速無人車商業應用標準發布會上,由深圳市智能交通行業協會和低速無人車領域企業、專家共同編制的《低速無人車城市商業運營安全管理規范》團體標準正式實施。這是一部專為低速自動駕駛應用所編制等首創性標準,具有一定的先進性和創新性,將對低速自動駕駛投放使用起到重要的指導作用。
隨著低速自動駕駛管理規范的制定及相關技術的提升,低速自動駕駛也將會更多地進入我們日常生活,但低速自動駕駛與我們心目中所預期的自動駕駛技術并不相同,低速自動駕駛依舊是自動駕駛的早期形態,在前文提及低速自動駕駛的概念中提出,低速自動駕駛是時速低于50 km/h,即低速自動駕駛車輛的運行速度是很低的,其致死率、破壞性也比較低,速度也遠遠達不到載人在城市道路上運行的要求。其次就是低速自動駕駛車輛的應用范圍多在園區或規定的區域,限定的環境就意味著未知的干擾的可能性極低,系統的硬件成本和軟件開發成本也會大大降低,當將低速自動駕駛車輛從平時工作的區域放置到另一個新的場景后,將無法被使用,這也是與我們心目中自動駕駛區別最大的一個因素,但也正因為其低速和限定范圍等因素,讓低速自動駕駛汽車在技術實現和商業落地上具有很大的優勢。
最后和大家來聊聊自動駕駛的發展,最近在與一位大拿聊天時探討了相關的話題,現在無論是低速自動駕駛,還是在部分地區投放的自動駕駛載人出租,都有一個共同的問題,即場景使用的局限性,當在這一地區投放的自動駕駛車輛或低速自動駕駛車輛,投放前期要做的一件事就是將該地的道路信息進行全面的掃描,之后才可以進行應用,當道路信息變換或進入一個新的場景后,就需要對道路信息進行新一輪的掃描。這樣的發展模式就像是教小朋友走路一樣,有一個東西扶持著走路,小朋友只需要會走即可,簡而言之就是現在的自動駕駛發展模式讓自動駕駛汽車并不智能,只是在部分場景下的自動駕駛。如果一直依照這樣的發展模式,在自動駕駛落地后將需要花費大量的人力、財力,如車輛投放具有范圍的限制性,只能在規定區域行駛,道路進行修繕后,需要立刻完成相關區域的道路信息掃描。
如果想要真正實現自動駕駛商用化,就需要教會自動駕駛汽車和人類一樣辨別道路,識別路況,完成自動駕駛,而這一步恰是最難的,無論是通過智能網聯的發展模式,讓道路信息和車輛信息實現共享互通,還是通過將單車智能做到極致化,讓自動駕駛汽車實現人類一樣的辨別能力,都是實現自動駕駛不可避免的一步,授人以魚,不如授人以漁,教會自動駕駛汽車看路、識路,比教會自動駕駛汽車走路更為重要,這也是影響自動駕駛技術急需突破的難點,關于自動駕駛和低速自動駕駛,大家怎么看?歡迎關注智駕最前沿,留言交流。
-
自動駕駛
+關注
關注
789文章
14321瀏覽量
170639 -
智能網聯汽車
+關注
關注
9文章
1160瀏覽量
31533
發布評論請先 登錄
低速自動駕駛與乘用車自動駕駛在技術要求上有何不同?

卡車、礦車的自動駕駛和乘用車的自動駕駛在技術要求上有何不同?

小馬智行助力公路干線物流自動駕駛發展
自動駕駛安全基石:ODD
新能源車軟件單元測試深度解析:自動駕駛系統視角

AK2超聲波雷達:自動駕駛低速巡航的精準感知來源

一文聊聊自動駕駛測試技術的挑戰與創新


汽車雷達回波發生器的技術原理和應用場景
基于場景的自動駕駛驗證策略







 工商網監
工商網監
評論