 基于STM32設計的健康檢測設備(測溫心率計步)
基于STM32設計的健康檢測設備(測溫心率計步)
1. 項目介紹
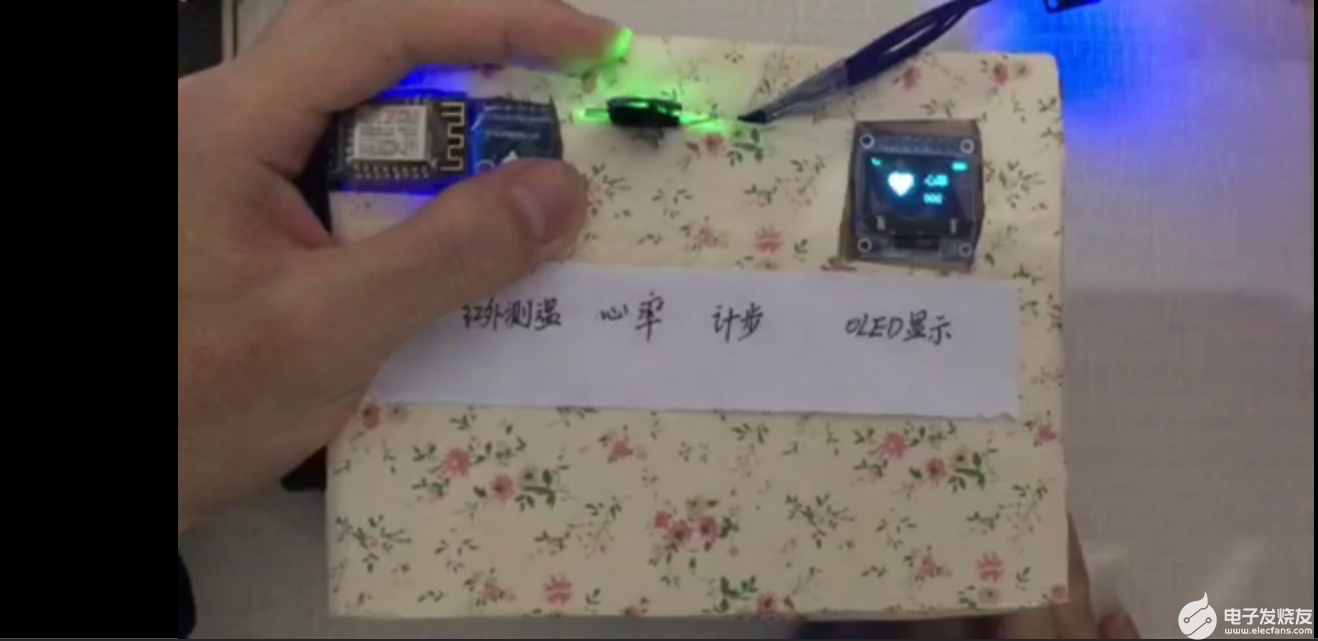
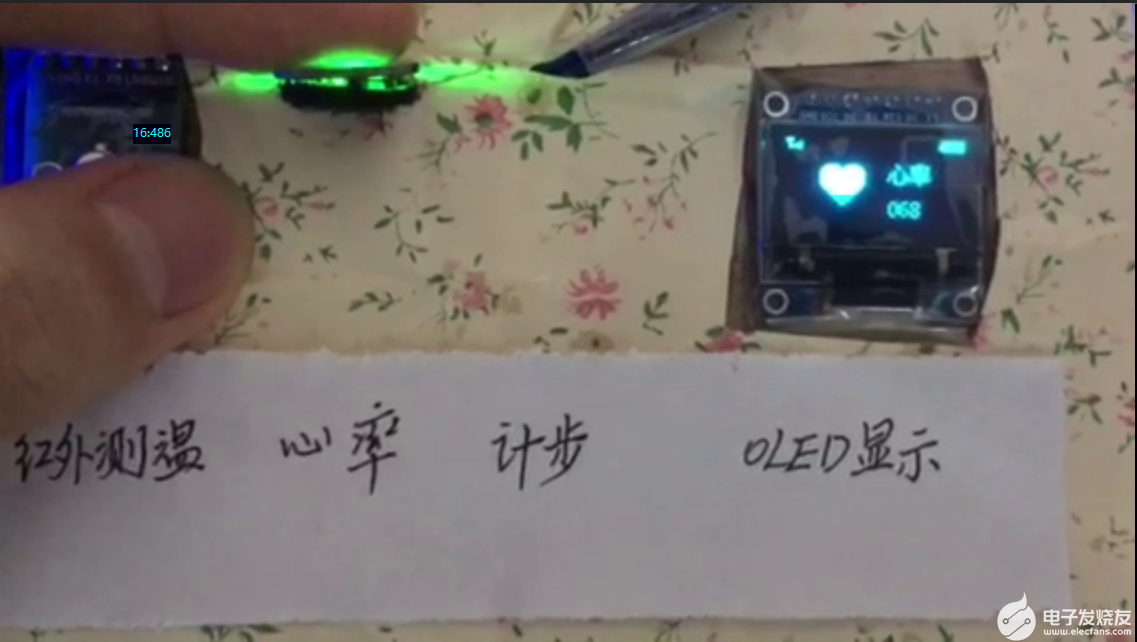
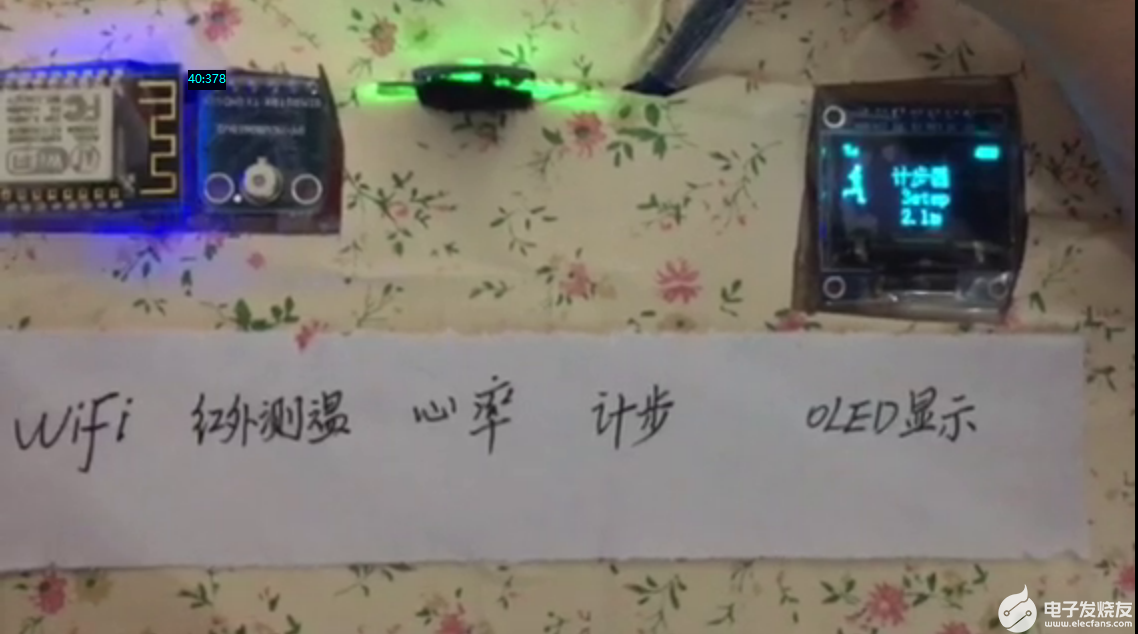
本文介紹的項目是基于STM32設計的健康檢測設備,支持體溫測量,心率檢測,支持運動計步(采用MPU6050陀螺儀實現),支持WIFI傳輸數據到手機APP打印顯示。
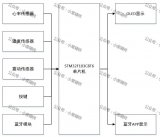
硬件環境介紹:
MCU采用STM32F103C8T6
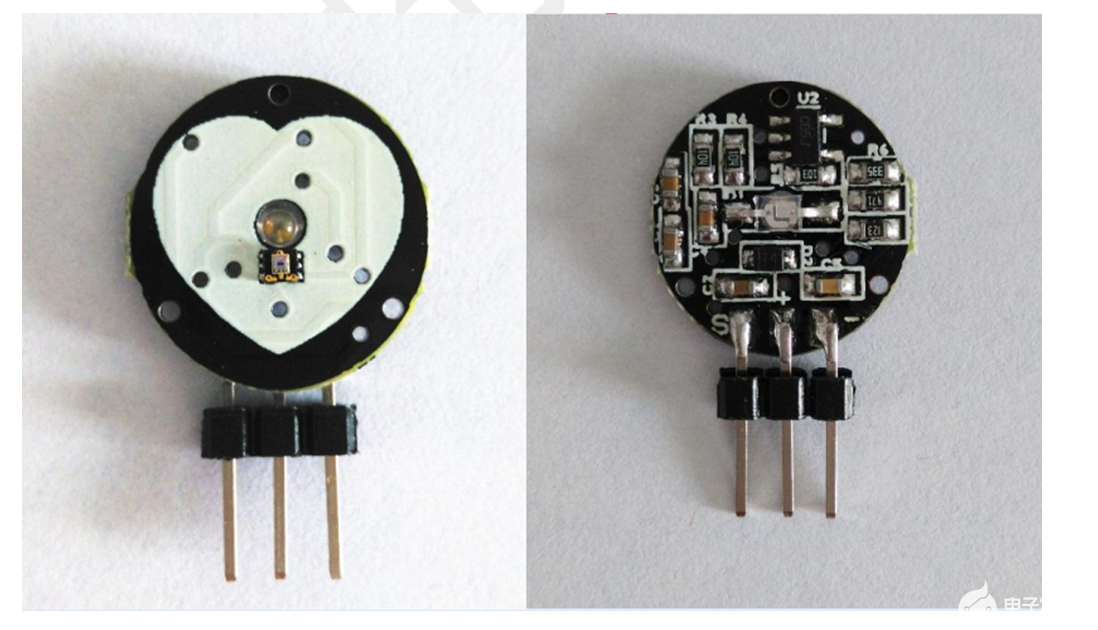
心率傳感器采用PulseSensor
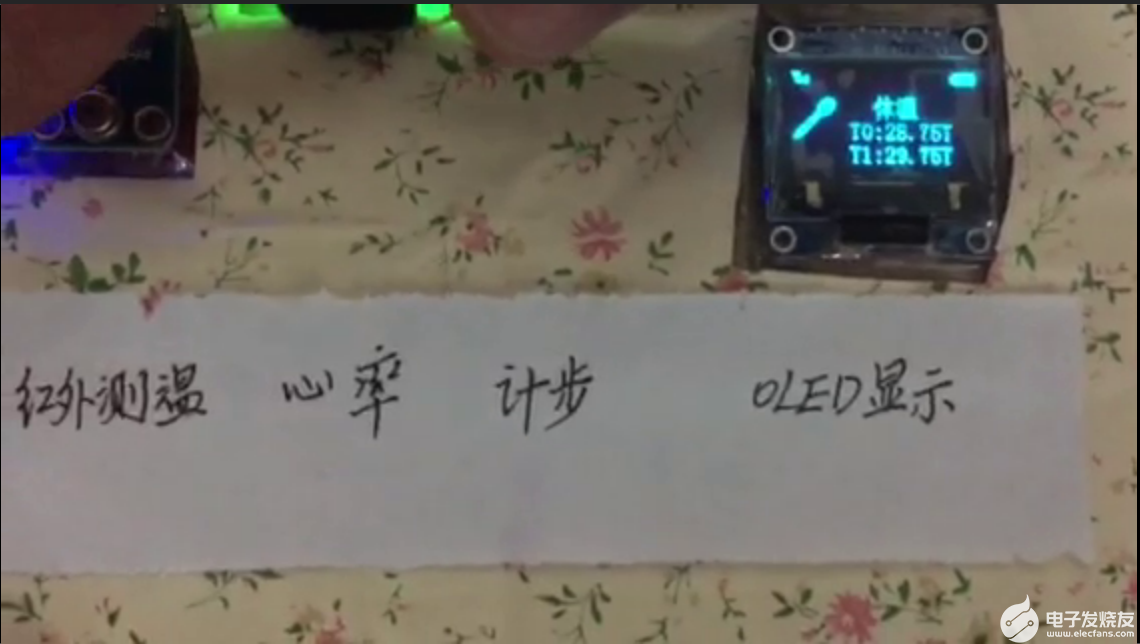
體溫檢測傳感器采用紅外測溫傳感器
運動計步功能采用MPU6050陀螺儀實現
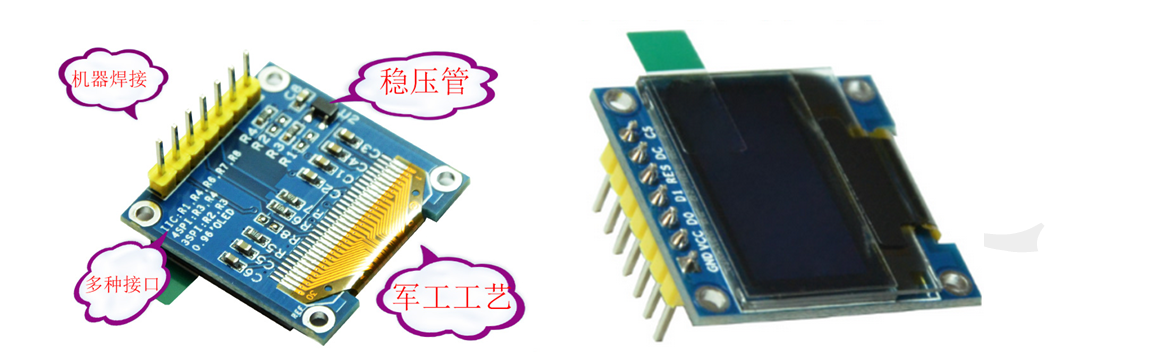
OLED顯示屏采用0.96寸中景園電子的OLED顯示屏-SPI接口
心率傳感器:
MPU6050傳感器:

體溫測溫模塊

OLED顯示屏:
硬件效果圖:
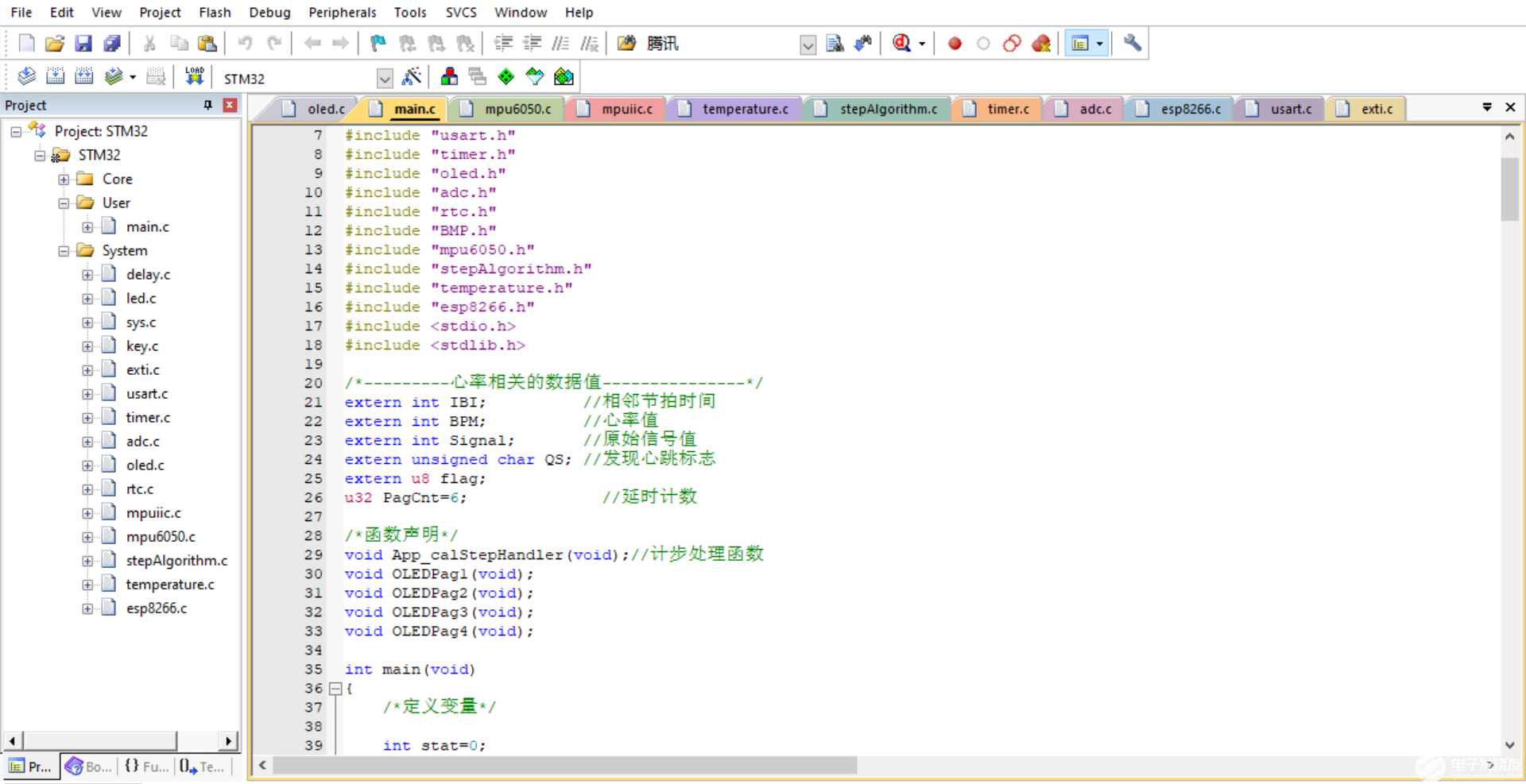
工程源碼截圖:
