") CAN通信物理層和協(xié)議層簡(jiǎn)介
CAN通信物理層和協(xié)議層簡(jiǎn)介
1、CAN物理層和協(xié)議層
CAN與串口類似,都是異步通信,利用兩根差分線來(lái)進(jìn)行信號(hào)的傳輸。
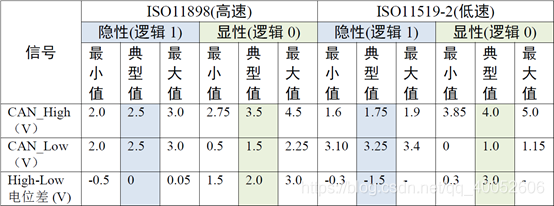
在多節(jié)點(diǎn)進(jìn)行數(shù)據(jù)傳輸時(shí)主要分為遵循ISO11898標(biāo)準(zhǔn)的高速短距離閉環(huán)形式和遵循ISO11519標(biāo)準(zhǔn)的低速遠(yuǎn)距離開(kāi)環(huán)網(wǎng)絡(luò)。這兩種形式主要是在硬件設(shè)計(jì)時(shí)根據(jù)實(shí)際應(yīng)用情況加入120歐姆或者2.2千歐姆電阻。
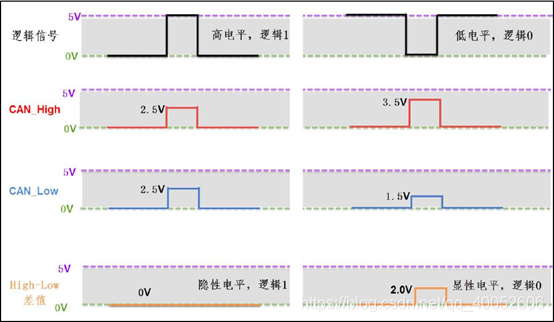
在CAN通信時(shí)信號(hào)邏輯和平時(shí)常用的電平表示不太一樣,根據(jù)標(biāo)準(zhǔn)電平表示形式如下圖:
CAN報(bào)文類型有5種,分別是數(shù)據(jù)幀、遙控幀、錯(cuò)誤幀、過(guò)載幀、幀間隔。而我們常用的是數(shù)據(jù)幀,數(shù)據(jù)幀分為標(biāo)準(zhǔn)數(shù)據(jù)幀和擴(kuò)展數(shù)據(jù)幀兩種。數(shù)據(jù)幀結(jié)構(gòu)如下圖:
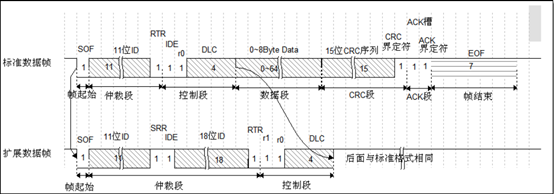
數(shù)據(jù)幀是以一個(gè)下降沿的電平來(lái)開(kāi)始界定開(kāi)始的。以7個(gè)連續(xù)隱性電平結(jié)束的。數(shù)據(jù)幀中間包含幀起始、仲裁段、控制段、數(shù)據(jù)段、CRC段、ACK段和幀結(jié)束段。
幀起始SOF段(Start Of Frame),幀起始信號(hào)只有一個(gè)數(shù)據(jù)位,是一個(gè)顯性電平,它用于監(jiān)測(cè)數(shù)據(jù)傳輸?shù)拈_(kāi)始,通過(guò)電平跳變沿來(lái)進(jìn)行數(shù)據(jù)起始位的確定。
仲裁段:內(nèi)容是數(shù)據(jù)幀的ID信息,標(biāo)準(zhǔn)幀ID長(zhǎng)度是11位,擴(kuò)展幀為18位。CAN 協(xié)議不對(duì)掛載在它之上的節(jié)點(diǎn)分配優(yōu)先級(jí)和地址,對(duì)總線的占有權(quán)是由幀的ID決定的,對(duì)于重要信息給與一個(gè)優(yōu)先級(jí)較高的ID,這樣數(shù)據(jù)就能及時(shí)的發(fā)送出去。而ID優(yōu)先級(jí)的仲裁原則是由物理層決定的,總線狀態(tài)總是顯性電平掩蓋隱形電平,因此顯性ID優(yōu)先級(jí)較高。
仲裁段還包括(1)RTR 位(Remote Transmission Request Bit),譯作遠(yuǎn)程傳輸請(qǐng)求位,它是用于區(qū)分?jǐn)?shù)據(jù)幀和遙控幀的,當(dāng)它為顯性電平時(shí)表示數(shù)據(jù)幀,隱性電平時(shí)表示遙控幀。
(2) IDE 位(Identifier Extension Bit),譯作標(biāo)識(shí)符擴(kuò)展位,它是用于區(qū)分標(biāo)準(zhǔn)格式與擴(kuò)展格式,當(dāng)它為顯性電平時(shí)表示標(biāo)準(zhǔn)格式,隱性電平時(shí)表示擴(kuò)展格式。
(3) SRR 位(Substitute Remote Request Bit),只存在于擴(kuò)展格式,它用于替代標(biāo)準(zhǔn)格式中的
RTR 位。由于擴(kuò)展幀中的SRR 位為隱性位,RTR 在數(shù)據(jù)幀為顯性位,所以在兩個(gè)ID相同的標(biāo)準(zhǔn)格式報(bào)文與擴(kuò)展格式報(bào)文中,標(biāo)準(zhǔn)格式的優(yōu)先級(jí)較高。
控制段:在控制段中的r1 和r0 為保留位,默認(rèn)設(shè)置為顯性位。它最主要的是DLC 段(Data
