") 數(shù)字孿生技術(shù)在自動駕駛測試領(lǐng)域的應(yīng)用
數(shù)字孿生技術(shù)在自動駕駛測試領(lǐng)域的應(yīng)用
摘要:
研究數(shù)字孿生技術(shù)在自動駕駛測試領(lǐng)域的應(yīng)用。旨在構(gòu)建高度開放的數(shù)字孿生自動駕駛測試平臺,結(jié)合仿真測試工具、通信設(shè)備、真實測試車輛等功能單元,形成豐富的測試驗證環(huán)境,支持各類自動駕駛解決方案和算法驗證測試,具備在有限資源條件下開展虛擬復(fù)雜場景的自動駕駛實車測試驗證能力。提供一種全新的自動駕駛整車測試方法。
1.數(shù)字孿生技術(shù)介紹
1.1 數(shù)字孿生概念介紹
數(shù)字孿生(digital twin)的概念最初由Grieves教授于2003年在美國密歇根大學(xué)的產(chǎn)品全生命周期管理課程上提出[1],并被定義為三維模型,包括實體產(chǎn)品、虛擬產(chǎn)品以及二者間的連接。全球著名的IT研究與顧問咨詢公司Gartner連續(xù)兩年 (2016年和2017年)將數(shù)字?jǐn)伾袨楫?dāng)年十大戰(zhàn)略科技發(fā)展趨勢之一[2],2017年12月8日中國科協(xié)智能制造學(xué)會聯(lián)合體在世界智能制造大會上將數(shù)字孿生列為了世界智能制造十大科技進(jìn)展之一。
數(shù)字孿生的宏觀概念是指:是現(xiàn)有或?qū)⒂械奈锢韺嶓w對象的數(shù)字模型,通過實測、仿真和數(shù)據(jù)分析來實時感知、診斷、預(yù)測物理實體對象的狀態(tài),通過優(yōu)化和指令來調(diào)控物理實體對象的行為,通過相關(guān)數(shù)字模型間的相互學(xué)習(xí)來進(jìn)化自身,同時改進(jìn)利益相關(guān)方在物理實體對象生命周期內(nèi)的決策。[1]
總結(jié)上述定義的理解要點為:數(shù)字孿生是仿真應(yīng)用的延伸和發(fā)展,不僅僅是物理世界的鏡像,也要接受物理世界的實時信息,更要反過來實時驅(qū)動物理世界。
本文結(jié)合自動駕駛測試,給出數(shù)字孿生在自動駕駛測試中的狹義定義:車輛處于真實的測試場地環(huán)境當(dāng)中,同時將車輛通過數(shù)字通信等技術(shù),建模映射到虛擬空間內(nèi),之后在虛擬空間內(nèi)通過構(gòu)建不同的復(fù)雜交通環(huán)境,將有關(guān)信號通過仿真器進(jìn)行仿真生成,然后發(fā)送給實際道路中的車輛。車輛接收到信號之后,對信號進(jìn)行分析判斷,進(jìn)而決策規(guī)劃到形成控制信號發(fā)送到底盤,執(zhí)行控制動作,車輛動作反饋回虛擬空間,從而達(dá)到對自車的決策規(guī)劃和控制執(zhí)行系統(tǒng)的考核能力。
1.2 數(shù)字孿生技術(shù)的主流應(yīng)用
