") 如何整定卡爾曼濾波的Q、R這兩個(gè)參數(shù)
如何整定卡爾曼濾波的Q、R這兩個(gè)參數(shù)

一個(gè)關(guān)于卡爾曼濾波的問(wèn)題,之前用的互補(bǔ)濾波效果也還好,但在用卡爾曼濾波的時(shí)候出現(xiàn)了一些問(wèn)題:就是如何整定卡爾曼濾波的Q、R這兩個(gè)參數(shù),這兩個(gè)參數(shù)分別是角度數(shù)據(jù)置信度與角速度數(shù)據(jù)置信度。我看別人用的這兩個(gè)參數(shù)都非常小,比如別人Q都是零點(diǎn)零零幾,而用的時(shí)候發(fā)現(xiàn)Q零點(diǎn)幾跟隨效果很差,我把Q調(diào)到1跟隨效果才差不多。但是Q和R不都是協(xié)方差嗎,它們可以取到1及以上的值嗎?即Q和R有沒(méi)有取值范圍,以及這兩個(gè)參數(shù)整定方法是什么?
回復(fù):Kalman濾波算法常常被用來(lái)計(jì)算直立車(chē)模傾角和轉(zhuǎn)動(dòng)角速度。算法利用陀螺儀給出的轉(zhuǎn)速度量和加速度傳感器給出的傾角觀(guān)測(cè)量完成計(jì)算。除了Kalman濾波器算法之外,還可以使用互補(bǔ)濾波器進(jìn)行幫助計(jì)算。
如果不考慮系統(tǒng)狀態(tài)的時(shí)變性和系統(tǒng)噪聲的時(shí)變性,上述兩種方法本質(zhì)上是相同的。
下圖顯示了對(duì)于被測(cè)物體位置使用Kalman濾波算法來(lái)估計(jì)物體實(shí)際位置的示意圖。
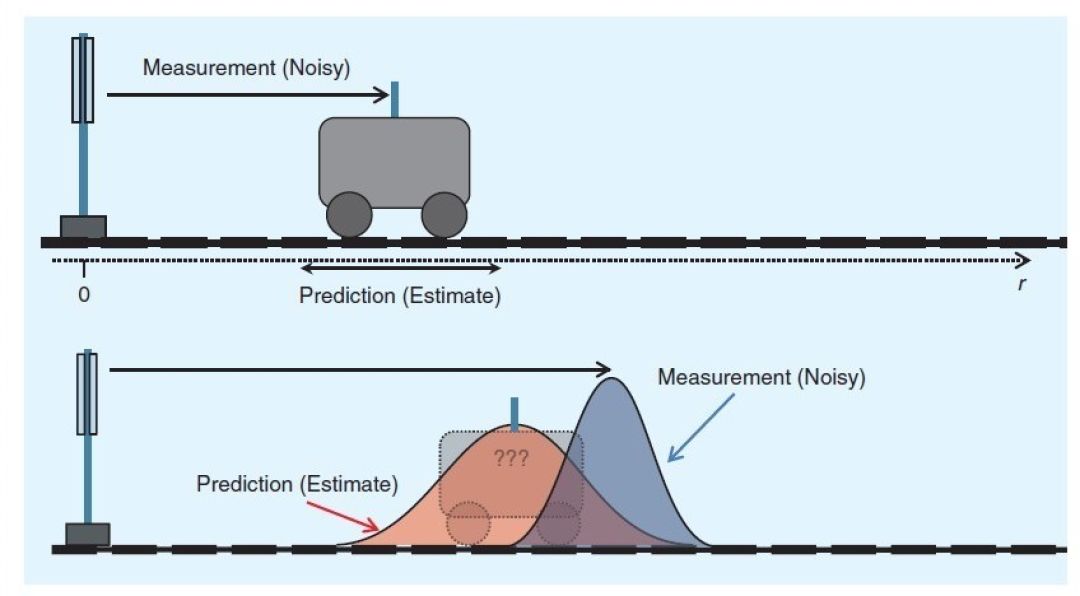
通常情況下所使用的Kalman濾波器是離散時(shí)間系統(tǒng)形式的。我們真正想得到的物理量表示成系統(tǒng)狀態(tài)中的某些分量。對(duì)于系統(tǒng)狀態(tài)的估計(jì)(濾波結(jié)果)所使用的信息來(lái)源于兩個(gè)方面,一個(gè)是對(duì)系統(tǒng)狀態(tài)演變模型的了解,包括系統(tǒng)轉(zhuǎn)移矩陣和輸入控制矩陣,輸入孔質(zhì)量等,另一方面來(lái)自于對(duì)系統(tǒng)狀態(tài)的觀(guān)測(cè)量。