Length Code),譯為數(shù)據(jù)長(zhǎng)度碼,它由4 個(gè)數(shù)據(jù)位組成,用于表示本報(bào)文中的數(shù)據(jù)段含有多
少個(gè)字節(jié),DLC 段表示的數(shù)字為0~8。
數(shù)據(jù)段:數(shù)據(jù)段為數(shù)據(jù)幀的核心內(nèi)容,它是節(jié)點(diǎn)要發(fā)送的原始信息,由0~8 個(gè)字節(jié)組成,MSB先行。
CRC 段:為了保證報(bào)文的正確傳輸,CAN 的報(bào)文包含了一段15 位的CRC 校驗(yàn)碼,一旦接收節(jié)點(diǎn)算出的CRC 碼跟接收到的CRC 碼不同,則它會(huì)向發(fā)送節(jié)點(diǎn)反饋出錯(cuò)信息,利用錯(cuò)誤幀請(qǐng)求它重新發(fā)送。CRC 部分的計(jì)算一般由CAN 控制器硬件完成,出錯(cuò)時(shí)的處理則由軟件控制最大重發(fā)數(shù)。
ACK 段:ACK 段包括一個(gè)ACK 槽位,和ACK 界定符位。類似I2C 總線,在ACK 槽位中,發(fā)送節(jié)點(diǎn)發(fā)送的是隱性位,而接收節(jié)點(diǎn)則在這一位中發(fā)送顯性位以示應(yīng)答。在ACK 槽和幀結(jié)束之間由ACK 界定符間隔開(kāi)。
幀結(jié)束EOF 段(End Of Frame),幀結(jié)束段由發(fā)送節(jié)點(diǎn)發(fā)送的7 個(gè)隱性位表示結(jié)束。
2、傳輸?shù)牟ㄌ芈?/span>
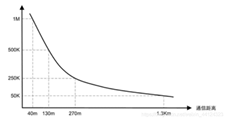
CAN由于是異步通信,通信波特率與串口波特率定義類似,波特率的定義有每個(gè)子的長(zhǎng)度來(lái)確定的。CAN的通信距離與波特率存在負(fù)相關(guān)關(guān)系,波特率越高,傳輸距離越短。CAN通信波特率與傳輸距離關(guān)系如下圖:
3、FPGA實(shí)現(xiàn)思路
在進(jìn)行FPGA實(shí)現(xiàn)時(shí)主要是實(shí)現(xiàn)一個(gè)完備的狀態(tài)轉(zhuǎn)移狀態(tài)機(jī)。在設(shè)計(jì)狀態(tài)機(jī)時(shí)需要對(duì)最復(fù)雜的包格式進(jìn)行設(shè)計(jì)。通過(guò)對(duì)控制段進(jìn)行判斷來(lái)跳轉(zhuǎn)到不同類型幀格式的狀態(tài),根據(jù)數(shù)據(jù)長(zhǎng)度來(lái)完成對(duì)數(shù)據(jù)的接收和發(fā)送。由于FPGA實(shí)現(xiàn)完備的CAN收發(fā)驅(qū)動(dòng)并不是所有項(xiàng)目所必須的,因此根據(jù)不同項(xiàng)目來(lái)進(jìn)行特定包數(shù)據(jù)的收發(fā)。
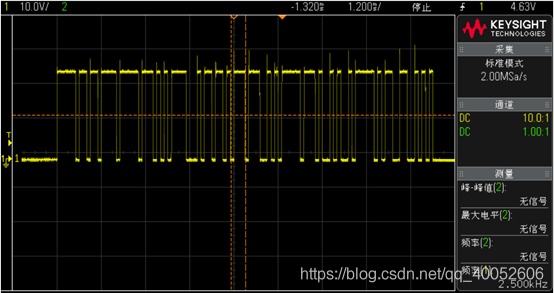
通過(guò)上面描述對(duì)CAN數(shù)據(jù)格式有了一個(gè)基本上認(rèn)識(shí),下面是通過(guò)示波器抓取CAN標(biāo)準(zhǔn)數(shù)據(jù)幀波形,示波器正連接CANH端,示波器負(fù)極連接CANL端。波特率是10Kbps,有效數(shù)據(jù)長(zhǎng)度8字節(jié)。
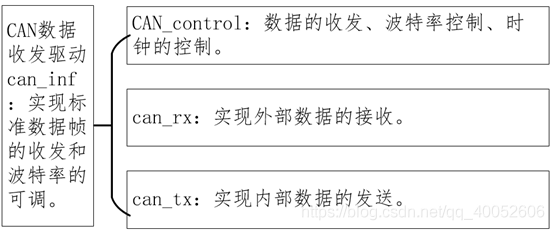
CAN數(shù)據(jù)收發(fā)架構(gòu)設(shè)計(jì)如下圖:
4、FPGA實(shí)現(xiàn)代碼
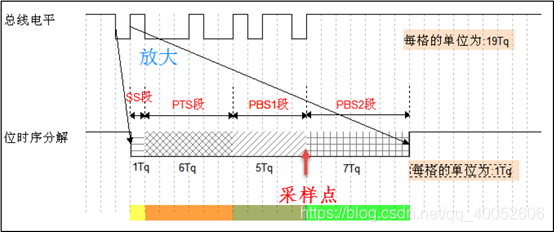
在實(shí)現(xiàn)波特率可調(diào)的數(shù)據(jù)收發(fā)控制時(shí)需要注意的是每個(gè)波特?cái)?shù)據(jù)的采樣點(diǎn)。CAN數(shù)據(jù)采樣時(shí)序如下圖所示,一般采樣點(diǎn)都是在數(shù)據(jù)穩(wěn)當(dāng)?shù)闹虚g點(diǎn)位置,因此在設(shè)計(jì)FPGA中CAN模塊的時(shí)鐘頻率應(yīng)當(dāng)是數(shù)據(jù)波特率的20倍。