根據(jù)數(shù)字孿生技術(shù)的廣義定義,其不僅是映射物理世界,更需要接收物理世界的反饋信息,進(jìn)而反過來驅(qū)動物理世界。這個過程的應(yīng)用程度即數(shù)字孿生技術(shù)應(yīng)用的成熟度,對應(yīng)“數(shù)化、互動、先知、先覺、共智”。[1]
數(shù)字孿生的概念最早應(yīng)用于航空航天領(lǐng)域,美國國防部最早提出將數(shù)字孿生技術(shù)用于航空航天飛行器的健康維護(hù)與保障。首先在數(shù)字空間建立真實飛機(jī)的模型,并通過傳感器實現(xiàn)與飛機(jī)真實狀態(tài)完全同步,這樣每次飛行后,根據(jù)結(jié)構(gòu)現(xiàn)有情況和過往載荷,及時分析評估是否需要維修,能否承受下次的任務(wù)載荷等,示意如圖1。
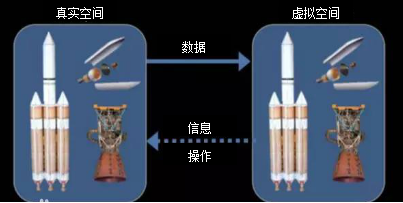
圖1航天數(shù)字孿生模型示意
數(shù)字孿生技術(shù)在工業(yè)4.0體系中扮演著重要的角色,主要應(yīng)用包括“產(chǎn)品數(shù)字化孿生”、“生產(chǎn)工藝流程數(shù)字化孿生”和“設(shè)備數(shù)字化孿生”。在數(shù)字孿生技術(shù)驅(qū)動下 ,將傳統(tǒng)的預(yù)測性維護(hù)方法由被動響應(yīng)轉(zhuǎn)型為主動服務(wù)的轉(zhuǎn)變過程,為中國制造業(yè)由“生產(chǎn)型制造”向“服務(wù)型制造”轉(zhuǎn)變提供支撐。[3]
數(shù)字孿生技術(shù)的虛實結(jié)合特性在智能網(wǎng)聯(lián)領(lǐng)域的應(yīng)用日趨廣泛,主要包括智能網(wǎng)聯(lián)汽車開發(fā)制造、智能工廠平臺等工業(yè)應(yīng)用和數(shù)字孿生自動駕駛測試應(yīng)用。其中,在開發(fā)制造領(lǐng)域,數(shù)字孿生技術(shù)應(yīng)用形式主要是產(chǎn)品設(shè)計建模、智慧生產(chǎn)線設(shè)計運(yùn)行等方面。
2.自動駕駛測試評價方法分析
自動駕駛汽車行業(yè)發(fā)展迅速,但其開發(fā)階段的產(chǎn)品驗證方法仍然與現(xiàn)有傳統(tǒng)汽車保持很大程度的一致。其測試方法主要有:軟/硬件在環(huán)測試、封閉場地測試、開放道路測試。三種方法各有優(yōu)劣,任意一個部分并不能很好的保證測試效果。未來對自動駕駛汽車的檢驗檢測將會是軟硬件在環(huán)+封閉場地測試+實車路試驗有機(jī)結(jié)合的模式。
現(xiàn)有測試方法的優(yōu)劣對比分析如下表1。
表1 測試評價方法優(yōu)劣分析
| 方法 | 軟/硬件在環(huán)測試 | 封閉場地測試 | 開放道路測試 |
| 對象 | 軟件、部件、虛擬環(huán)境 | 實車、實路、假參與者 | 實車、實路、實參與者 |