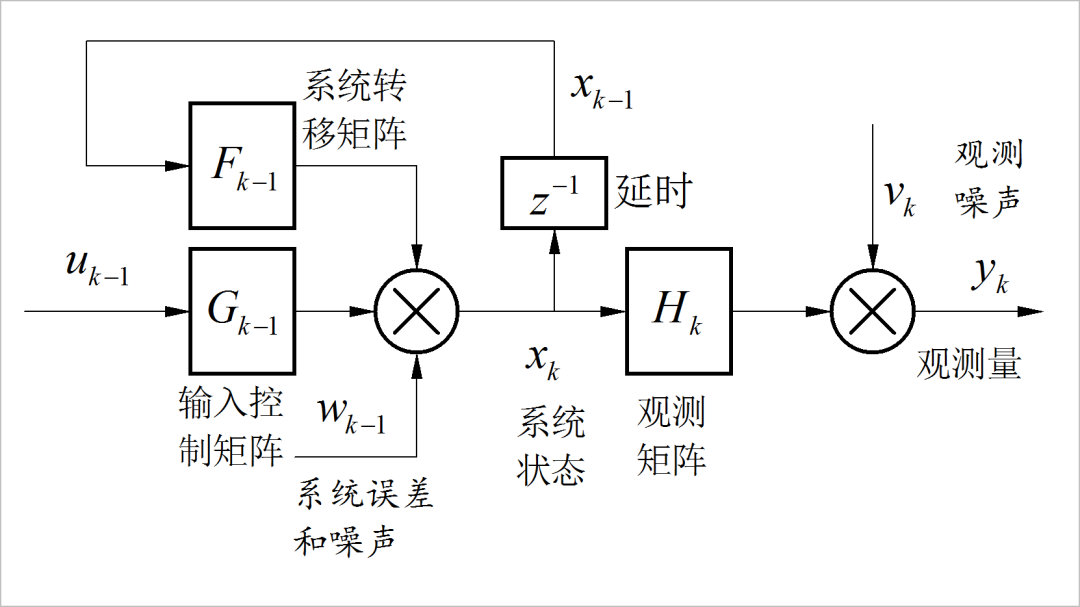
但這兩方面的信息都會(huì)有某種不確定性。通常使用系統(tǒng)噪聲向量(W)和觀(guān)測(cè)噪聲向量(V)來(lái)表示。兩個(gè)噪聲大小分別使用它們各自的協(xié)方差矩陣來(lái)表示。系統(tǒng)噪聲協(xié)方差矩陣使用Q,觀(guān)測(cè)噪聲的協(xié)方差矩陣使用R。
下面是系統(tǒng)方程和觀(guān)測(cè)方程表達(dá)式。雖然在表達(dá)式中包括了系統(tǒng)噪聲w和轉(zhuǎn)測(cè)噪聲v,但在計(jì)算系統(tǒng)狀態(tài)轉(zhuǎn)移和系統(tǒng)觀(guān)測(cè)量的時(shí)候并不考慮這兩個(gè)噪聲的影響。
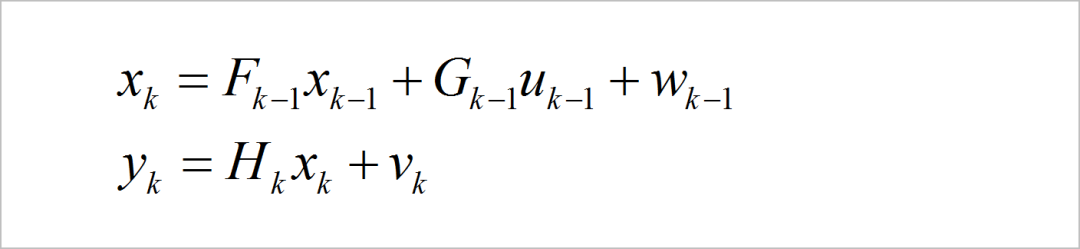
兩個(gè)噪聲的影響只是在卡爾曼濾波器離散迭代算法過(guò)程中使用到了兩個(gè)噪聲的協(xié)方差矩陣Q和R。分別用于計(jì)算系統(tǒng)狀態(tài)估計(jì)誤差的協(xié)方差矩陣P和卡爾曼濾波器增益K的大小。
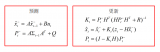
下面是傳統(tǒng)線(xiàn)性卡爾曼濾波器的五個(gè)基本迭代公式。
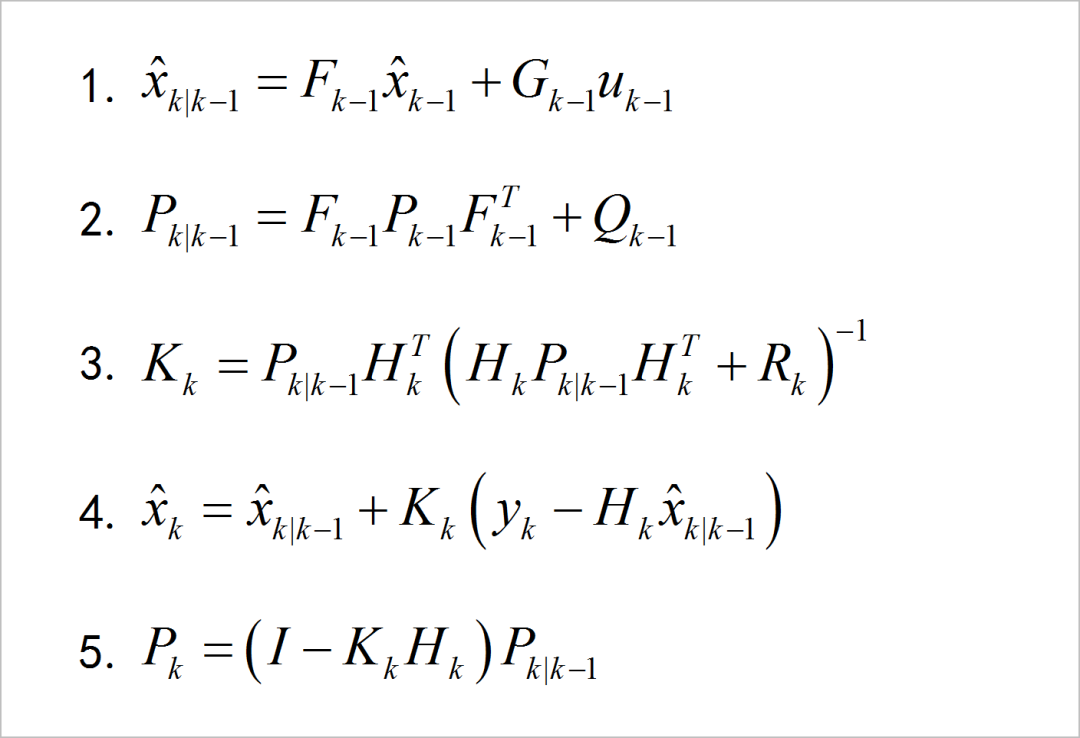
從上面公式來(lái)看,真正所要濾波得到的結(jié)果來(lái)自于公式(4)中的系統(tǒng)狀態(tài)估計(jì)值x的某些分量,公式(4)的結(jié)果是由公式(1)所得到的狀態(tài)預(yù)測(cè)值和來(lái)自觀(guān)測(cè)量y計(jì)算得到的。其中卡爾曼濾波器增益K是在狀態(tài)預(yù)測(cè)值和觀(guān)測(cè)誤差值之間做了一個(gè)折中。