在以10Kbps采樣率位例,CAN收發(fā)模塊時(shí)鐘設(shè)計(jì)如下:
//
//數(shù)據(jù)速率位10Kbps,一個(gè)數(shù)據(jù)位時(shí)間為10us.數(shù)據(jù)采集在5us時(shí)刻。
CAN波特率設(shè)置
reg[7:0]can_div;//500倍分頻,一個(gè)數(shù)據(jù)位分為20份
regcan_clk;
always @(posedge clk_100m or negedge rst_n )begin
if(rst_n==1'b0) begin
can_div<= 'b0;
end else if (can_div==249) begin
can_div<= 'b0;
endelse begin
can_div<= can_div + 1'b1;
end
end
always @(posedge clk_100m or negedge rst_n )begin
if(rst_n==1'b0) begin
can_clk<= 'b0;
end else if (can_div==249) begin
can_clk<= can_clk + 1'b1;
end
end
//時(shí)鐘經(jīng)過(guò)BUFG緩沖
wirecan_clk_o;
BUFG can_clk_obuf (.I(can_clk), .O(can_clk_o));
數(shù)據(jù)的收發(fā)需要根據(jù)實(shí)際的項(xiàng)目情況進(jìn)行組包控制,這里就不進(jìn)行細(xì)致描述了。
CAN實(shí)現(xiàn)數(shù)據(jù)的收發(fā)兩個(gè)過(guò)程中對(duì)應(yīng)FPGA來(lái)說(shuō)由于接收相對(duì)復(fù)雜,就以接收模塊進(jìn)行描述。
數(shù)據(jù)的接收過(guò)程就按照一般的狀態(tài)機(jī)進(jìn)行設(shè)計(jì)就行,需要注意的是不同類型幀的跳轉(zhuǎn)是在控制段進(jìn)行了,因此在控制段會(huì)發(fā)生狀態(tài)的跳轉(zhuǎn)。CAN接收狀態(tài)的狀態(tài)機(jī)實(shí)現(xiàn)如下圖:
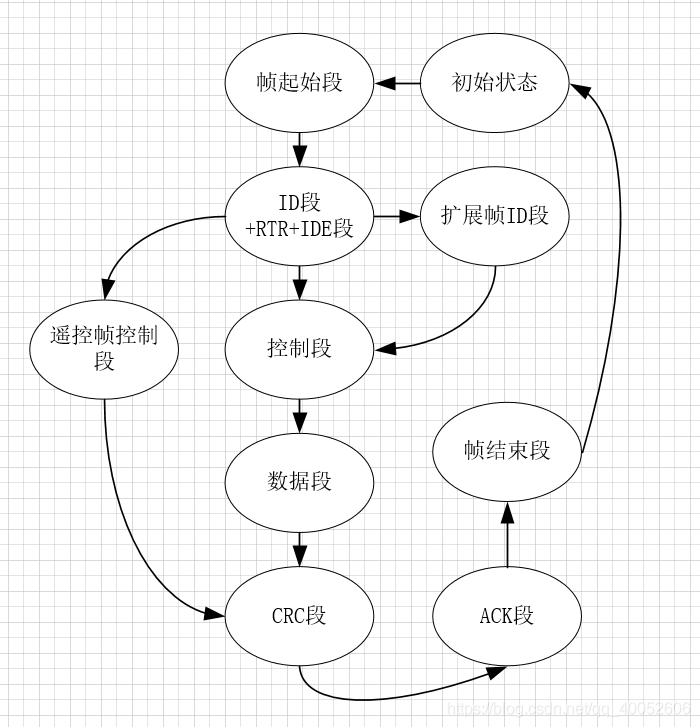
這個(gè)狀態(tài)機(jī)的實(shí)現(xiàn)并不復(fù)雜,主要是對(duì)幀類型進(jìn)行判斷。然后根據(jù)數(shù)據(jù)長(zhǎng)度把數(shù)據(jù)解析出來(lái)。下面是實(shí)現(xiàn)CAN數(shù)據(jù)接收代碼:
`timescale 1ns / 1ps
//
// Company:
// Engineer:
//
// Create Date:
// Design Name:
// Module Name: can_rx
// Project Name:
// Target Devices:
// Tool versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//
module can_rx(
input wire can_clk ,
input wire rst_n ,
inputwirecan_rx,
outputregcan_ack_out_low,
outputregcan_id_out_en,
outputreg[10:0]can_id_out,
outputregcan_data_out_en,
outputreg[63:0]can_data_out
);
reg[8:0]state;
regcan_rx_t;
regerror_state;
reg[9:0]error_data;
reg[4:0]one_bit_cont;
reg[10:0]can_id;
reg[6:0]bit_cont;
regid_en_flag;
regcontral_flag;
regdata_en_flag;
regcic_en_flag;
regcan_rx_en_flag;
regcan_rx_unen_flag;
reg[4:0]can_continuity_data;
