") 一個機(jī)器人操縱系統(tǒng)的框架—— DiffSkill
一個機(jī)器人操縱系統(tǒng)的框架—— DiffSkill
對于人類來說,把面團(tuán)放到砧板上,然后用搟面杖把它壓平成圓形。這看起來很容易,對吧?
那如果是由機(jī)器人來操作,會是怎樣的效果?
對于機(jī)器人來說,面對像面團(tuán)這樣的可變形物體是很棘手的,因?yàn)槊鎴F(tuán)的形狀可以以多種方式變化,而這些變化很難用方程式來表示。
此外,從面團(tuán)中創(chuàng)建新形狀需要多個步驟并使用不同的工具。這就意味著機(jī)器人需要學(xué)習(xí)一系列長長的操作任務(wù),然后還需要通過反復(fù)試驗(yàn)更多可能的選擇。
現(xiàn)在,來自,麻省理工學(xué)院、卡內(nèi)基梅隆大學(xué)和加州大學(xué)圣地亞哥分校的研究人員創(chuàng)建了一個框架,可以讓機(jī)器人快速有效地完成復(fù)雜的操作任務(wù),例如揉面皮包餃子、做披薩。
▍一個機(jī)器人操縱系統(tǒng)的框架—— DiffSkill
研究人員為使用兩階段學(xué)習(xí)過程的機(jī)器人操作系統(tǒng)創(chuàng)建了一個框架,這可以使機(jī)器人能夠在很長一段時間內(nèi)執(zhí)行復(fù)雜的面團(tuán)操作任務(wù)。
這個算法會像“老師”一樣解決機(jī)器人完成任務(wù)必須采取的每一步。然后訓(xùn)練一個“學(xué)生”機(jī)器學(xué)習(xí)在什么時間段以及如何執(zhí)行任務(wù)期間所需的每項(xiàng)技能的抽象概念,例如使用搟面杖。

有了這些知識,系統(tǒng)就會推理出如何執(zhí)行技能來完成整個任務(wù)。
一系列操作,堪稱“手把手教學(xué)”。
研究人員表明,這種他們稱之為 DiffSkill 的方法可以在模擬中執(zhí)行復(fù)雜的操作任務(wù),例如切割和攤開面團(tuán),或從砧板周圍收集面團(tuán),同時優(yōu)于其他機(jī)器學(xué)習(xí)方法。
當(dāng)然,除了包餃子、做披薩之外,這種方法還可以應(yīng)用于其他需要機(jī)器人操縱的可變形物體的環(huán)境。
例如為老年人或運(yùn)動障礙者喂食、洗澡或穿衣的護(hù)理機(jī)器人。
“這種方法更接近我們?nèi)祟愑?jì)劃行動的方式。當(dāng)一個人執(zhí)行一項(xiàng)長期任務(wù)時,我們并沒有寫下所有的細(xì)節(jié)。我們有一個更高級別的計(jì)劃者,它大致告訴我們在此過程中需要實(shí)現(xiàn)哪些階段以及一些中間目標(biāo),然后我們執(zhí)行它們,”計(jì)算機(jī)科學(xué)與人工智能專業(yè)的研究生Li表示。
▍“學(xué)生”&“老師” 的工作流程
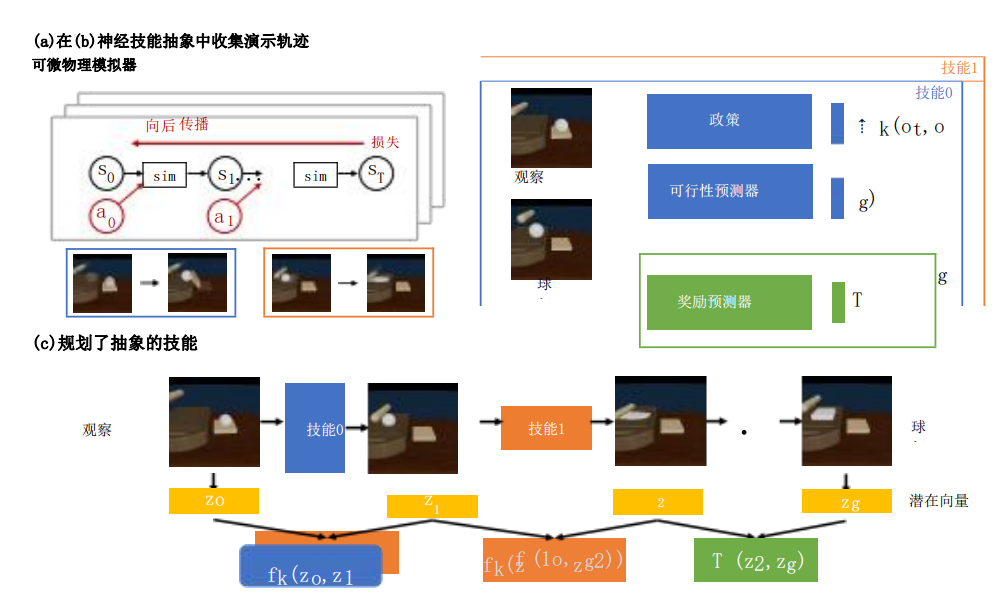
DiffSkill 框架中的“老師”是一種軌跡優(yōu)化算法,可以解決物體初始狀態(tài)和目標(biāo)位置靠得很近的短視界任務(wù)。
軌跡優(yōu)化器在模擬現(xiàn)實(shí)世界物理的模擬器中工作(稱為可微物理模擬器,它將“Diff”放入“DiffSkill”中)。然后,“老師”算法使用模擬器中的信息來學(xué)習(xí)面團(tuán)在每個階段必須如何移動,一次一個,然后輸出這些軌跡。
然后“學(xué)生”神經(jīng)網(wǎng)絡(luò)學(xué)會模仿老師的動作。作為輸入,它使用兩個攝像頭圖像,一個顯示當(dāng)前狀態(tài)的面團(tuán),另一個顯示任務(wù)結(jié)束時的面團(tuán)。神經(jīng)網(wǎng)絡(luò)生成一個高級計(jì)劃,以確定如何將不同的技能聯(lián)系起來以達(dá)到目標(biāo)。然后,它為每個技能生成特定的、短視界的軌跡,并將命令直接發(fā)送到工具。