如果K很小,比如等于0,則濾波結(jié)果更加接近由系統(tǒng)狀態(tài)估計(jì)值給出的遞歸結(jié)果;如果K很大,比如等于1,則濾波結(jié)果更加接近于觀(guān)測(cè)值所反算出來(lái)的狀態(tài)變量。
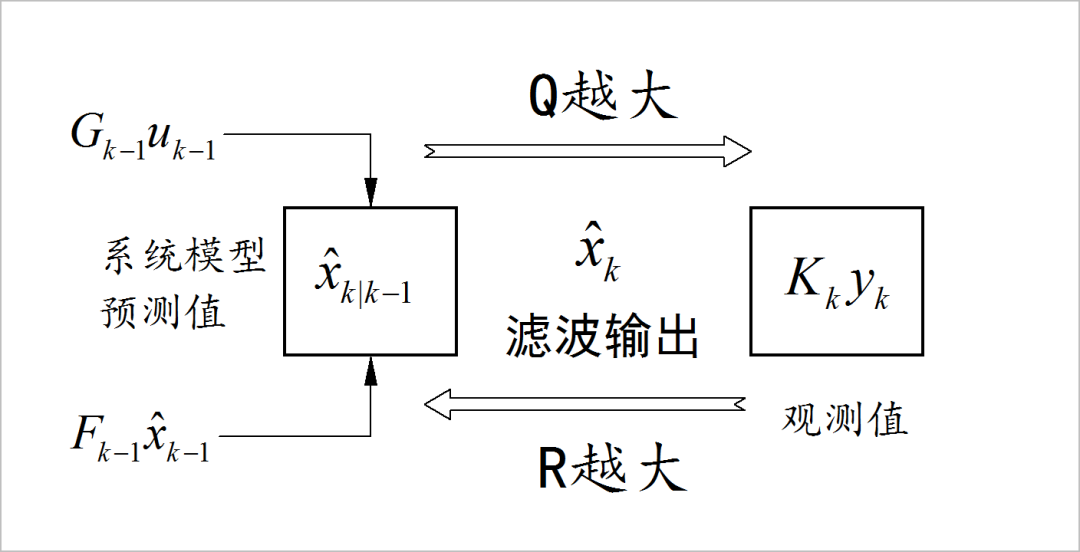
K值是由公式(3)計(jì)算獲得,其中的P值是通過(guò)公式(2)(5)進(jìn)行計(jì)算,反映了Q的大小,因此K值的大小可以由如下形式示意:
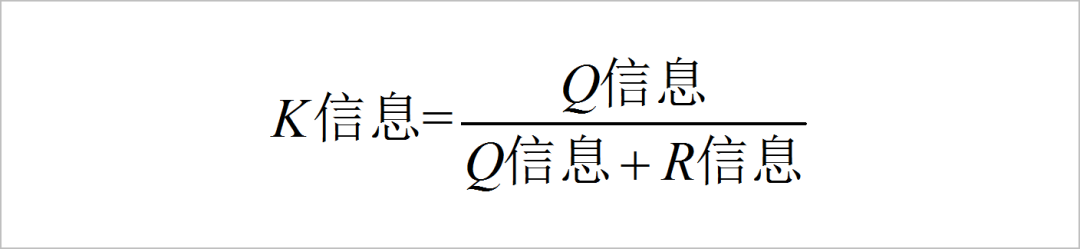
因此,K值至于Q,R的比值有關(guān)系,而與Q,R的絕對(duì)值沒(méi)有關(guān)系。所以,在不同算法中,R, Q的取值根據(jù)反應(yīng)的不同量綱,可以有很大的變化,但它們的比值會(huì)決定了濾波值應(yīng)該更多來(lái)自于系統(tǒng)模型演化的信息,還是來(lái)自于觀(guān)察信號(hào)信息。
在智能車(chē)競(jìng)賽中,使用Kalman濾波器將慣性傳感器所得到的車(chē)體陀螺儀所反映的角速度和和加速度傳感器所獲得的傾斜角信息進(jìn)行融合,獲得直立車(chē)模傾角和轉(zhuǎn)動(dòng)角速度。
此時(shí),往往將系統(tǒng)狀態(tài)x設(shè)定為車(chē)模需要觀(guān)察的角度。系統(tǒng)輸入量u為測(cè)量所得到的角速度;系統(tǒng)觀(guān)察值設(shè)定為有加速度傳感器給出的傾角。
系統(tǒng)模型噪聲w應(yīng)該反映出陀螺儀測(cè)定角速度的隨機(jī)誤差和隨著時(shí)間漂移的系統(tǒng)誤差兩部分。系統(tǒng)觀(guān)測(cè)噪聲v應(yīng)該反映了加速度計(jì)輸出量中在計(jì)算角度的近似誤差和由于車(chē)模運(yùn)動(dòng)所產(chǎn)生的干擾噪聲。
