") 基于深度圖像的人體關(guān)節(jié)定位算法
基于深度圖像的人體關(guān)節(jié)定位算法

人體姿態(tài)估計是當(dāng)前計算機視覺領(lǐng)域的熱點研究問題。對人體骨架關(guān)節(jié)點進(jìn)行準(zhǔn)確提取并構(gòu)建人體骨架模型,為進(jìn)一步的人體姿態(tài)識別、實時交互游戲等應(yīng)用提供了基礎(chǔ)。但是傳統(tǒng)的基于RGB圖像的方法容易受到光照、陰影、復(fù)雜背景的影響,準(zhǔn)確度不高并且算法復(fù)雜。利用深度圖像技術(shù)可以有效地解決上述問題,利用深度信息可以快速地進(jìn)行背景分割,抗干擾性能好,算法效率高。
本文主要研究基于深度圖像的人體關(guān)節(jié)定位算法。算法對深度圖像素點周圍區(qū)域的深度進(jìn)行格點化采樣以提取其深度特征,再使用隨機森林分類器進(jìn)行像素點分類,對同一類別的點使用Mean Shift算法聚類出中心點,以該中心點作為關(guān)節(jié)點位置。該算法可對人體全身關(guān)節(jié)點進(jìn)行定位。
局域深度特征提取
本文中采用如圖1所示的局域深度采樣特征。其中藍(lán)色點表示圖像I中給定的像素x,以該像素為中心生成一個5*5的格點矩陣,紅色的格點表示要進(jìn)行深度采樣的點。
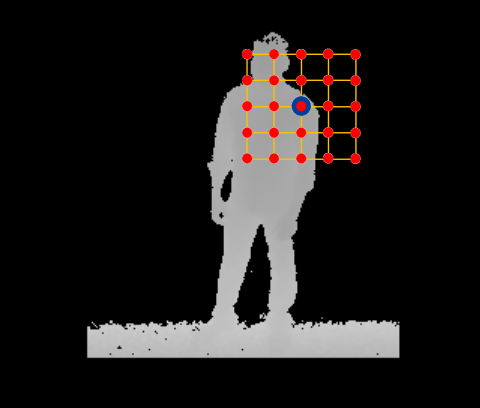
圖1 局域深度采樣示意圖
隨機森林分類器
分類器是對樣本進(jìn)行分類的算法的統(tǒng)稱,在機器學(xué)習(xí)中有許多種分類器可供我們選擇使用,包括邏輯回歸、樸素貝葉斯、支持向量機(SVM)、決策樹、隨機森林、神經(jīng)網(wǎng)絡(luò)等算法。綜合考慮分類的精度與效率,本課題中采用的是隨機森林分類器。
隨機森林分類器是由多棵決策樹組合而成的分類器,如圖2所示。決策樹的結(jié)構(gòu)類似二叉樹,由分裂結(jié)點和葉結(jié)點構(gòu)成。每一個分裂結(jié)點包含一個特征與閾值,像素x從根部開始,根據(jù)特征與閾值劃分進(jìn)入左子樹還是右子樹,這樣不斷地分裂直到葉結(jié)點。在每棵樹的葉結(jié)點能夠得到該像素對于各個身體部件的概率分布,將各棵樹得到的結(jié)果相加,得到最終的概率分布,擁有最高概率的一類作為最終的分類結(jié)果。
隨機森林將多棵決策樹合并在一起,準(zhǔn)確度相較于單棵決策樹有較大提升,并且多棵決策樹可以并行訓(xùn)練,提高了訓(xùn)練效率。
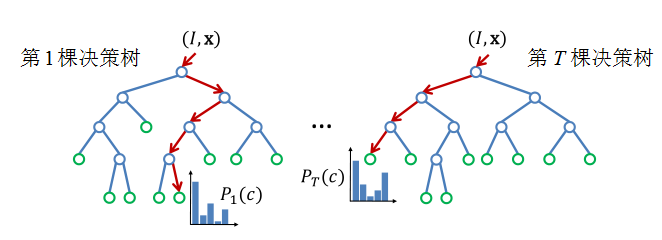
圖2隨機森林分類器
訓(xùn)練完隨機森林分類器后,我們利用其對像素點進(jìn)行分類,判斷其屬于身體的哪個部位。對于圖像中的每個像素,使用分類器對其分類后得到分類的結(jié)果,以及預(yù)測結(jié)果的概率。我們只選取圖像中預(yù)測概率高于80%的點,這樣就能得到密度不同的分類點。越靠近關(guān)節(jié)點位置,預(yù)測概率越高,點的密度越大,遠(yuǎn)離關(guān)節(jié)點位置的密度則小。
關(guān)節(jié)點位置估計
在得到像素點分類后,我們使用Mean Shift聚類算法得到屬于同一部位像素點的中心,作為關(guān)節(jié)位置。