項目源碼下載地址: https://download.csdn.net/download/xiaolong1126626497/63992839
視頻演示地址: https://live.csdn.net/v/182607
2. 項目源碼介紹
2.1 計步功能實現代碼
計步功能是通過MPU6050陀螺儀測量計算得到,下面貼出計步算法的核心實現代碼.
/*******************************************************************************
文件名: stepAlgorithm.c
描述 : 計步算法
*******************************************************************************/
?
#include "stepAlgorithm.h"
#include "rtc.h"
#include "math.h"
#include "mpu6050.h"
?
#define TRUE 1
#define FALSE 0
#define VALUE_NUM 4
?
?
sportsInfo_t userSportsInfo;
//存放三軸數據
float oriValues[3] = {0};
//用于存放計算閾值的波峰波谷差值
float tempValue[VALUE_NUM] ={0};
int tempCount = 0;
//是否上升的標志位
u8 isDirectionUp = FALSE;
//持續上升次數
int continueUpCount = 0;
//上一點的持續上升的次數,為了記錄波峰的上升次數
int continueUpFormerCount = 0;
//上一點的狀態,上升還是下降
u8 lastStatus = FALSE;
//波峰值
float peakOfWave = 0;
//波谷值
float valleyOfWave = 0;
//此次波峰的時間
long timeOfThisPeak = 0;
//上次波峰的時間
long timeOfLastPeak = 0;
//當前的時間
long timeOfNow = 0;
//當前傳感器的值
float gravityNew = 0;
//上次傳感器的值
float gravityOld = 0;
//動態閾值需要動態的數據,這個值用于這些動態數據的閾值
float initialValue = (float) 1.3;
//初始閾值
float ThreadValue = (float) 2.0;
//三軸軸值
accValue_t accValue;
//行走信息:卡路里、里程、步數
static sportsInfo_t sportsInfo;
//計步緩存
static u8 stepTempCount =0;
?
/*******************************************************************************
* 函數名:onSensorChanged
* 功能描述: G-Sensor工作后會一直調用這個函數對三軸數據進行平方和開根號的處理
* 調用DetectorNewStep檢測步子
*
* 參數說明:
* 輸入:
* pAccValue:G-sensor的原始數據
* timeStamp_p:動態時間戳
* 返回值說明:
* 修改記錄:
*******************************************************************************/
sportsInfo_t *onSensorChanged(accValue_t *pAccValue,timeStamp_t *timeStamp_p,personInfo_t * personInfo)
{
accValue_t *p = pAccValue;
personInfo_t *userInfo = personInfo;
timeStamp_t *time_p = timeStamp_p;
oriValues[0] = p->accX;
oriValues[1] = p->accY;
oriValues[2] = p->accZ;
//對三軸數據進行平方和開根號的處理
gravityNew = (float) sqrt(oriValues[0] * oriValues[0]+ oriValues[1] * oriValues[1] + oriValues[2] * oriValues[2]);
//檢測步子
return DetectorNewStep(gravityNew,time_p,userInfo);
}
?
?