regcan_continuity_data_flag;
reg[4:0]can_id_data_cont;
reg[3:0]can_contral_data_cont;
reg[6:0]can_data_data_cont;
reg[4:0]can_cic_data_cont;
always @(posedge can_clk or negedge rst_n )begin
if(rst_n==1'b0) begin
can_rx_t<= 'b0;
end else begin
can_rx_t<= can_rx;
end
end
parameterstate_idle = 9'b000000000;//狀態(tài)機(jī)初始化
parameterstate_start = 9'b000000001;//監(jiān)測(cè)到開(kāi)始標(biāo)志
parameterstate_sof = 9'b000000010; //開(kāi)始幀頭第一位SOF
parameterstate_id = 9'b000000100; //包ID
parameterstate_control = 9'b000001000; //標(biāo)準(zhǔn)幀控制段
parameterstate_data = 9'b000010000; //數(shù)據(jù)段
parameterstate_crc = 9'b000100000; //CRC段
parameterstate_ack = 9'b001000000; //ACK段
parameterstate_eof = 9'b010000000; //幀結(jié)束段
parameterstate_end = 9'b100000000; //狀態(tài)機(jī)結(jié)束狀態(tài)
parameterbit_flag_no = 5'b10011;
always @(posedge can_clk or negedge rst_n )begin
if(rst_n==1'b0) begin
state<= 'b0;
one_bit_cont<= 'b0;
bit_cont<= 'b0;
id_en_flag<= 'b0;
contral_flag<= 'b0;
data_en_flag <= 'b0;
cic_en_flag<= 'b0;
can_rx_en_flag <= 'b0;
can_ack_out_low<= 'b1;
end else case(state)
state_idle:begin if ((can_rx_t==1'b1)&&(can_rx==1'b0))begin
state<= state_sof;
one_bit_cont<= 'b0;
can_rx_en_flag <= 'b1;
end else begin
state<= state_idle;
one_bit_cont<= 'b0;
bit_cont<= 'b0;
id_en_flag<= 'b0;
contral_flag <= 'b0;
data_en_flag<= 'b0;
cic_en_flag <= 'b0;
can_rx_en_flag <= 'b0;
can_ack_out_low<= 'b1;
end
end
state_sof:begin if ((one_bit_cont==bit_flag_no)&&(can_rx==1'b0))begin
state<= state_id;
id_en_flag<= 'b1;
one_bit_cont<= 'b0;
end else if ((one_bit_cont
state<= state_sof;
one_bit_cont<= one_bit_cont + 1'b1;
end
end
state_id:begin if ((one_bit_cont==bit_flag_no)&&(bit_cont==can_id_data_cont))begin
state<= state_control;
id_en_flag<= 'b0;
contral_flag<= 'b1;
one_bit_cont<= 'b0;
bit_cont<= 'b0;
end else if ((one_bit_cont==bit_flag_no)&&(bit_cont
state<= state_id;
one_bit_cont<= 'b0;
