") 自動跟蹤算法的追蹤問題解決方案
自動跟蹤算法的追蹤問題解決方案

現代 IRST(紅外瞄準和跟蹤)傳感器可以有效跟蹤敵方目標(在意大利,我們擁有出色的 Skyward-G,由 Selex Galileo 開發(fā))。然而,達到目標的問題仍然懸而未決。在本文中,我們提出了一種自動跟蹤算法,其中目標執(zhí)行回避隨機游走;另一方面,算法的收斂(即到達/摧毀目標)是一個確定性的過程。
一點歷史
根據一個著名的軼事,在 1980 年代,斯德哥爾摩委員會沒有將諾貝爾獎授予美國著名物理學家 R. Dicke,因為他將幾年的職業(yè)生涯致力于實現紅外傳感器用于研究/跟蹤/殺死移動目標。更準確地說,紅外搜索和跟蹤 (IRST) 傳感器檢測飛機廢氣發(fā)出的紅外輻射。1950 年代使用的第一個模型相當原始,旋轉自由度降低。對此類探測器后續(xù)發(fā)展的一個顯著貢獻來自越南戰(zhàn)爭,這也歸功于迪克的開創(chuàng)性工作:新一代傳感器看到了美國響尾蛇導彈上的光。
維納濾波器和 IRST 傳感器
IRST 傳感器是飛機尾氣發(fā)出的紅外輻射的探測器。眾所周知,任何熱物體都會發(fā)射紅外范圍內的電磁輻射。如果這種發(fā)射類似于在溫度T處處于熱力學平衡狀態(tài)的黑體,如果λ是發(fā)射輻射的波長,我們有位移定律:

其中λ max是發(fā)射功率最大的波長值。從這個方程可以看出,這個大小與溫度成反比。在IRST傳感器的實現中,需要參考一個溫度范圍(T 1 ,T 2),使波長落在紅外波段。為了更清楚,在圖 1 中,我們報告了作為無量綱變量hν / kT函數的發(fā)射功率趨勢,其中h是普朗克常數,k是玻爾茲曼常數,ν = c /λ 是發(fā)射頻率輻射 ( c是光速)。從溫度升高時繪制的曲線族中,我們看到隨著溫度升高,發(fā)射峰向高頻移動。
從操作上講,IRST 傳感器是一種熱像儀,能夠檢測 2 之間波長范圍的紅外輻射。5 × 10 -8和 11 × 10 -8厘米。然而,主要問題是由于電磁場在紅外范圍內在地球大氣層中傳播的能力很差。更準確地說,紅外光子被大氣中存在的水蒸氣分子吸收。因此,為了獲得良好的效率,它們運行的距離不得超過指定的閾值。此外,為了對目標圖像進行可能的軟件重建,需要為系統(tǒng)配備維納濾波器。1如果不是這樣,一群鳥很可能被誤認為是敵機。
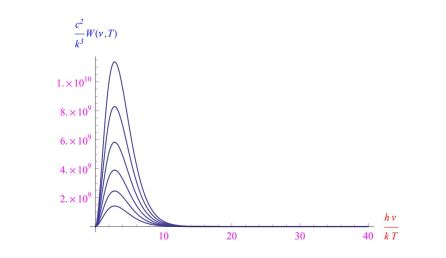
圖 1:黑體在溫度T的熱平衡中發(fā)射的功率密度趨勢(對于該量的不同值)作為無量綱變量hν / kT的函數
動態(tài)設置
地面參考系
動態(tài)設置跟蹤問題意味著編寫運動微分方程或應用牛頓第二定律。因此,有必要指定一個慣性參考系。由于飛機速度比表征地球運動(繞軸自轉、繞太陽公轉)的相應運動學量高幾個數量級,因此可以非常近似地認為我們的星球是“靜止的”。因此,讓我們假設一個由笛卡爾坐標軸組成的 Oxyz 三元組作為參考系統(tǒng) ,假設地球中心的原點為球形;x 軸在赤道平面內并朝向腳 格林威治子午線(腳是子午線與赤道平面的交點)。在這種情況下,飛機的地理坐標(緯度和經度)和高度可以很容易地轉換為笛卡爾坐標(x,y,z)。
時間分辨率和飛機機動性
在這種動態(tài)場景中, 配備 IRST 傳感器的攻擊者(導彈)A 必須檢測目標(戰(zhàn)斗機)B。必須快速連續(xù)執(zhí)行檢測,以便能夠將其速度矢量指向瞬時位置的目標。如果Δt 是表征上述序列的最小時間間隔,則檢測到的軌跡是真實軌跡中的一段。后者顯然是微分幾何意義上的平滑曲線。還必須考慮單個車輛的機動性。為此,我們用 ( δt) A 和 ( δt) B表示 分別為 A 和 B 的機動時間。由于戰(zhàn)斗機比導彈更機動,我們預計以下雙重不等式:

換句話說,目標的航向變化(即規(guī)避機動)在攻擊者的時間尺度上是瞬時的,并且與Δt相比都小到可以忽略不計。這種情況表明忽略上述時間尺度。這相當于假設兩架飛機都具有無限機動性。最后,為了使問題在數學上更易于管理,我們執(zhí)行通過 Δ t → 0 的限制的操作。這相當于直接考慮真實軌跡,將單個車輛通過一個質點進行模式化以忽略旋轉自由度。這種方法可能看起來不切實際,但它構成了解決所提出問題的第一個近似步驟。
IRST 運動學
首先,我們觀察到追擊并不自動意味著可達性:攻擊者 A 可以無限期地追擊目標 B,但從未到達目標 B。在任何情況下,重要的是通過以下方式數學表達以下條件逐步進行。在圖 2 中,我們報告了飛機在通用時刻 t相對于地面參考系統(tǒng)的位置,其中 D ( t ) 是 距離向量,其模數是上述時刻 A 點和 B 點之間的歐幾里得距離。 但是讓我們通過指定圖中的符號來嘗試更清楚。
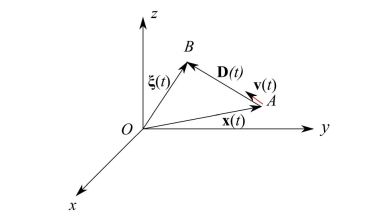
圖 2:飛機相對于指定的地面三元組的瞬時位置
這里,ξ ( t ) 是目標的位置向量,即從原點向目標瞬時位置標記的向量:

我們用希臘字母來區(qū)分它們與拉丁同音字,我們將用它來表示 A 的坐標。實際上,后者位于

我們不知道目標的坐標,但是追擊的條件是通過強加 A 的速度矢量始終指向 B 的瞬時位置來表達的(換句話說,攻擊者沒有預料到目標的移動) 。 從向量演算中,我們知道兩個向量是平行且等價的當且僅當它們是成比例的并且比例的標量是非負的:

這個等式定義了“距離”向量:

其模塊是:

根據等式 5,我們有:

τ (t)的運動學意義 由此而來:這個量是用速度 v ( t ) 行進距離 D ( t ) 所需的時間。很明顯,A 到達 B 當且僅當存在一個瞬間 t * 使得 D ( t * ) = 0 或相同的 τ ( t *) = 0。以下條件由等式 5 表示,而可達性是一個更強的條件,在某種意義上,除了前一個條件之外,在函數 τ (t) 的有限處存在零。 順便說一句,如果正函數的唯一零在無窮遠處,則相應的成就是漸近的(即,必須經過無窮大的時間)。如果

攻擊者不能接近最小距離。這些考慮提出了以下定義: τ ( t ) 是碰撞時間。我們注意到這個大小不能從運動學數據中確定。相反,它必須是先驗的,然后才能確定我們正在建模的戰(zhàn)爭沖突的結果。根據等式 5 并考慮到等式 6,可得出:

該方程可以逐個分量地寫出(根據坐標軸 x、y、z),得到一階微分方程組:

其中,連同初始條件

它唯一地確定了解決方案,從而確定了攻擊者的軌跡。我們稱 (11) 跟蹤方程或追蹤方程。為了在Mathematica計算環(huán)境中執(zhí)行模擬, 最好在二維中工作,抑制系統(tǒng) (11) 的第三個方程(我們將立即得出的結論推廣到通常的三維)。所以讓我們重寫:

(13) 型微分方程的特點在于解具有初始瞬態(tài) ,然后讓位于穩(wěn)態(tài)解。換言之,在初始階段之后,追蹤軌跡經歷了穩(wěn)定。例如,在圖 3 中,顯示了一些跟蹤幀,但沒有實現,因為我們使用 τ ( t ) = τ 0 》 0。由于初始條件的特定選擇,在這種情況下,沒有初始瞬態(tài),并且跟蹤軌跡本身就是一個圓。我們觀察到存在追逐,因為攻擊者的速度矢量(藍點)朝向目標的瞬時位置(紅點)。
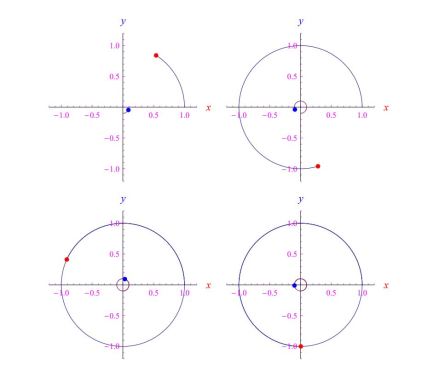
圖 3:紅點穿過指定的圓周,而藍點跟隨紅點,因為速度矢量指向紅點的瞬時位置。很明顯,藍色永遠不會變成紅色,因為我們設置了 τ (t) = τ0 》 0。
在圖 4 中,我們報告了一些帶有初始瞬態(tài)的追逐幀。如您所見,軌跡非常具有啟發(fā)性。我們可以假設以下類型的線性定律,而不是考慮函數 τ ( t ) 相同地恒定(并且為正):