/*******************************************************************************
* 函數名:DetectorNewStep
* 功能描述:
* 步伐更新:如果檢測到了波峰,并且符合時間差以及閾值的條件,則判定為1步
* 閥值更新:符合時間差條件,波峰波谷差值大于initialValue,則將該差值納入閾值的計算中
* 參數說明:
輸入:
values:經過處理的G-sensor數據
timeStamp_p:時間戳
* 返回值說明:
* 修改記錄:sportsInfo_t *onSensorChanged(accValue_t *pAccValue,timeStamp_t *timeStamp_p,personInfo_t * personInfo)
*******************************************************************************/
sportsInfo_t *DetectorNewStep(float values,timeStamp_t *timeStamp_p,personInfo_t * personInfo)
{
static u32 time_old;
personInfo_t *userInfo = personInfo;
static u32 step_per_2_second; //每兩秒所走的步數
float step_lenth,walk_speed,walk_distance,Calories;//步長
u32 time_now;
timeStamp_t *time_p = timeStamp_p;
if (gravityOld == 0)
{
gravityOld = values;
}
else
{
if (DetectorPeak(values, gravityOld))//檢測到波峰
{
timeOfLastPeak = timeOfThisPeak;//更新上次波峰的時間
//將時間戳轉換為以毫秒ms為單位
time_now = timeOfNow = ((time_p->hour*60+time_p->minute)*60+time_p->second)*1000+time_p->twentyMsCount*20; //獲取時間 ,并轉化為毫秒
//如果檢測到了波峰,并且符合時間差以及閾值的條件,則判定為1步
if ( (timeOfNow - timeOfLastPeak >= 250 )//Jahol Fan 修改為300,防止輕微動都也會檢測步子
//&& (timeOfNow - timeOfLastPeak <= 2000)
&&(peakOfWave - valleyOfWave >= ThreadValue)
)
{
timeOfThisPeak = timeOfNow; //更新此次波峰時間
stepTempCount++;//Jahol:加1為兩步
step_per_2_second ++;
//Jahol:這樣計算卡路里,不能濾除人為的誤操作,導致的結果是:里程和卡路里偏大
if((time_now - time_old) >= 2000 ) //如果時間過了2秒
{
?
if( 1 == step_per_2_second )
{
step_lenth = userInfo->height/5;
}
else if( 2 == step_per_2_second )
{
step_lenth = userInfo->height/4;
}
else if( 3 == step_per_2_second )
{
step_lenth = userInfo->height/3;
}
else if( 4 == step_per_2_second )
{
step_lenth = userInfo->height/2;
}
else if(5 == step_per_2_second) //Jahol:為了使計步準確,設置上限值為5步,犧牲卡路里準確性
{
step_lenth = userInfo->height/1.2f;
}
else if( 7 == step_per_2_second )
{
step_lenth = userInfo->height;
}
else if(step_per_2_second >= 8) // step_diff>8
{
step_lenth = userInfo->height*1.2f;
}
else
{
step_lenth = 0;
}
walk_speed = step_per_2_second*step_lenth/2; //速度 ,單位:米/秒
walk_distance = step_per_2_second*step_lenth; //行走距離,單位:米
Calories = 4.5f*walk_speed*(userInfo->weight/2)/1800; //Jahol:weight是以kg為單位
sportsInfo.calories += Calories;
sportsInfo.distance += walk_distance;
time_old = time_now; //更新時間
step_per_2_second = 0;
}
else
{
//do nothing
}
/*
* 處理無效運動:
* 1.連續記錄5才開始計步
* 2.例如記錄的步用戶停住超過3秒,則前面的記錄失效,下次從頭開始
* 3.連續4記錄了步用戶還在運動,之前的數據才有效
* */
if ((stepTempCount< 5 )&&(timeOfNow - timeOfLastPeak >= 3000))
{
stepTempCount = 0;
}
else if((stepTempCount>= 5)&&(timeOfNow - timeOfLastPeak <= 3000))
{
sportsInfo.stepCount += stepTempCount;
stepTempCount = 0;
}
else
{
//do nothing
}
}
//Jahol:更新閥值,問題:閥值不會一直變大,不能變小?
if (timeOfNow - timeOfLastPeak >= 250
&& (peakOfWave - valleyOfWave >= initialValue))
{
timeOfThisPeak = timeOfNow;
ThreadValue = Peak_Valley_Thread(peakOfWave - valleyOfWave);//更新閥值
}
}
}
gravityOld = values;
return &sportsInfo;
}
?
/*******************************************************************************
* 函數名:DetectorPeak
* 功能描述:
*檢測波峰 。以下四個條件判斷為波峰:
*(1)目前點為下降的趨勢:isDirectionUp為FALSE
*(2)之前的點為上升的趨勢:lastStatus為TRUE
*(3)到波峰為止,持續上升大于等于2次
*(4)波峰值大于20 //Jahol:把這個值修改為15
*記錄波谷值 :
*(1)觀察波形圖,可以發現在出現步子的地方,波谷的下一個就是波峰,有比較明顯的特征以及差值
*(2)所以要記錄每次的波谷值,為了和下次的波峰做對比
* 參數說明:
* 輸入:
* newValue:最新的經過處理的G-sensor數據
* oldValue:前一個處理的G-sensor數據
* 返回值說明:
* 修改記錄:
*******************************************************************************/
u8 DetectorPeak(float newValue, float oldValue)
{
lastStatus = isDirectionUp;
if (newValue >= oldValue) //采樣數據呈上升趨勢
{
isDirectionUp = TRUE;
continueUpCount++;
}
else //數據呈下降趨勢
{
continueUpFormerCount = continueUpCount;
continueUpCount = 0;
isDirectionUp = FALSE;
}
if ((!isDirectionUp) && lastStatus
&& (continueUpFormerCount >= 2 || oldValue >= 20))
{
peakOfWave = oldValue;
return TRUE;
}
else if ((!lastStatus) && isDirectionUp)
{
valleyOfWave = oldValue;
return FALSE;
}
else
{
return FALSE;
}
}
/*******************************************************************************
* 函數名:Peak_Valley_Thread
* 功能描述:
* 閾值的計算
* 1.通過波峰波谷的差值計算閾值
* 2.記錄4個值,存入tempValue[]數組中
* 3.在將數組傳入函數averageValue中計算閾值
*
* 參數說明:
* 返回值說明:
* 修改記錄:
*******************************************************************************/
float Peak_Valley_Thread(float value)
{
float tempThread = ThreadValue;
u8 i = 0;
if (tempCount < VALUE_NUM)
{
tempValue[tempCount] = value;
tempCount++;
}
else
{
tempThread = averageValue(tempValue, VALUE_NUM);//計算閥值
for ( i = 1;i < VALUE_NUM;i++)//線性移位更新
{
tempValue[i - 1] = tempValue[i];
}
tempValue[VALUE_NUM - 1] = value;
}
return tempThread;
}
?