| 優(yōu)勢 | 針對部件進(jìn)行單獨(dú)驗證; 豐富、可重復(fù)的場景; 測試效率高; | 真實的道路和車輛動作; 場景可重復(fù)測試; 安全可控; |
無線豐富的真實場景; 真實交通參與者; 貼合實際使用; |
| 劣勢 | 依賴動力學(xué)模型; 無法驗證車輛執(zhí)行能力; | 測試場景數(shù)量有限; 場地共用性、可升級性差; | 路況不可控,安全風(fēng)險大; 大量時間和成本投入; 可重復(fù)性差; |
隨著自動駕駛汽車技術(shù)不斷發(fā)展、交通場景日益復(fù)雜,如上現(xiàn)有測試方法在自動駕駛測試實踐中顯現(xiàn)出不足,具體表現(xiàn)在如下幾點:
1)測試場景碎片化不符合實際使用情況。汽車自動駕駛是一個連續(xù)行為,貼合實際使用的驗證必須需要廣闊的空間開展連續(xù)場景驗證,若在真實物理空間中實現(xiàn),花費(fèi)的成本與時間不可接受;
2)復(fù)雜交通場景搭建的難度大、成本高、安全風(fēng)險大,如隧道、多車沖突、預(yù)期功能安全場景等;
3)軟硬件在環(huán)測試依賴車輛動力學(xué)模型,模型難以復(fù)現(xiàn)真實車輛動力學(xué),其精度對測試有較大影響;
4)真實封閉場地建設(shè)成本高,且建成后不能適應(yīng)自動駕駛技術(shù)快速變化的測試需求;
5)開放道路中的交通參與物、交通流等不易復(fù)現(xiàn),不便開展大量的重復(fù)測試;
數(shù)字孿生技術(shù)在自動駕駛汽車測試領(lǐng)域具備其特殊的應(yīng)用價值,可解決現(xiàn)有測試方法的不足,現(xiàn)就數(shù)字孿生技術(shù)如何在自動駕駛測試評價領(lǐng)域應(yīng)用提出一種可行方案。
3.數(shù)字孿生自動駕
駛測試評價方法研究
基于數(shù)字孿生技術(shù)的自動駕駛測試評價方法,核心在于數(shù)字孿生技術(shù),其關(guān)鍵特點是“虛實結(jié)合”,將真實車輛動力學(xué)和虛擬復(fù)雜交通場景緊密聯(lián)系,并在測試過程中實時交互,即時生成評價結(jié)果。
此種方法相比上述現(xiàn)有測試方法,其優(yōu)勢在于:
1)場景設(shè)置連續(xù)且可定制,貼合實際使用的連續(xù)行駛場景;
2)可實現(xiàn)復(fù)雜場景的快速搭建和自動駕駛測試,節(jié)約場地建設(shè)成本;
3)不需要動力學(xué)模型,基于實際路面和車輛動態(tài)進(jìn)行評價,測試結(jié)果更貼合實際;
4)所有測試基于數(shù)字試驗場,可快速適應(yīng)自動駕駛技術(shù)升級帶來的新的測試需求;
5)測試效率高、場景可復(fù)現(xiàn)、可拓展性好,可平臺上云實現(xiàn)海量仿真測試;
現(xiàn)從方案框架體系、硬件方案、關(guān)鍵難點、應(yīng)用預(yù)期四個方面對此方案進(jìn)行介紹。
3.1 方案體系框架
