") 實(shí)現(xiàn)道路交叉口無信號燈控制
實(shí)現(xiàn)道路交叉口無信號燈控制
隨著智能網(wǎng)聯(lián)汽車、5G通信和智能交通系統(tǒng)的發(fā)展,有望在保證通行安全,提升通行能力的情況下實(shí)現(xiàn)道路交叉口無信號燈控制。
研究背景
自動交叉口管理系統(tǒng)(Autonomous Intersection Management systems,AIMs)能夠?qū)崿F(xiàn)無交通信號下對網(wǎng)聯(lián)智能汽車(CAV)進(jìn)行控制,保障安全有效的交通流。但目前的AIM算法主要基于控制算法,不具備適應(yīng)或不斷學(xué)習(xí)新情況的能力。如:
(1)基于固定時間的交通燈控制算法(Fix Time,FT)
(2)基于排隊理論的智能交通燈控制算法(iREDVD )
(3)近期提出的AIMs。
本文要解決的問題
讓AIMs系統(tǒng)具有對真實(shí)且復(fù)雜的交通場景(不斷變化的十字交叉口流量密度,雙向6車道,直行,左轉(zhuǎn),右轉(zhuǎn)三個行駛方向,100m內(nèi))進(jìn)行自主學(xué)習(xí)和主動協(xié)同控制CAV的能力,且保證不發(fā)生碰撞事故。
解決的方案:先進(jìn)AIM方法(本文定義為adv.RAIM)。基于端到端多主體深度強(qiáng)化學(xué)習(xí)(MADRL)(LSTM)+通過自我游戲進(jìn)行基于課程的學(xué)習(xí)
方案的效果:通行時間,等待時間,和時間損失的減少,附帶的讓經(jīng)濟(jì)性和排放性能都得到改善。
傳統(tǒng)的AIMs
主要包括兩個模塊:沖突模塊和優(yōu)先級模塊 1、沖突模塊:負(fù)責(zé)確定兩輛車在接近或穿過交叉口時是否會發(fā)生沖突。四種沖突識別方法:i)基于交叉口的,ii)基于網(wǎng)格的,iii)基于沖突點(diǎn)的,iv)基于車輛自由選擇的。 2、優(yōu)先級模塊:在遇到?jīng)_突時,對車輛狀態(tài)(例如速度、加速度、路線等)采取行動并管理車輛的通行權(quán)來解決沖突。通行權(quán)的分配有以下五個方法:i)基于到達(dá)交叉口的順序,先到先得(FCFS);ii)根據(jù)車輛/交叉口狀態(tài)分配優(yōu)先級,如快速優(yōu)先服務(wù)(FFS)(到達(dá)交叉口最快的車輛獲得最高優(yōu)先級)或長隊優(yōu)先(LQF)(進(jìn)入隊列最長的車輛具有最高優(yōu)先級);iii)使用一些啟發(fā)式方法,如動態(tài)規(guī)劃(DP)或線性混合整數(shù)規(guī)劃(MILP)(通過一系列方程和條件用于求解,實(shí)時性和復(fù)雜適應(yīng)性差);iv)通過拍賣,對出價最高的車輛給予更高的優(yōu)先權(quán)(不行,平等問題);v)通過人工智能機(jī)制,如遺傳算法或強(qiáng)化學(xué)習(xí)。
注意:在車輛流量較低的情況下,F(xiàn)CFS提供了更好的性能,但當(dāng)交通流量較高(>800輛/小時)時,紅綠燈控制提供了更好性能。此外,當(dāng)交通不對稱、突發(fā)或有主干道和街道連接時,F(xiàn)CFS的性能比紅綠燈控制差。
本文提出的方案:adv.RAIM(狀態(tài)/沖突編碼器+運(yùn)動規(guī)劃器)