/*******************************************************************************
* 函數名:averageValue
* 功能描述:
* 梯度化閾值
* 1.計算數組的均值
* 2.通過均值將閾值梯度化在一個范圍里
*
* 參數說明:
* 返回值說明:
* 修改記錄:
*******************************************************************************/
float averageValue(float value[], int n)
{
float ave = 0;
u8 i =0;
for ( i = 0; i < n; i++)
{
ave += value[i];//求和
}
ave = ave / VALUE_NUM;//求平均值
if (ave >= 8)
ave = (float) 4.3; //????
else if (ave >= 7 && ave < 8)
ave = (float) 3.3;
else if (ave >= 4 && ave < 7)
ave = (float) 2.3;
else if (ave >= 3 && ave < 4)
ave = (float) 2.0;
else
{
ave = (float) 1.3;
}
return ave;
}
?
?
personInfo_t user_info;
u8 WatchInfo_init(void)
{
WatchInfo_setUserInfo(170,134); //設置身高、體重用于計算卡路里消耗
return 0; //初始化成功返回0
}
/**********************************************************************************************************
* 函數名: WatchInfo_setUserInfo
* 功能描述: 設置手表使用者的個人信息
* 參數說明:
* 返回值說明:
* 修改記錄:
**********************************************************************************************************/
u8 WatchInfo_setUserInfo(u8 height,u8 weight)
{
user_info.height = ((float)height)/100;
user_info.weight = ((float)weight)/2;
return 0;//成功 0
}
?
?
personInfo_t * WatchInfo_getUserInfo(u8 *error)
{
u8 err;
err = 0;//0表示獲取成功
error = &err;
return &user_info;
}
2.2 ESP8266 WIFI模塊
設備測量的數據最終通過WIFI傳遞給手機APP顯示,下面列出ESP8266的核心代碼。
#include "esp8266.h"
extern u8 USART3_RX_BUF[USART3_MAX_RECV_LEN]; //接收緩沖,最大USART3_MAX_RECV_LEN字節
extern u8 USART3_TX_BUF[USART3_MAX_SEND_LEN]; //發送緩沖,最大USART3_MAX_SEND_LEN字節
extern vu16 USART3_RX_STA; //接收數據狀態
?
///
//用戶配置區
?
//連接端口號:8086,可自行修改為其他端口.
const u8 portnum[]="8089";
?
//WIFI STA模式,設置要去連接的路由器無線參數,請根據你自己的路由器設置,自行修改.
const u8 wifista_ssid[]="wbyq1"; //路由器SSID號
const u8 wifista_encryption[]="wpa2_aes"; //wpa/wpa2 aes加密方式
const u8 wifista_password[]="123456789"; //連接密碼
?
//WIFI AP模式,模塊對外的無線參數,可自行修改.
const u8 wifiap_ssid[]="Cortex_M3"; //對外SSID號
const u8 wifiap_encryption[]="wpawpa2_aes"; //wpa/wpa2 aes加密方式
const u8 wifiap_password[]="12345678"; //連接密碼
?
?
/*
函數功能:向ESP82668266發送命令
函數參數:
cmd:發送的命令字符串
ack:期待的應答結果,如果為空,則表示不需要等待應答
waittime:等待時間(單位:10ms)
返 回 值:
0,發送成功(得到了期待的應答結果)
1,發送失敗
*/
u8 ESP8266_SendCmd(u8 *cmd,u8 *ack,u16 waittime)
{
u8 res=0;
USART3_RX_STA=0;
UsartStringSend(USART3,cmd);//發送命令
if(ack&&waittime) //需要等待應答
{
while(--waittime) //等待倒計時
{
DelayMs(10);
if(USART3_RX_STA&0X8000)//接收到期待的應答結果
{
if(ESP8266_CheckCmd(ack))
{
res=0;
//printf("cmd->ack:%s,%s\r\n",cmd,(u8*)ack);
break;//得到有效數據
}
USART3_RX_STA=0;
}
}
if(waittime==0)res=1;
}
return res;
}
?
?
/*
函數功能:ESP8266發送命令后,檢測接收到的應答
函數參數:str:期待的應答結果
返 回 值:0,沒有得到期待的應答結果
其他,期待應答結果的位置(str的位置)
*/
u8* ESP8266_CheckCmd(u8 *str)
{
char *strx=0;
if(USART3_RX_STA&0X8000) //接收到一次數據了
{
USART3_RX_BUF[USART3_RX_STA&0X7FFF]=0;//添加結束符
strx=strstr((const char*)USART3_RX_BUF,(const char*)str); //查找是否應答成功
printf("RX=%s",USART3_RX_BUF);
}
return (u8*)strx;
}
?