bit_cont<= bit_cont + 1'b1;
end else if (one_bit_cont
state<= state_id;
one_bit_cont<= one_bit_cont + 1'b1;
end else begin
state<= state_idle;
end
end
state_control:begin if ((one_bit_cont==bit_flag_no)&&(bit_cont==can_contral_data_cont))begin
state<= state_data;
contral_flag<= 'b0;
one_bit_cont<= 'b0;
bit_cont<= 'b0;
data_en_flag <= 'b1;
end else if ((one_bit_cont==bit_flag_no)&&(bit_cont
state<= state_control;
one_bit_cont<= 'b0;
bit_cont<= bit_cont + 1'b1;
end else if (one_bit_cont
state<= state_control;
one_bit_cont<= one_bit_cont + 1'b1;
end else begin
state<= state_idle;
end
end
state_data:begin if ((one_bit_cont==bit_flag_no)&&(bit_cont==can_data_data_cont))begin
state<= state_crc;
one_bit_cont<= 'b0;
bit_cont<= 'b0;
data_en_flag <= 'b0;
cic_en_flag<= 'b1;
end else if ((one_bit_cont==bit_flag_no)&&(bit_cont
state<= state_data;
one_bit_cont<= 'b0;
bit_cont<= bit_cont + 1'b1;
end else if (one_bit_cont
state<= state_data;
one_bit_cont<= one_bit_cont + 1'b1;
end else begin
state<= state_idle;
end
end
state_crc:begin if ((one_bit_cont==bit_flag_no)&&(bit_cont==can_cic_data_cont))begin
state<= state_ack;
can_ack_out_low<= 'b0;
one_bit_cont<= 'b0;
bit_cont<= 'b0;
cic_en_flag<= 'b0;
end else if ((one_bit_cont==bit_flag_no)&&(bit_cont
state<= state_crc;
one_bit_cont<= 'b0;
bit_cont<= bit_cont + 1'b1;
end else if (one_bit_cont
state<= state_crc;
one_bit_cont<= one_bit_cont + 1'b1;
end else begin
state<= state_idle;
end
end
state_ack:begin if ((one_bit_cont==bit_flag_no)&&(bit_cont==1))begin
state<= state_eof;
can_ack_out_low<= 'b1;
one_bit_cont<= 'b0;
bit_cont<= 'b0;
end else if ((one_bit_cont==bit_flag_no)&&(bit_cont<1)) begin
state<= state_ack;
one_bit_cont<= 'b0;
bit_cont<= bit_cont + 1'b1;
end else if (one_bit_cont
state<= state_ack;
one_bit_cont<= one_bit_cont + 1'b1;
end else begin
state<= state_idle;
end
end
state_eof:begin if ((one_bit_cont==bit_flag_no)&&(bit_cont==5))begin