1、狀態(tài)/沖突編碼器(使用LSTM).輸入為車輛狀態(tài)(位置,速度,角度,車道,行駛方向,行駛趨勢等),輸出為待控制車輛與其他車輛之間沖突的編碼。 2、運(yùn)動規(guī)劃器。包括具有ReLU激活函數(shù)的四個全連接層。 3、更新時間步長為250ms.使用雙延遲深度確定性策略梯度(TD3)優(yōu)化控制器. 4、獎懲機(jī)制:如果發(fā)生碰撞給予?100(強(qiáng)負(fù)獎勵)。如果通過交叉口,給予+100(強(qiáng)正獎勵)。?timestep(弱負(fù)獎勵)鼓勵盡可能快地通過交叉口。確保車輛盡可能快地通過交叉口,同時保證安全。 5、實(shí)現(xiàn)更穩(wěn)定和快速的訓(xùn)練模型的兩個技術(shù): i) Prioritized Experience Replay: (PER)。在DRL中,添加了一個重放緩沖區(qū)來存儲過去的經(jīng)驗(yàn),最“可學(xué)習(xí)”的經(jīng)驗(yàn)是當(dāng)預(yù)測Q值和實(shí)際Q值差值(時間差(TD)誤差)高時, 在優(yōu)化過程中從重放緩沖區(qū)中選擇體驗(yàn)的可能性就越大。 ii) Learning by curriculum:訓(xùn)練任務(wù)由易到難,且逐漸增加仿真車輛數(shù)。 6、仿真軟件:SUMO;算法編寫:Pytorch1.5.0和Python3.7;仿真包含一個訓(xùn)練場景和四個測試場景。使用的車輛分布為:35%的柴油車、35%的汽油車和30%的零排放電動汽車。 7、分析指標(biāo): (1)訓(xùn)練場景:全局獎勵、碰撞次數(shù)和時間損失
(2)測試場景:直接指標(biāo):行程時間、等待時間和擁堵造成的時間損失。間接指標(biāo):排放污染物和燃油/電力消耗。
結(jié)果
訓(xùn)練出的模型系統(tǒng)穩(wěn)定性好。在最接近真實(shí)復(fù)雜交通場景的第四個測試場景中,行程時間最多減少59%。時間損失最多可減少95%。污染氣體(CO、CO2、HC、PMx和NOx)的排放量減少了37%、13%、28%、37%、50%,燃料和電力的消耗量分別減少21%和27%。(因?yàn)闇p少了加減速的次數(shù))
讀后感:本文最大的創(chuàng)新點(diǎn)是將深度強(qiáng)化學(xué)習(xí)網(wǎng)絡(luò)運(yùn)用到AIMs中,并且將交通場景擴(kuò)展得更為復(fù)雜。
審核編輯 :李倩
-
管理系統(tǒng)
+關(guān)注
關(guān)注
1文章
2751瀏覽量
36847 -
信號燈
+關(guān)注
關(guān)注
2文章
72瀏覽量
26680
原文標(biāo)題:未來交叉口無信號燈可行嗎?
文章出處:【微信號:智能浪尖,微信公眾號:智能浪尖】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
如是RS10測量系統(tǒng)在道路交叉口地形圖測繪項目中的應(yīng)用
使用技巧 | 超聲波傳感器信號燈異常?快速排查方法get!
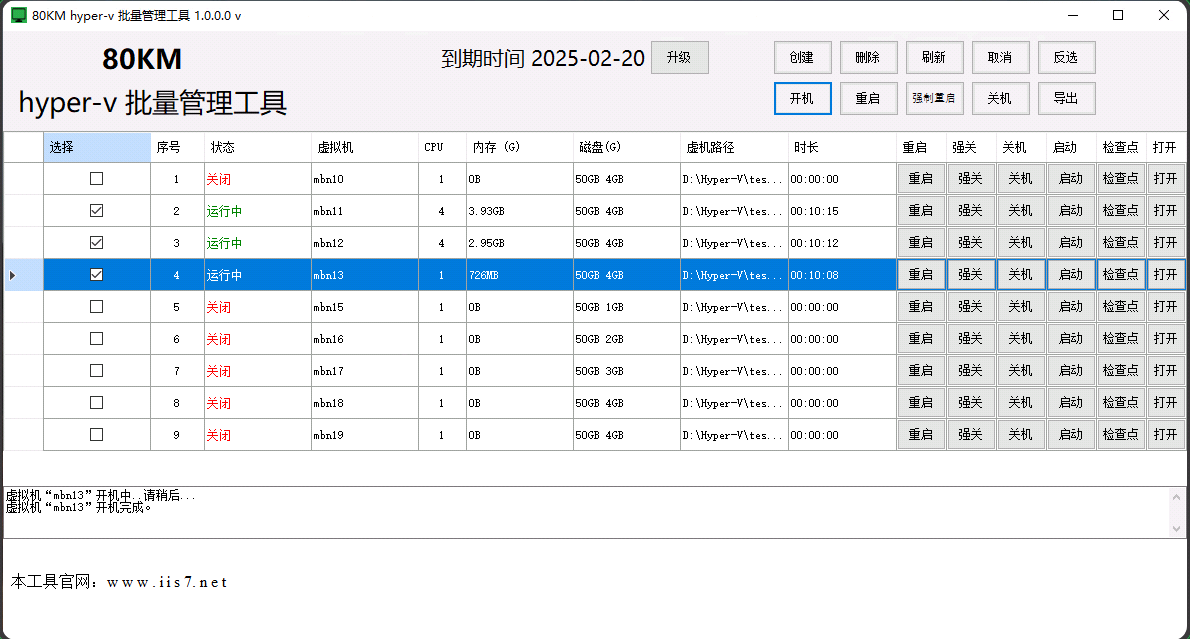
hyper -v管理,hyper -v管理的操作步驟,hyper-v批量管理工具的使用指南
經(jīng)典的PLC項目案例詳解