概念方案從數(shù)字孿生技術(shù)“虛實結(jié)合”的關(guān)鍵特點出發(fā),主要包含數(shù)字孿生體、測試開展、評價等三個維度,構(gòu)成數(shù)字孿生自動駕駛測試評價體系的主線,如下圖2。
數(shù)字孿生落地應(yīng)用的首要任務(wù)是創(chuàng)建應(yīng)用對象的數(shù)字孿生模型[4],即形成數(shù)字孿生體。其構(gòu)建及實時信息交互是本方案的關(guān)鍵,需要將現(xiàn)實世界中的試驗場地、試驗對象、測試場景等數(shù)字化,形成孿生的數(shù)字試驗場、數(shù)字試驗對象、數(shù)字測試場景,使兩者成為互通的數(shù)字孿生體。
測試的工作機(jī)理:數(shù)字被測對象與真實被測對象孿生對應(yīng)并受真實被測對象驅(qū)動→數(shù)字測試場景下發(fā)給真實被測對象→真實被測對象的決策執(zhí)行動作回傳給數(shù)字被測對象→數(shù)字被測對象在數(shù)字測試場內(nèi)完成動作→在數(shù)字測試場中采集數(shù)據(jù)并完成測試評價。
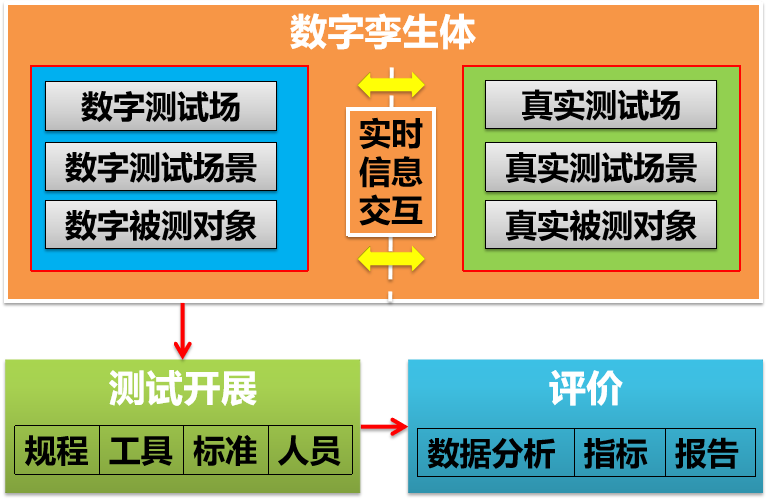
圖2 數(shù)字孿生測試評價體系概念圖
為實現(xiàn)上述數(shù)字孿生自動駕駛測試概念,對其體系構(gòu)成進(jìn)行如下設(shè)計,詳細(xì)如下圖3。主要包含數(shù)字孿生測試設(shè)備(仿真平臺、數(shù)據(jù)下發(fā)和采集設(shè)備)、真實被測對象、評價分析、展示平臺4大部分。
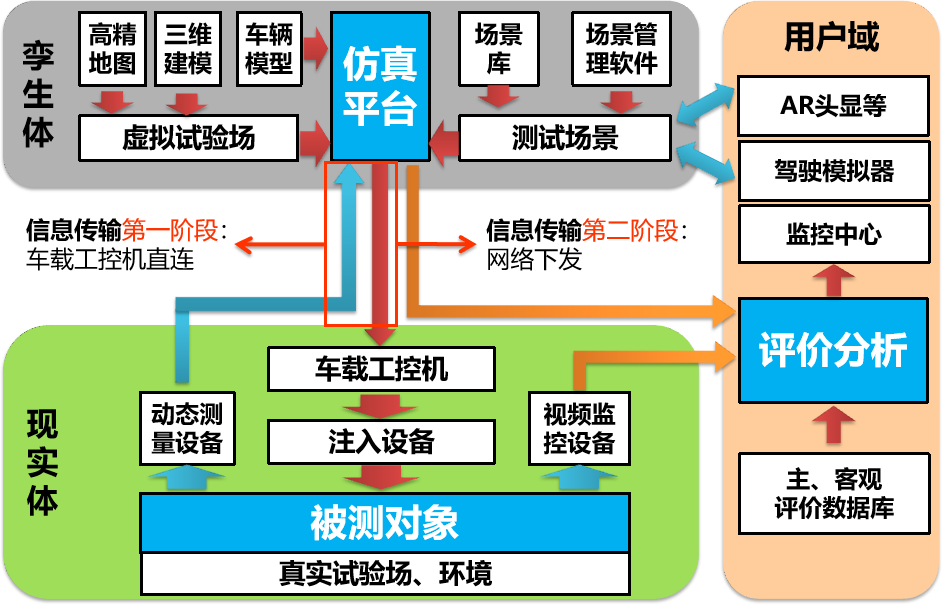
圖3 數(shù)字孿生測試評價體系構(gòu)成圖
以一臺自動駕駛汽車為被測對象,陳述系統(tǒng)工作過程:仿真平臺運(yùn)行虛擬試驗場、車輛傳感器模型、測試場景,形成一個或多個自動駕駛測試場景(如十字路口通行場景),通過注入設(shè)備將場景信息下發(fā)至自動駕駛汽車的控制器,自動駕駛汽車根據(jù)自身算法對十字路口信息進(jìn)行處理,發(fā)出決策信號(如減速通過),車輛執(zhí)行決策(如制動減速,緩慢通過路口);
該車輛的動作數(shù)據(jù)通過車端安裝的動態(tài)測量設(shè)備實時采集并上傳至仿真平臺用于驅(qū)動虛擬的自動駕駛汽車模型,在仿真平臺的場景中標(biāo)注車輛動態(tài)數(shù)據(jù);評價分析模塊對車輛動態(tài)數(shù)據(jù)進(jìn)行處理,基于評價維度和數(shù)據(jù)庫進(jìn)行車輛行為評價;車端、路端視頻監(jiān)控設(shè)備信息以及仿真平臺畫面?zhèn)鬏斨琳故酒脚_。通過多樣的接口與用戶交互,呈現(xiàn)測試過程和結(jié)果。
結(jié)合主、客觀評價數(shù)據(jù)庫,對自動駕駛車輛的功能表現(xiàn)進(jìn)行多維度分析。評價指標(biāo)基于國際、國內(nèi)通用的標(biāo)準(zhǔn)、規(guī)范為基礎(chǔ),融合積累的大量實際測試數(shù)據(jù),從安全性、智能度、舒適性、可靠性四個關(guān)鍵維度進(jìn)行綜合設(shè)定。