Mean Shift算法一般為一個迭代過程,先計算感興趣區(qū)域內(nèi)的偏移均值,移動區(qū)域中心到計算出的質(zhì)心處,然后以此處作為新的起點,繼續(xù)移動。在迭代過程中,不斷向密度更大的地方偏移,直到移動到這類像素點密度最高的中心位置而停止。此時這個位置最能代表這一類點,我們將其作為該部位的關(guān)節(jié)點位置。分別對所有類別的點都運行一遍此算法后,我們就能得到全身關(guān)節(jié)點的位置。
但是由于分類結(jié)果并不一定準(zhǔn)確,聚類出的結(jié)果可能與真實關(guān)節(jié)點的位置有所偏移,這時我們可以采用人體骨架長度比例約束條件,來矯正一部分偏移較大的關(guān)節(jié)點,對預(yù)測結(jié)果進(jìn)行優(yōu)化。
流程介紹
訓(xùn)練流程:對一幅深度圖,取關(guān)節(jié)附近的點作為訓(xùn)練集,對這些點提取深度特征,再訓(xùn)練隨機森林分類器
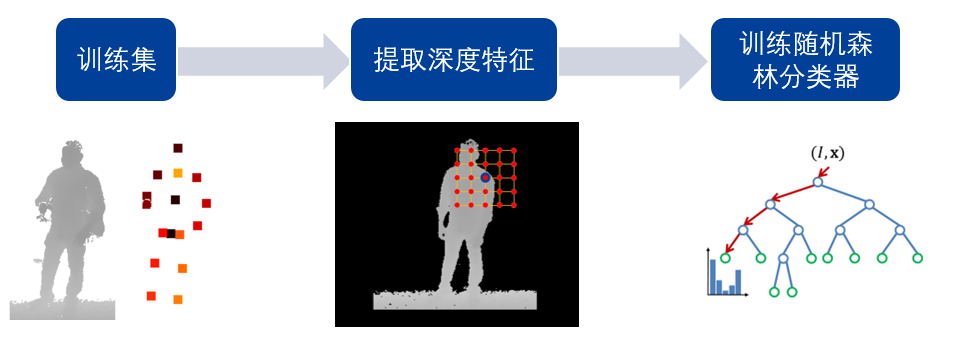
圖3訓(xùn)練流程示意圖
測試流程:深度圖背景分割得到人體區(qū)域圖像,使用隨機森林分類器對人體的像素點進(jìn)行分類,選取預(yù)測概率大于設(shè)定閾值的點,則得到疏密不同的各關(guān)節(jié)部位像素點,越接近關(guān)節(jié)點位置,像素點越密,再使用Mean shift算法進(jìn)行聚類,得到關(guān)節(jié)點位置
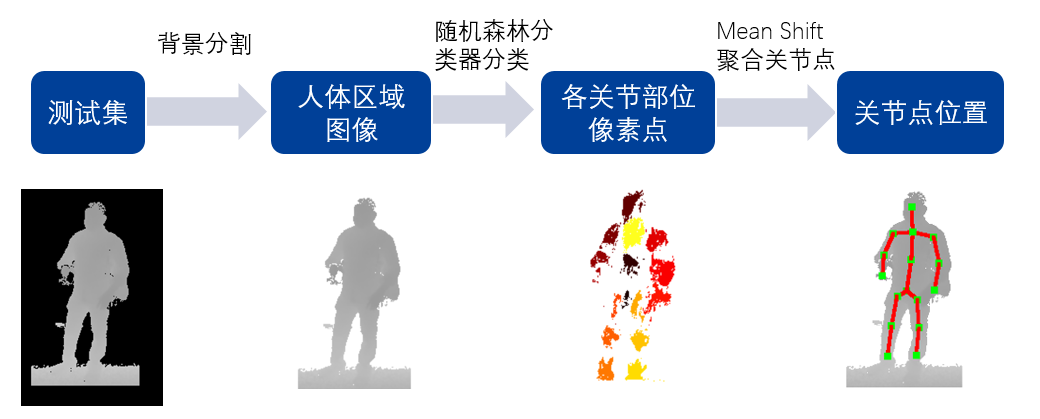
測試流程示意圖
運行效果
圖4為關(guān)節(jié)定位算法的運行效果,(a)為NTU數(shù)據(jù)集中關(guān)節(jié)點的標(biāo)準(zhǔn)位置;(b)是算法對同一張深度圖中關(guān)節(jié)點的定位結(jié)果;(c)為自制的Kinect測試集上的運行效果;(d)為采用公司研制的TOF相機模塊拍攝的深度圖的運行效果。可以直觀地看出定位效果較為良好。TOF相機的分辨率為320*240,因此相同距離下人體在畫面中所占比例更大。

(a) (b)

(c) (d)
圖4 算法運行效果示例
注:
(a)NTU測試集真值,25關(guān)節(jié)
(b)NTU測試集
(c)自制測試集
(d)TOF相機拍攝圖像
審核編輯 :李倩
-
算法
+關(guān)注
關(guān)注
23文章
4707瀏覽量
95201 -
機器學(xué)習(xí)
+關(guān)注
關(guān)注
66文章
8500瀏覽量
134440 -
深度圖像
+關(guān)注
關(guān)注
0文章
19瀏覽量
3606
原文標(biāo)題:3D視覺在人體姿態(tài)估計算法的應(yīng)用
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
基于衛(wèi)星圖像的智能定位系統(tǒng)軟件
基于衛(wèi)星圖像的智能定位系統(tǒng)全面解析
電學(xué)電壓放大器基于靜電傳感器的人體室內(nèi)定位研究的應(yīng)用
亞歷山大醫(yī)院研發(fā)全球新穎的人工智能算法(已獲國際專利)
ADS1293獲取的人體心電信號,如何實現(xiàn)隔直?
深度識別算法包括哪些內(nèi)容
可穿戴設(shè)備的人體成分測量 (BCM)申請簡介






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論