/*
函數功能:向ESP8266發送指定數據
函數參數:
data:發送的數據(不需要添加回車)
ack:期待的應答結果,如果為空,則表示不需要等待應答
waittime:等待時間(單位:10ms)
返 回 值:0,發送成功(得到了期待的應答結果)luojian
*/
u8 ESP8266_SendData(u8 *data,u8 *ack,u16 waittime)
{
u8 res=0;
USART3_RX_STA=0;
UsartStringSend(USART3,data);//發送數據
if(ack&&waittime) //需要等待應答
{
while(--waittime) //等待倒計時
{
DelayMs(10);
if(USART3_RX_STA&0X8000)//接收到期待的應答結果
{
if(ESP8266_CheckCmd(ack))break;//得到有效數據
USART3_RX_STA=0;
}
}
if(waittime==0)res=1;
}
return res;
}
?
/*
函數功能:ESP8266退出透傳模式
返 回 值:0,退出成功;
1,退出失敗
*/
u8 ESP8266_QuitTrans(void)
{
while((USART3->SR&0X40)==0); //等待發送空
USART3->DR='+';
DelayMs(15); //大于串口組幀時間(10ms)
while((USART3->SR&0X40)==0); //等待發送空
USART3->DR='+';
DelayMs(15); //大于串口組幀時間(10ms)
while((USART3->SR&0X40)==0); //等待發送空
USART3->DR='+';
DelayMs(500); //等待500ms
return ESP8266_SendCmd("AT","OK",20);//退出透傳判斷.
}
?
?
/*
函數功能:獲取ESP82668266模塊的AP+STA連接狀態
返 回 值:0,未連接;1,連接成功
*/
u8 ESP8266_ApStaCheck(void)
{
if(ESP8266_QuitTrans())return 0; //退出透傳
ESP8266_SendCmd("AT+CIPSTATUS",":",50); //發送AT+CIPSTATUS指令,查詢連接狀態
if(ESP8266_CheckCmd("+CIPSTATUS:0")&&
ESP8266_CheckCmd("+CIPSTATUS:1")&&
ESP8266_CheckCmd("+CIPSTATUS:2")&&
ESP8266_CheckCmd("+CIPSTATUS:4"))
return 0;
else return 1;
}
?
?
/*
函數功能:獲取ESP8266模塊的連接狀態
返 回 值:0,未連接;1,連接成功.
*/
u8 ESP8266_ConstaCheck(void)
{
u8 *p;
u8 res;
if(ESP8266_QuitTrans())return 0; //退出透傳
ESP8266_SendCmd("AT+CIPSTATUS",":",50); //發送AT+CIPSTATUS指令,查詢連接狀態
p=ESP8266_CheckCmd("+CIPSTATUS:");
res=*p; //得到連接狀態
return res;
}
?
/*
函數功能:獲取ip地址
函數參數:ipbuf:ip地址輸出緩存區
*/
void ESP8266_GetWanip(u8* ipbuf)
{
u8 *p,*p1;
if(ESP8266_SendCmd("AT+CIFSR\r\n","OK",50))//獲取WAN IP地址失敗
{
ipbuf[0]=0;
return;
}
p=ESP8266_CheckCmd(""");
p1=(u8*)strstr((const char*)(p+1),""");
*p1=0;
sprintf((char*)ipbuf,"%s",p+1);
}
?
/*
函數功能:將收到的AT指令應答數據返回給電腦串口
參 數:mode:0,不清零USART3_RX_STA;
1,清零USART3_RX_STA;
*/
void ESP8266_AtResponse(u8 mode)
{
if(USART3_RX_STA&0X8000) //接收到一次數據了
{
USART3_RX_BUF[USART3_RX_STA&0X7FFF]=0;//添加結束符
printf("%s",USART3_RX_BUF); //發送到串口
if(mode)USART3_RX_STA=0;
}
}
?
?
/*
函數功能:ESP8266 AP模式+TCP服務器模式測試
*/
void ESP8266_APorServer(void)
{
u8 p[100],key;
u8 ipbuf[20];
// u32 rlen=0; //接收長度
// u32 constate,t=0;
while(ESP8266_SendCmd("AT\r\n","OK",20))//檢查WIFI模塊是否在線
{
ESP8266_QuitTrans();//退出透傳
ESP8266_SendCmd("AT+CIPMODE=0\r\n","OK",200); //關閉透傳模式
printf("未檢測到模塊,正在嘗試連接模塊...\r\n");
DelayMs(800);
}
printf("ESP8266模塊檢測OK!\r\n");
while(ESP8266_SendCmd("ATE0\r\n","OK",20)); //關閉回顯
printf("請用設備連接WIFI熱點:%s,%s,%ss\r\n",(u8*)wifiap_ssid,(u8*)wifiap_encryption,(u8*)wifiap_password);
/*1. 設置WIFI AP模式 */
ESP8266_SendCmd("AT+CWMODE=2\r\n","OK",50);
/*2. 重啟模塊 */
ESP8266_SendCmd("AT+RST\r\n","OK",20);
/*3. 延時3S等待重啟成功*/
DelayMs(1000);
DelayMs(1000);
DelayMs(1000);
/*5. 配置模塊AP模式無線參數*/