如果Q大R小,造成K增加,則濾波結(jié)果中就會(huì)存在較大的由于車(chē)模運(yùn)動(dòng)所產(chǎn)生的噪聲,俗稱(chēng)跟蹤不好;如果Q小R大,造成K減小,則濾波結(jié)果會(huì)出現(xiàn)兩種問(wèn)題,第一就是從處置值收斂到正確值的過(guò)程較慢,需要等一個(gè)比較長(zhǎng)的穩(wěn)定時(shí)間。另一方面就是會(huì)受到陀螺儀本身零點(diǎn)漂移,產(chǎn)生比較大的輸出零點(diǎn)誤差。
最終這兩個(gè)參數(shù)的大小可以根據(jù)所選擇的器件的實(shí)際性能(噪聲,漂移等)通過(guò)實(shí)驗(yàn)觀(guān)察的方式獲得一個(gè)比較好的相對(duì)值。
審核編輯 :李倩
-
濾波器
+關(guān)注
關(guān)注
162文章
8138瀏覽量
182127 -
算法
+關(guān)注
關(guān)注
23文章
4710瀏覽量
95420 -
Kalman
+關(guān)注
關(guān)注
0文章
11瀏覽量
8303
原文標(biāo)題:卡爾曼濾波器中的Q,R
文章出處:【微信號(hào):mcu168,微信公眾號(hào):硬件攻城獅】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
雙電機(jī)同步驅(qū)動(dòng)系統(tǒng)控制參數(shù)整定研究
ADS1298IPAGR帶有RESP_MODP和RESP_MODN這兩個(gè)管腳嗎?
卡爾曼濾波基礎(chǔ)知識(shí)
卡爾曼濾波在信號(hào)處理中的應(yīng)用分析
卡爾曼濾波在圖像處理中的應(yīng)用實(shí)例 如何調(diào)優(yōu)卡爾曼濾波參數(shù)
ADC122S021 clock frequency和fSCLK,這兩個(gè)參數(shù)有什么區(qū)別呢?
卡爾曼濾波器的特性及仿真






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論