結(jié)合當(dāng)前技術(shù)成熟度,對數(shù)字孿生自動駕駛測試評價體系方案的開展分三階段進(jìn)行,如下表2所示。在5G網(wǎng)絡(luò)覆蓋度低、網(wǎng)絡(luò)時延不穩(wěn)定的情況下,開展車端下發(fā)方案建設(shè),通過車載數(shù)字孿生測試設(shè)備與車輛控制器直連注入,保證單車測試能力;在5G網(wǎng)絡(luò)成熟并穩(wěn)定的情況下,開展網(wǎng)絡(luò)下發(fā)方案建設(shè),可減少車端設(shè)備數(shù)量、降低單車設(shè)備成本、提高測試規(guī)模和效率;前兩個階段研究成熟后,開展擴(kuò)展應(yīng)用,如數(shù)字孿生仿真平臺上云、傳感器動力學(xué)模型校準(zhǔn)等應(yīng)用。
表2 技術(shù)方案開展階段規(guī)劃
| 階段 | 車端下發(fā)階段 | 網(wǎng)絡(luò)下發(fā)階段 | 擴(kuò)展應(yīng)用階段 |
| 主要內(nèi)容 | 建設(shè)搭載于測試車輛上的孿生設(shè)備,仿真場景與車輛直連注入 | 建設(shè)控制中心,仿真場景通過5G/網(wǎng)絡(luò)下發(fā)至測試車輛 | 開展數(shù)字孿生測試系統(tǒng)擴(kuò)展應(yīng)用,研究傳感器模型、動力學(xué)模型校準(zhǔn),云仿真等應(yīng)用 |
| 適用范圍 | 網(wǎng)絡(luò)差、單車測試 | 網(wǎng)絡(luò)優(yōu)、批量實車測試 | 校準(zhǔn)測試、云仿真 |
基于上述概念方案,設(shè)計可實現(xiàn)的硬件布局方案,如下圖4、圖5所示。硬件配置方案分車端下發(fā)和網(wǎng)絡(luò)下發(fā)兩種,對應(yīng)表2所示的前兩個階段。
3.2 方案硬件布局
車載下發(fā)方案主機(jī)及相關(guān)設(shè)備均安裝在被測車輛上,通過注入設(shè)備及硬線與被測車輛控制器相連接,實現(xiàn)信息的交互。
網(wǎng)絡(luò)下發(fā)方案的主機(jī)在試驗室內(nèi)或者云端,通過網(wǎng)絡(luò)形式(5G/V2X)下發(fā)至車載設(shè)備,接收轉(zhuǎn)換之后,完成注入和信息交互。
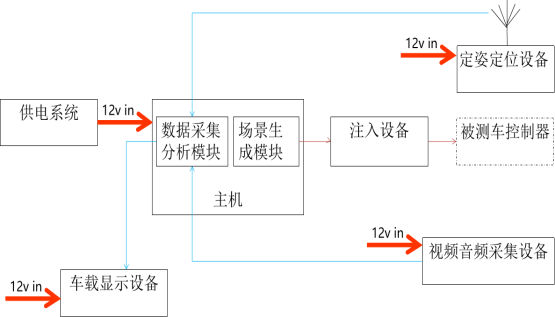
圖4 車端下發(fā)方案
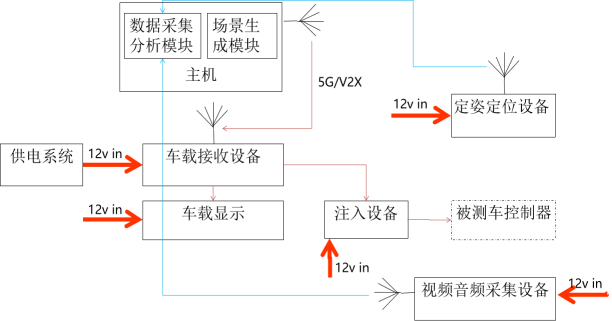
圖5 網(wǎng)絡(luò)下發(fā)方案
3.3 方案關(guān)鍵難點