智慧城市可以實(shí)現(xiàn)哪些方面的監(jiān)測
基于FPGA技術(shù)的智能交通信號燈控制系統(tǒng)
WTR-565 車輛距離和速度測量雷達(dá) 彩頁
智慧交通信號燈控制系統(tǒng),計訊工業(yè)無線路由器助力城市道路管理

語音IC方案,在交通信號燈語音提示器的應(yīng)用解析,NV040D

人工智能在智慧城市建設(shè)中的應(yīng)用
推動智慧交通建設(shè),邊緣計算賦能交通信號燈數(shù)據(jù)處理與決策能力

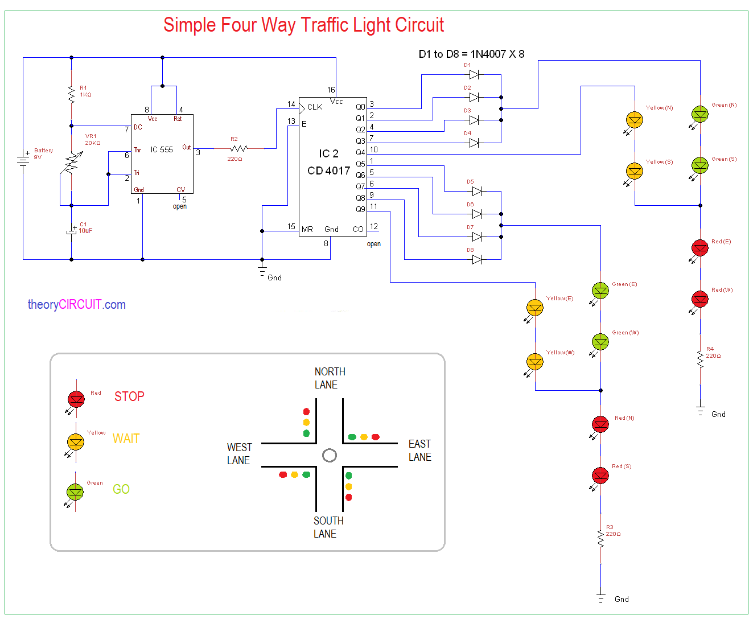
基于555定時器的四路交通燈電路圖





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論