state<= state_end;
one_bit_cont<= 'b0;
bit_cont<= 'b0;
end else if ((one_bit_cont==bit_flag_no)&&(bit_cont<5)) begin
state<= state_eof;
one_bit_cont<= 'b0;
bit_cont<= bit_cont + 1'b1;
end else if (one_bit_cont
state<= state_eof;
one_bit_cont<= one_bit_cont + 1'b1;
end else begin
state<= state_idle;
end
end
state_end:begin
state<= state_idle;
one_bit_cont<= 'b0;
bit_cont<= 'b0;
id_en_flag<= 'b0;
contral_flag <= 'b0;
data_en_flag<= 'b0;
cic_en_flag <= 'b0;
can_rx_en_flag <= 'b0;
can_ack_out_low<= 'b1;
end
default:begin
state<= state_idle;
one_bit_cont<= 'b0;
bit_cont<= 'b0;
id_en_flag<= 'b0;
contral_flag <= 'b0;
data_en_flag<= 'b0;
cic_en_flag <= 'b0;
can_rx_en_flag <= 'b0;
can_ack_out_low<= 'b1;
end
endcase
end
//always @(posedge can_clk or negedge rst_n )begin
//if(rst_n==1'b0) begin
//error_data<= 'b0;
//end else if (can_rx_en_flag==1) begin
//error_data<= {error_data[9:0],can_rx};
//endelse if (one_bit_cont==11) begin
//can_rx_unen_flag<= 1'b0;
//end else if (can_rx_en_flag==0)
//can_rx_unen_flag<= 'b0;
//end
always @(posedge can_clk or negedge rst_n )begin
if(rst_n==1'b0) begin
can_continuity_data<= 5'b11111;
can_continuity_data_flag<= 'b0;
end else if ((one_bit_cont==9)&&(can_rx_en_flag==1)) begin
can_continuity_data<= {can_continuity_data[3:0],can_rx};
can_continuity_data_flag<= 'b0;
endelse if (((can_continuity_data==0)||(can_continuity_data==5'b11111))&&(one_bit_cont==10)&&(cic_en_flag==0)) begin
can_continuity_data_flag<= 'b1;
end else if (((can_continuity_data==0)||(can_continuity_data==5'b11111))&&(one_bit_cont==10)&&(cic_en_flag==1)&&(bit_cont<14)) begin
can_continuity_data_flag<= 'b1;
end else if (can_rx_en_flag==0) begin
can_continuity_data<= 5'b11111;
can_continuity_data_flag<= 'b0;
end else begin
can_continuity_data_flag<= 'b0;
end
end
always @(posedge can_clk or negedge rst_n )begin
if(rst_n==1'b0) begin
can_rx_unen_flag<= 'b0;