在本方案中,信息交互技術(shù)是決定數(shù)字孿生能否真正實現(xiàn)虛實結(jié)合的關(guān)鍵難點,主要體現(xiàn)在下述幾個方面: 3.3.1場景注入多車型通用性的問題 自動駕駛汽車控制器接口協(xié)議、算法語言等百家爭鳴,對一種場景格式的識別程度可能存在不同,場景注入在多種車型上的通用性是必須考慮的問題。本方案嘗試采取兩種方式進(jìn)行解決:一是對外開放,即參考主流通信協(xié)議將場景注入格式標(biāo)準(zhǔn)化,并將關(guān)鍵的注入?yún)?shù)明確化,讓被測對象主動進(jìn)行適配接收。二是開發(fā)多個注入模板,即針對各大協(xié)議、廠商等,研究制定多個適用的場景注入格式模板,盡可能提升場景注入的快速適用性。 3.3.2信息傳輸時延導(dǎo)致交互不實時的問題 自動駕駛車速越高,信息傳輸時延帶來的影響越大,例如當(dāng)被測車輛以60 km/h的車速通過A點時,觸發(fā)虛擬測試場景下發(fā)動作,信息傳輸時延100 ms,虛擬測試場景到達(dá)被測車輛時車輛已經(jīng)超過A點約1.7 m,這使得數(shù)字場景與真實場景在同一時刻存在較大的位置差異,這對自動駕駛安全性功能測試來講誤差不可接受。在數(shù)字孿生技術(shù)方案實施時,需要從兩方面同時著手來解決此問題:一是盡可能降低傳輸時延,如采用硬線直連、采用5G通信等;二是在仿真平臺采用同步技術(shù)彌補(bǔ)時延帶來的誤差。 3.3.3測試效率提升的問題 隨著自動駕駛行業(yè)蓬勃發(fā)展,自動駕駛汽車開發(fā)測試需求必將是大批量的、需要的測試場景更是海量的。若采用每臺車輛匹配一套數(shù)字孿生測試系統(tǒng)的方式,為達(dá)到海量場景測試,需要使用多套系統(tǒng)并進(jìn)行長時間累積測試。所以在選擇數(shù)字孿生仿真平臺時必須考慮未來拓展應(yīng)用,具備布署云端的能力,實現(xiàn)一套系統(tǒng)支持多車同時測試、云端海量場景仿真等應(yīng)用。
3.4 應(yīng)用預(yù)期
虛擬仿真測試技術(shù)被列為測試方法三支柱之一,從敏捷開發(fā)、高適應(yīng)性、批量測試方面具備獨(dú)到的優(yōu)勢。數(shù)字孿生技術(shù)的突破性應(yīng)用,可以解決現(xiàn)有仿真測試真實性欠缺的問題、降低對測試場地和交通參與者的依賴、提高對自動駕駛需求場景的響應(yīng)速度,為自動駕駛汽車提供一種全新的高效、安全、可不斷升級的測試方法。隨著經(jīng)驗的積累和數(shù)據(jù)量的增加,數(shù)字孿生模型對物理實體的仿真預(yù)測準(zhǔn)確度會越來越高[5]。例如對毫米波傳感器模型精確度的提升,可以將某一真實目標(biāo)物的毫米波雷達(dá)特性模型化,通過數(shù)字孿生測試的方式測試真實車輛控制器對此模型輸入后的響應(yīng),再比對真實車輛面對此真實目標(biāo)的測試數(shù)據(jù),對毫米波雷達(dá)模型進(jìn)行精確度的優(yōu)化。 數(shù)字孿生技術(shù)還可以幫助實現(xiàn)自動駕駛邏輯策略的實時優(yōu)化,此優(yōu)化特指使自動駕駛行為更貼近人的駕駛行為。