接著,研究人員使用這種技術(shù)對三種不同的模擬面團(tuán)操作任務(wù)進(jìn)行了實(shí)驗(yàn)。
在一項(xiàng)任務(wù)中,機(jī)器人使用抹刀將面團(tuán)舉到砧板上,然后使用搟面杖將其壓平。在另一個例子中,機(jī)器人使用抓手從柜臺上收集面團(tuán),將其放在抹刀上,然后將其轉(zhuǎn)移到砧板上。
在第三個任務(wù)中,機(jī)器人用刀將一堆面團(tuán)切成兩半,然后用夾具將每一塊面團(tuán)運(yùn)送到不同的位置。

同時,研究人員開發(fā)了一種機(jī)器人操縱系統(tǒng),可以在模擬中使用工具執(zhí)行復(fù)雜的面團(tuán)操作任務(wù)。
例如收集面團(tuán)并將其放在砧板上(左),將一塊面團(tuán)切成兩半并將兩半分開(中),以及將面團(tuán)抬到一塊砧板,然后用搟面杖將其壓平(右)。
實(shí)驗(yàn)結(jié)果證明,DiffSkill 框架能夠勝過依賴強(qiáng)化學(xué)習(xí)的流行技術(shù)。在強(qiáng)化學(xué)習(xí)中,機(jī)器人通過反復(fù)試驗(yàn)來學(xué)習(xí)任務(wù)。
事實(shí)上,DiffSkill 是唯一能夠成功完成所有三個面團(tuán)操作任務(wù)的方法。有趣的是,研究人員發(fā)現(xiàn)“學(xué)生”神經(jīng)網(wǎng)絡(luò)甚至能夠勝過“教師”算法,Lin 說。
“我們的框架為機(jī)器人獲得新技能提供了一種新穎的方式。然后可以將這些技能鏈接起來,以解決更復(fù)雜的任務(wù),這些任務(wù)超出了以前的機(jī)器人系統(tǒng)的能力,”Li說。
因?yàn)樗麄兊姆椒▊?cè)重于控制工具(抹刀、刀、搟面杖等),所以它可以應(yīng)用于不同的機(jī)器人,但前提是它們使用研究人員定義的特定工具。
未來,他們計(jì)劃將工具的形狀集成到“學(xué)生”網(wǎng)絡(luò)的推理中,以便將其應(yīng)用于其他設(shè)備。
該團(tuán)隊(duì)的研究人員們打算通過使用 3D 數(shù)據(jù)作為輸入來提高 DiffSkill 的性能,同時,他們還希望使神經(jīng)網(wǎng)絡(luò)規(guī)劃過程更高效,并收集更多樣的訓(xùn)練數(shù)據(jù),以增強(qiáng) DiffSkill 對新情況的泛化能力。
從長遠(yuǎn)來看,他們希望將 DiffSkill 應(yīng)用到更多樣化的任務(wù)中,包括布料操作。
這項(xiàng)研究得到了美國國家科學(xué)基金會、LG電子、麻省理工學(xué)院-IBM 沃森人工智能實(shí)驗(yàn)室、美國海軍研究辦公室和國防高級研究計(jì)劃局的部分支持。
文章及論文地址:
https://news.mit.edu/2022/robotic-deformable-object-0331
審核編輯 :李倩
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29551瀏覽量
211854 -
MIT
+關(guān)注
關(guān)注
3文章
254瀏覽量
24275 -
機(jī)器學(xué)習(xí)
+關(guān)注
關(guān)注
66文章
8495瀏覽量
134194
原文標(biāo)題:搟面皮包餃子做披薩,MIT、CMU等的研究員讓機(jī)器人自己學(xué)會了!
文章出處:【微信號:WW_CGQJS,微信公眾號:傳感器技術(shù)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論