end else if ((can_rx_en_flag==1)&&(can_continuity_data_flag==1)&&(cic_en_flag==0)) begin
can_rx_unen_flag<= 1'b1;
end else if ((can_rx_en_flag==1)&&(can_continuity_data_flag==1)&&(cic_en_flag==1)&&(bit_cont<14)) begin
can_rx_unen_flag<= 1'b1;
end else if (one_bit_cont==11) begin
can_rx_unen_flag<= 1'b0;
end else if (can_rx_en_flag==0)
can_rx_unen_flag<= 'b0;
end
always @(posedge can_clk or negedge rst_n )begin
if(rst_n==1'b0) begin
can_id_data_cont<= 'd10;
end else if ((id_en_flag==1)&&(can_continuity_data_flag==1)) begin
can_id_data_cont<= can_id_data_cont+ 1'b1;
endelse if (id_en_flag==0)
can_id_data_cont<= 'd10;
end
always @(posedge can_clk or negedge rst_n )begin
if(rst_n==1'b0) begin
can_contral_data_cont<= 'd6;
end else if ((contral_flag==1)&&(can_continuity_data_flag==1)) begin
can_contral_data_cont<= can_contral_data_cont+ 1'b1;
endelse if (contral_flag==0)
can_contral_data_cont<= 'd6;
end
always @(posedge can_clk or negedge rst_n )begin
if(rst_n==1'b0) begin
can_data_data_cont<= 'd63;
end else if ((data_en_flag==1)&&(can_continuity_data_flag==1)) begin
can_data_data_cont<= can_data_data_cont+ 1'b1;
endelse if (data_en_flag==0)
can_data_data_cont<= 'd63;
end
always @(posedge can_clk or negedge rst_n )begin
if(rst_n==1'b0) begin
can_cic_data_cont<= 'd15;
end else if ((cic_en_flag==1)&&(can_continuity_data_flag==1)) begin
can_cic_data_cont<= can_cic_data_cont+ 1'b1;
end else if (cic_en_flag==0)
can_cic_data_cont<= 'd15;
end
///
always @(posedge can_clk or negedge rst_n )begin
if(rst_n==1'b0) begin
can_id_out<= 'b0;
end else if ((one_bit_cont==9)&&(id_en_flag==1)&&(can_rx_unen_flag==0)) begin
can_id_out<= {can_id_out[9:0],can_rx};
end
end
always @(posedge can_clk or negedge rst_n )begin
if(rst_n==1'b0) begin
can_id_out_en<= 'b0;
end else if ((one_bit_cont==9)&&(bit_cont==can_id_data_cont)&&(id_en_flag==1)) begin
can_id_out_en<= 1'b1;
endelse
can_id_out_en<= 'b0;
