 基于ATmega16構建的線跟隨機器人的完整電路圖
基于ATmega16構建的線跟隨機器人的完整電路圖
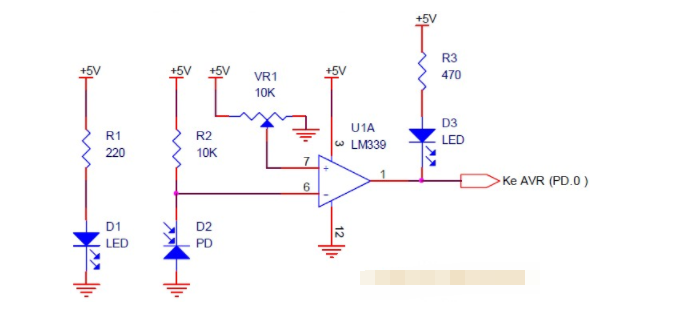
這是基于ATmega16構建的線跟隨機器人的完整電路圖。線跟隨機器人電路有傳感器模塊、微控制器模塊和直流電機模塊三個模塊。
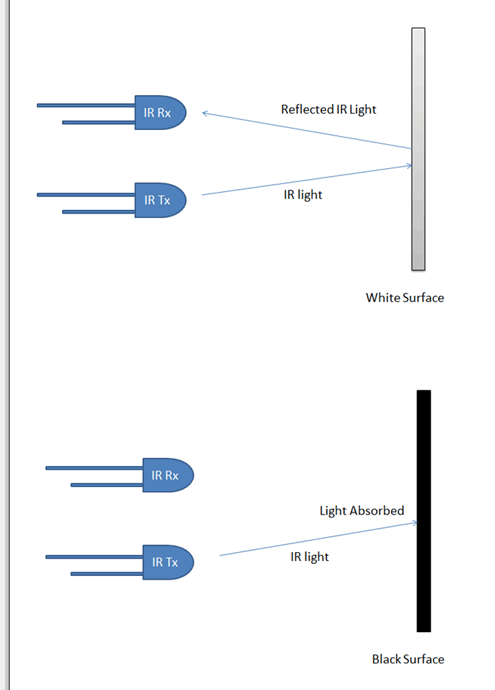
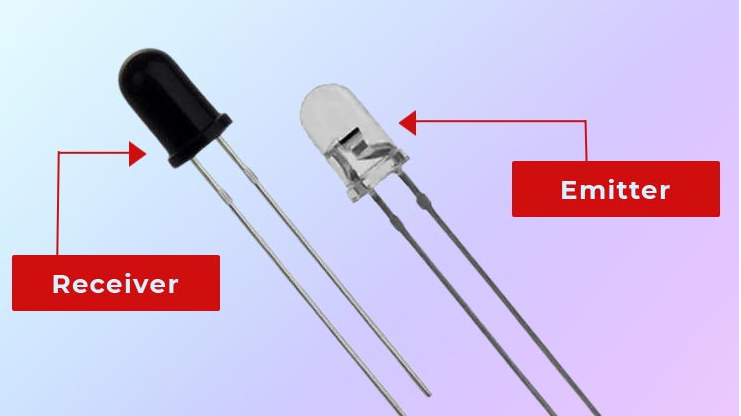
紅外傳感器示意圖:
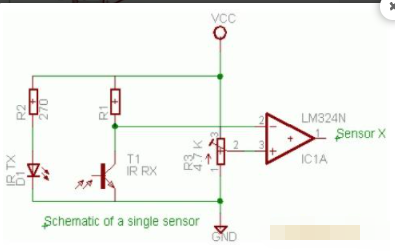
機器人使用IR傳感器來感應線路,在此設置中使用了面向地面的8個IRLED(Tx)和傳感器(Rx)陣列。傳感器的輸出是一個模擬信號,它取決于反射回來的光量,該模擬信號被提供給比較器以產生0和1,然后將其饋送到uC
主板(單片機+直流電機驅動原理圖):
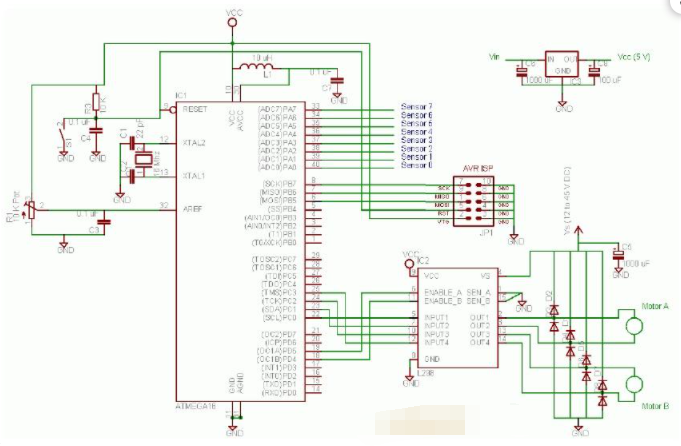
L298電機驅動器有4個用于控制電機運動的輸入和兩個用于打開和關閉電機的使能輸入。為了控制電機的速度,將具有可變占空比的PWM波形應用于使能引腳。快速切換Vs和GND之間的電壓會在Vs和GND之間產生一個有效電壓,其值取決于PWM的占空比。100%占空比對應于等于Vs的電壓,50%對應于0.5Vs等等。1N4004二極管用于防止電機的反電動勢干擾其余電路。許多電路使用L293D進行電機控制,我選擇了L298,因為它的電流容量為每通道2A@45V,而L293D的電流容量為0.6A@36V。L293D的封裝不適合裝好散熱片,實際16V以上不油炸是不能用的。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
電路圖
+關注
關注
10382文章
10729瀏覽量
537874 -
機器人
+關注
關注
212文章
29146瀏覽量
210574 -
ATmega16
+關注
關注
5文章
154瀏覽量
46227
發布評論請先 登錄
相關推薦
如何使用AVR單片機構建一個線跟隨機器人
今天我們將使用AVR 單片機構建一個線跟隨機器人。線跟隨機器人現在廣泛用于制造業、醫療、家庭應用和貨物倉庫。
發表于 09-08 15:45
?1204次閱讀
如何使用PIC微控制器構建一個線路跟隨機器人
線路跟隨機器人是一個簡單而迷人的機器人,適合大多數學生/業余愛好者建造。在本教程中,我們將學習線路跟隨機器人的工作原理以及如何使用 PIC 微控制器 PIC16F877A
發表于 11-30 17:17
?1777次閱讀
基于ATmega8535的機器人的電路圖
這是ATmega8535 Line Follower / Line Tracker機器人的電路圖。該電路取自教程文檔。






 工商網監
工商網監
評論