其成就時刻為 t * = β / α。 α = 10 , β = 0的前一種情況(循環(huán) 跟蹤)。2,整合跟蹤方程,我們得到圖5的幀。在更現實的場景中,目標以隨機模式執(zhí)行規(guī)避機動或執(zhí)行隨機游走。眾所周知,后者是維納過程。2Mathematica 計算環(huán)境允許快速實施此過程。準確地說,通過一個數組的插值,它的元素是白噪聲假定的值,我們得到一個在數學分析意義上實際上是時間函數的量。換句話說,進入跟蹤方程 (13) 的目標坐標被視為通常的函數,因此可以通過 Mathematica 執(zhí)行 它們的積分,從而知道跟蹤的軌跡。在圖 6 中,我們報告了隨機游走中目標的一些追蹤/實現幀,而在圖 7 中,繪制了兩架飛機的速度。目標是清晰的白噪聲。
結論
追蹤方程(11)作用于攻擊者速度矢量的方向和方向。另一方面, 函數τ ( t ) 作用于該向量的模,即,作用于標量函數v ( t )。
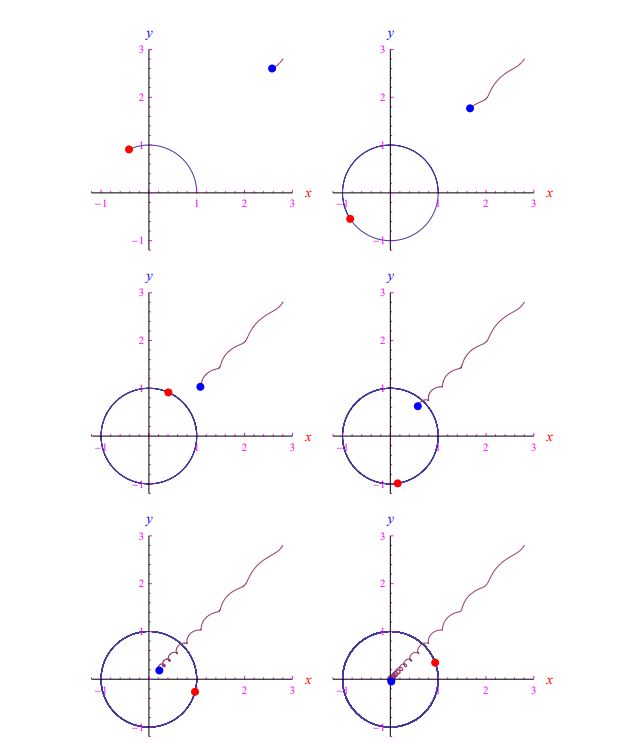
圖 4:術語“瞬態(tài)”描述了一條曲線,直到它停留在半徑 1/√401 的圓周上。
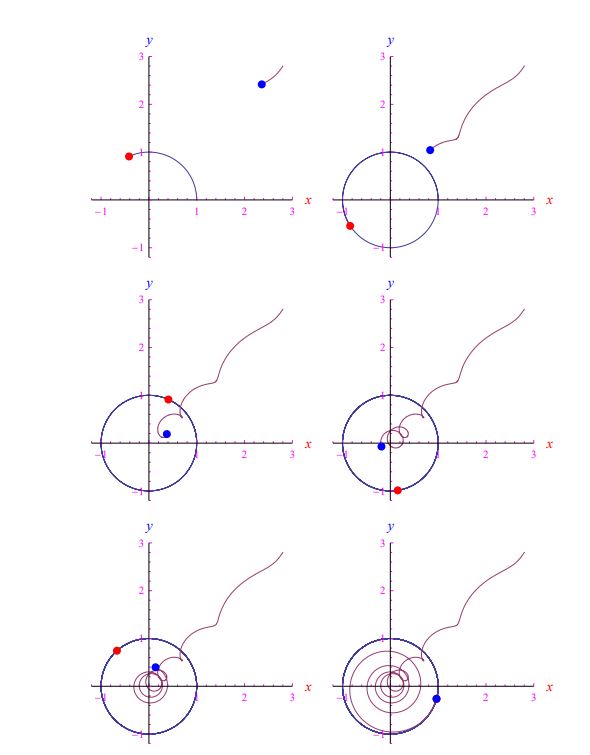
圖 5:攻擊者在時間t * = 50(無量綱單位)后到達目標。
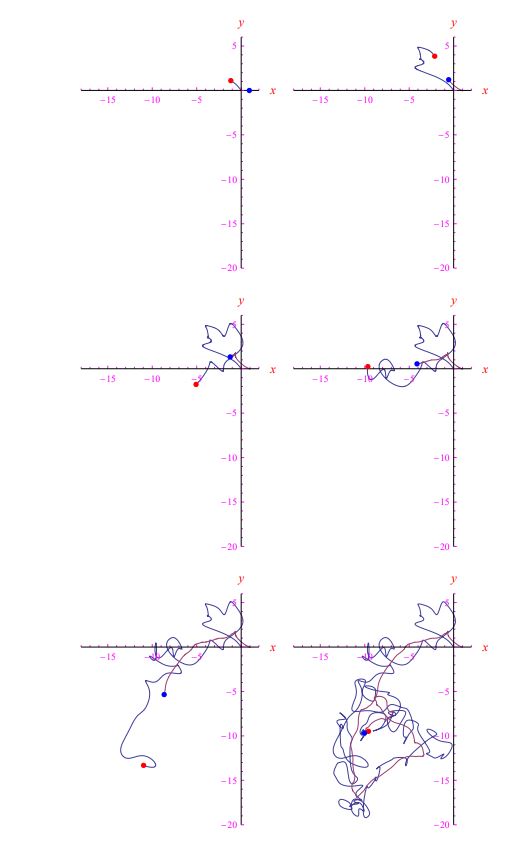
圖 6:攻擊者在時間t * = 200(無量綱單位)后到達目標。
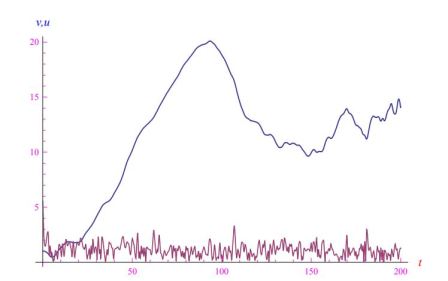
圖 7:速度與時間(無量綱單位)
由此可見,追擊是由攻擊者通過 ξ (t) 決定的,而碰撞是由 τ (t) 決定的。我們的算法是一個有趣的計算實驗,可以更好地理解 IRST 運動學。
審核編輯:郭婷
-
傳感器
+關注
關注
2565文章
52930瀏覽量
766857 -
濾波器
+關注
關注
162文章
8133瀏覽量
181933
發(fā)布評論請先 登錄
步進電機基礎(8.2)-步進電機的問題解決方案-降低振動噪音的解決方法 相關資料分享
IPTV系統(tǒng)中的FPGA供電問題解決方案
altium_designer_Summer09出現的問題解決方案
手機快充的噪聲問題解決方案資料下載

N76E003的EEPROM問題解決方案:使用Data Flash模擬EEPROM
C2000 F28004x系列MCU PLL鎖相失敗問題解決方案





 工商網監(jiān)
工商網監(jiān)
評論