sprintf((char*)p,"AT+CWSAP="%s","%s",1,4\r\n",wifiap_ssid,wifiap_password);
ESP8266_SendCmd(p,"OK",1000);
/*4. 設置多連接模式:0單連接,1多連接(服務器模式必須開啟)*/
ESP8266_SendCmd("AT+CIPMUX=1\r\n","OK",20);
/*5. 開啟Server模式(0,關閉;1,打開),端口號為portnum */
sprintf((char*)p,"AT+CIPSERVER=1,%s\r\n",(u8*)portnum);
ESP8266_SendCmd(p,"OK",50);
/*6. 獲取當前模塊的IP*/
ESP8266_GetWanip(ipbuf);//
printf("IP地址:%s 端口:%s",ipbuf,(u8*)portnum);
USART3_RX_STA=0; //清空串口的接收標志位
// while(1)
// {
// key=GetKeyVal(1);//退出測試
// if(key==1)
// {
// printf("退出測試!\r\n");
// ESP8266_QuitTrans(); //退出透傳
// ESP8266_SendCmd("AT+CIPMODE=0","OK",20); //關閉透傳模式
// break;
// }
// else if(key==2) //發送數據
// {
// ESP8266_SendCmd("AT+CIPSEND=0,12\r\n","OK",200); //設置發送數據長度為12個
// ESP8266_SendData("ESP8266測試!","OK",100); //發送指定長度的數據
// DelayMs(200);
// }
// t++;
// DelayMs(10);
// if(USART3_RX_STA&0X8000) //接收到一次數據了
// {
// rlen=USART3_RX_STA&0X7FFF; //得到本次接收到的數據長度
// USART3_RX_BUF[rlen]=0; //添加結束符
// printf("接收的數據: rlen=%d,%s",rlen,USART3_RX_BUF); //發送到串口
// USART3_RX_STA=0;
// if(constate!=3)t=1000; //狀態為還未連接,立即更新連接狀態
// else t=0; //狀態為已經連接了,10秒后再檢查
// }
// if(t==1000)//連續10秒鐘沒有收到任何數據,檢查連接是不是還存在.
// {
constate=ESP8266_ConstaCheck();//得到連接狀態
if(!constate)printf("連接失敗!\r\n");
// t=0;
// }
// if((t%20)==0)LED2=!LED2;
// ESP8266_AtResponse(1);
// }
}
審核編輯:湯梓紅
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
mcu
+關注
關注
146文章
17644瀏覽量
357165 -
STM32
+關注
關注
2281文章
10979瀏覽量
360773 -
檢測設備
+關注
關注
0文章
655瀏覽量
17124
發布評論請先 登錄
相關推薦
基于低功耗藍牙的心率帶方案說明
`隨著藍牙技術聯盟(Bluetooth SIG)宣布支持藍牙4.0版本的藍牙體溫計和心率檢測器產品的面市,由此開啟了醫療和健身領域無線監測設備的新紀元。本產品集成
發表于 07-20 08:40
具有紅外測溫的便攜式心率計
方案概述 方案概述:具有紅外測溫功能的便攜式心率計,主要應用為人體服務的,能夠方便快捷地測量人體的溫度,也能夠測量人體不同狀態下的心率。使人們能夠隨時隨地的知道自己的
發表于 11-14 19:25
心率檢測儀的設計與實現:stm32視頻教程分享 精選資料分享
心率檢測儀的設計與實現:stm32視頻教程分享 STM32系列是基于專為要求高性能、低成本、低功耗的嵌入式應用專門設計的ARM Cortex-M3內核。 本項目主要講述了通過心律傳感器
發表于 08-03 07:24
如何去實現一種基于STM32的體溫心率步數采集系統設計
百度網盤下載地址(943):點擊下載實現功能如下:1) 通過重力加速度傳感器ADXL345檢測人的狀態,計算出走路步數、走路距離和平均速度。2)通過心率傳感器實時檢測
發表于 02-21 07:38
智能手環軟硬件方案(心率+計步+睡眠)
本方案運用藍牙傳輸技術結合自主研發的抗干擾計步算法、自動識別睡眠算法、24小時實時動態心率監測算法,具有有心率監測、計
發表于 12-23 18:20
?636次下載
IP67心率計防水檢測操作的具體流程是怎樣的
。 一般情況下心率計如果遇水(雨雪天氣或者濺起來的水)或者身體流汗過多,心率計會不起作用或者顯示的心率不準確,因此大多心率計會做防水處理,然后可以通過
發表于 01-06 12:04
?1323次閱讀
基于STM32實現的體溫_心率_步數采集系統設計
百度網盤下載地址(943):點擊下載實現功能如下:1) 通過重力加速度傳感器ADXL345檢測人的狀態,計算出走路步數、走路距離和平均速度。2)通過心率傳感器實時檢測
發表于 12-24 19:35
?24次下載

測溫掃陜西健康碼設備哪家好?健康碼識別終端設備怎么選擇?
控的總體要求,就目前而言公共場所實行的驗碼測溫、戴口罩、防聚集等防疫措施,這一系列防疫查驗工作其實都可以通過測溫掃陜西健康碼設備來完成的。測溫

基于STM32單片機的智能手環系統設計
本次智能手環的設計使用STM32單片機作為控制中心,通過心率傳感器測量心率,通過DS18B20測溫,通過振動傳感器計
求一種基于STM32單片機的健康檢測系統設計方案
本次健康檢測系統的設計使用STM32單片機作為控制中心,通過DS18B20C測溫,通過心率模塊測量心率
發表于 08-27 10:31
?1115次閱讀

基于STM32單片機的檢測手環系統設計
本次檢測手環系統的設計使用STM32單片機作為控制中心,通過DHP11溫濕度傳感器檢測溫度,通過心率傳感器檢測






 工商網監
工商網監
評論