系統(tǒng)配備AR頭顯,引入駕駛員在環(huán)概念,可實時向駕駛員顯示當(dāng)前車輛正在經(jīng)歷的數(shù)字孿生測試場景,可實時對比自動駕駛控制行為與駕駛員意向控制行為的差異,輸出分析數(shù)據(jù),進(jìn)而幫助優(yōu)化自動駕駛邏輯策略。 預(yù)期數(shù)字孿生自動駕駛測試評價方案在自動駕駛汽車研發(fā)測試、認(rèn)證檢測、產(chǎn)品準(zhǔn)入、競品對標(biāo)、綜合評價、動力學(xué)模型校驗、傳感器模型校驗等方面具備廣闊的應(yīng)用前景。 本文主要從微觀層面介紹數(shù)字孿生在自動駕駛整車測試領(lǐng)域的應(yīng)用,從宏觀維度來看,數(shù)字孿生技術(shù)在測試系統(tǒng)領(lǐng)域也具備重要的應(yīng)用意義,例如測試區(qū)數(shù)字化管理、測試體系監(jiān)管調(diào)度平臺等。
總 結(jié)
本文結(jié)合數(shù)字孿生技術(shù)和自動駕駛測試評價技術(shù),研究數(shù)字孿生技術(shù)在自動駕駛測試領(lǐng)域的應(yīng)用方案,形成一種可實施的系統(tǒng)架構(gòu),提出一種新型、高效、安全的虛實相結(jié)合的實車在環(huán)測試方法,并對數(shù)字孿生技術(shù)應(yīng)用過程中的關(guān)鍵技術(shù)難點、解決方案要點進(jìn)行了說明,可為數(shù)字孿生技術(shù)的同類應(yīng)用提供參考,以達(dá)到更好開展數(shù)字孿生技術(shù)應(yīng)用的目的。
審核編輯 :李倩
-
自動駕駛
+關(guān)注
關(guān)注
788文章
14254瀏覽量
170047 -
數(shù)字孿生
+關(guān)注
關(guān)注
4文章
1466瀏覽量
12774
原文標(biāo)題:數(shù)字孿生技術(shù)在自動駕駛測試領(lǐng)域的應(yīng)用研究概述
文章出處:【微信號:vision263com,微信公眾號:新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
淺析4D-bev標(biāo)注技術(shù)在自動駕駛領(lǐng)域的重要性
自動駕駛技術(shù)測試有哪些?

自動駕駛技術(shù)落地前為什么要先測試?
蘿卜快跑在香港的自動駕駛測試區(qū)域再擴(kuò)大
新能源車軟件單元測試深度解析:自動駕駛系統(tǒng)視角
2024加州自動駕駛測試里程驟降50%
自動駕駛測試在設(shè)計環(huán)節(jié)中有何關(guān)鍵作用?
一文聊聊自動駕駛測試技術(shù)的挑戰(zhàn)與創(chuàng)新

MEMS技術(shù)在自動駕駛汽車中的應(yīng)用
人工智能的應(yīng)用領(lǐng)域有自動駕駛嗎






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論