end
always @(posedge can_clk or negedge rst_n )begin
if(rst_n==1'b0) begin
can_data_out<= 'b0;
end else if ((one_bit_cont==9)&&(data_en_flag==1)&&(can_rx_unen_flag==0)) begin
can_data_out<= {can_data_out[62:0],can_rx};
end
end
always @(posedge can_clk or negedge rst_n )begin
if(rst_n==1'b0) begin
can_data_out_en<= 'b0;
end else if ((bit_cont==can_data_data_cont)&&(one_bit_cont==9)&&(data_en_flag==1)) begin
can_data_out_en<= 1'b1;
endelse
can_data_out_en<= 'b0;
end
/
endmodule
在完成上述代碼編寫(xiě)后通過(guò)CAN收發(fā)器發(fā)送數(shù)據(jù)然后利用chipscop進(jìn)行數(shù)據(jù)的抓取。
數(shù)據(jù)發(fā)送如下圖所示:
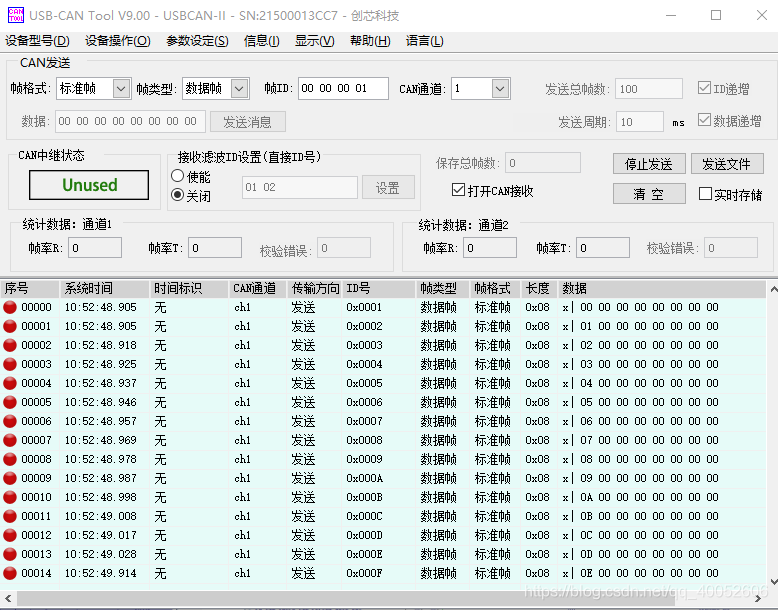
對(duì)上述代碼測(cè)試時(shí)抓取到數(shù)據(jù)波形如下圖:
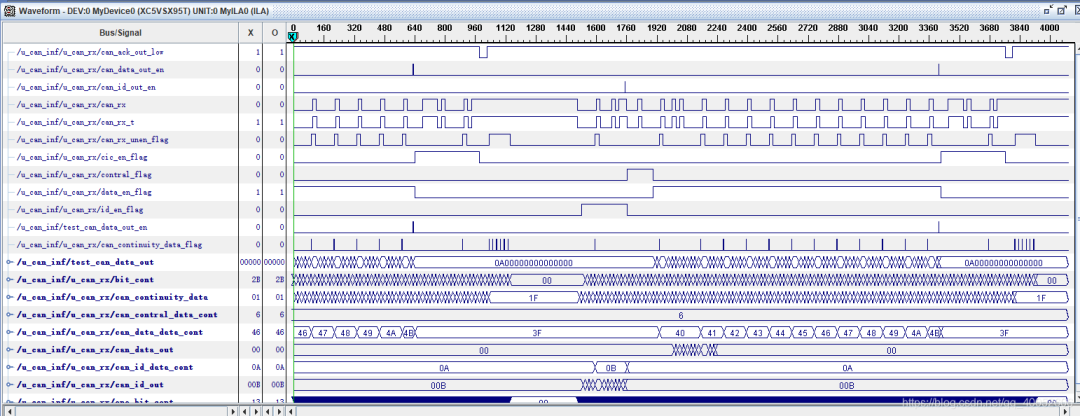
從圖中可以看出接收了一包完整的標(biāo)準(zhǔn)數(shù)據(jù)幀。在通過(guò)CAN調(diào)試工具進(jìn)行數(shù)據(jù)的發(fā)送測(cè)試時(shí):CAN調(diào)試工具每秒發(fā)送60包,測(cè)試了一個(gè)小時(shí),沒(méi)有出現(xiàn)接收數(shù)據(jù)錯(cuò)誤。
然而在實(shí)現(xiàn)CAN通信時(shí)在滿足一般的代碼編寫(xiě)的情況下有兩點(diǎn)需要特別的注意:
1、CAN2.0的協(xié)議規(guī)定,連續(xù)5個(gè)顯性/隱性電平后,要填充一位隱性/顯性電平。
2、在can協(xié)議中將CAN_H和CAN_L的差值為高電平時(shí)定義為顯性,邏輯上表示為0,為低電平時(shí)定義為隱形,邏輯上表示為1。
原文標(biāo)題:FPGA實(shí)現(xiàn)CAN通信
文章出處:【微信公眾號(hào):FPGA設(shè)計(jì)論壇】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
-
FPGA
+關(guān)注
關(guān)注
1644文章
21993瀏覽量
615449 -
CAN
+關(guān)注
關(guān)注
57文章
2901瀏覽量
467057 -
物理層
+關(guān)注
關(guān)注
1文章
154瀏覽量
34960
原文標(biāo)題:FPGA實(shí)現(xiàn)CAN通信
文章出處:【微信號(hào):gh_9d70b445f494,微信公眾號(hào):FPGA設(shè)計(jì)論壇】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
Labview用在通信物理層可以做那些事?
CAN總線不同的物理層
如何對(duì)CAN物理層進(jìn)行調(diào)試?
淺析串口通訊協(xié)議的物理層和協(xié)議層
IIC物理層是由哪些部分組成的
從物理層和協(xié)議層兩方面來(lái)了解I2C總線
串口通信的物理層與協(xié)議層的相關(guān)資料推薦
CSA7000系列通信信號(hào)分析儀在網(wǎng)絡(luò)通信物理層測(cè)試領(lǐng)域中的
物理層的作用
WLAN物理層關(guān)鍵通信技術(shù)

如何搞定通信物理層?物理層包含哪些內(nèi)容?如何落地實(shí)現(xiàn)呢?
CAN XL物理層揭秘(下):物理層組合與兼容性





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論