") 數(shù)據(jù)鏈路層的主要協(xié)議分析與解串器AIM916介紹
數(shù)據(jù)鏈路層的主要協(xié)議分析與解串器AIM916介紹
數(shù)據(jù)鏈路層的主要協(xié)議有:
1、Point-to-Point Protocal——PPP點到點。
3、High-Level Data Link Control Protocal——高級鏈路控制協(xié)議。
4、Frame Relay——幀中繼。
5、Asynchronous Transfer Mode——異步傳輸模式。
隨機訪問協(xié)議:
在隨機訪問協(xié)議中,不采用集中控制方式解決信息發(fā)送的次序問題。所有用戶都可以根據(jù)自己的意愿隨機發(fā)送信息,占用信道全部速率。在總線網(wǎng)中,當有兩個或者多個用戶同時發(fā)送信息的時候,就會產(chǎn)生幀的沖突。這導(dǎo)致所有沖突用戶的發(fā)送均失敗。
為了解決隨機接入發(fā)生的碰撞,每個用戶需要按照一定的規(guī)則反復(fù)的重傳他的幀。知道幀沒有碰撞到通過。
這些規(guī)則就是隨機訪問MAC協(xié)議。
重用的協(xié)議:ALOHA協(xié)議,CSMA協(xié)議,CSMA/CD協(xié)議,CSMA/CA協(xié)議
這些協(xié)議的核心思想都是:勝利者通過爭用獲得信道,進而獲得信息的發(fā)送權(quán),所以說隨機訪問MAC協(xié)議,也叫爭用型協(xié)議。
MAC采用信道劃分機制,那么節(jié)點之間的通信,要不就是共享空間,要不就共享時間,要不就兩個都共享。
隨機MAC:實質(zhì)上是一種廣播信道轉(zhuǎn)化為點到點信道的行為。
因為交換機可以轉(zhuǎn)發(fā)廣播,隨機訪問MAC,可以將廣播轉(zhuǎn)化為point to point
1.1、ALOHA協(xié)議:隨機接入系統(tǒng)協(xié)議
1.2、CSMA協(xié)議:
如果每個站點在發(fā)送前都先偵聽一下公用的信道,那么發(fā)送信道空閑后再發(fā)送,那么將會大大減小沖突的可能。從而提高信道的利用率。
載波偵聽多路訪問(Carrier Sense Multiple Access,CSMA)
CSMA協(xié)議對ALOHA協(xié)議的一種改進,也就是多了一個載波偵聽裝置。
1.3、CSMA/CD協(xié)議:載波偵聽多路訪問/碰撞檢測
是對CSMA協(xié)議的改進方案,適用于總線型網(wǎng)絡(luò)或者半雙工網(wǎng)絡(luò)環(huán)境
載波偵聽:也就是發(fā)送前先偵聽,每次發(fā)送數(shù)據(jù)之前都要先檢查一下總線上是否有其他站點在發(fā)送數(shù)據(jù),如果有則暫時不要發(fā)送數(shù)據(jù),等待信道變?yōu)榭臻e的時候再發(fā)送。
碰撞檢測:就是一邊發(fā)送一邊偵聽,適配器在發(fā)送數(shù)據(jù)的時候變檢測信道上的信號電壓的變化情況,用來判斷自己在發(fā)送數(shù)據(jù)的時候其他站點是否也在發(fā)送數(shù)據(jù)。
CSMA/CD工作流程:先聽后發(fā),邊聽邊發(fā),沖突停發(fā),隨機重發(fā)總線的傳播時延對CSMA/CD的影響很大,CSMA/CD中的站不能同時發(fā)送和接收所以CSMA/CD的以太網(wǎng)是不進行全雙工通信,只能進行半雙工通信。
1.4、CSMA/CA協(xié)議
CSMA/CD協(xié)議已經(jīng)應(yīng)用在使用有線連接的局域網(wǎng)中,但是要在無線局域網(wǎng)的環(huán)境下,卻不能用。
CSMA/CD協(xié)議,尤其是碰撞部分,因為無線局域網(wǎng)中,接受信號的強度遠遠小于發(fā)送信號的強度。而且在無線介質(zhì)上信號強度變化范圍很廣,要實現(xiàn)碰撞檢測,那么在硬件上要花費很大。
在無線通信中,并非所有的站點都可以偵聽到對方,也就是隱蔽站的問題。
CSMA/CA協(xié)議,廣泛用于無線局域網(wǎng)。
把碰撞檢測改成了碰撞避免(Collision Avoidance,CA)。
碰撞避免:不是指協(xié)議可以完全避免碰撞,而是指協(xié)議的設(shè)計要盡量減少碰撞的發(fā)生概率。
CSMA/CA采用二進制指數(shù)退避算法。通過預(yù)約信道,ACK幀,RTS/CTS幀,三種機制來實現(xiàn)碰撞避免
RTS/CTS幀,主要用來解決無線網(wǎng)的隱蔽站問題。
預(yù)約信道,ACK幀,都是必須要實現(xiàn)的。
預(yù)約信道:發(fā)送方在發(fā)送數(shù)據(jù)的同時想起他站點通過告知自己傳輸數(shù)據(jù)需要的時間長度,方便讓其他站點在這段時間內(nèi)部發(fā)送數(shù)據(jù),避免碰撞。
ACK幀:所有站點在正確接收到發(fā)送給自己的數(shù)據(jù)幀后,都需要向發(fā)送方應(yīng)答一個ACK幀。
總結(jié):
CSMA/CA協(xié)議的基本思想:發(fā)送數(shù)據(jù)的時候先廣播告知其他節(jié)點,讓其他節(jié)點在某個時間段內(nèi)不要發(fā)送數(shù)據(jù),避免碰撞。
CSMA/CD協(xié)議的基本思想:發(fā)送前先偵聽,邊發(fā)送邊偵聽,一旦出現(xiàn)碰撞馬上停止發(fā)送。
輪詢訪問MAC:令牌傳遞協(xié)議:
在輪詢訪問中,用戶不能隨機的發(fā)送信息,是通過集中控制的監(jiān)控站,以循環(huán)的方式輪詢每個節(jié)點。然后決定信道的分配。
當某個節(jié)點使用信道的時候,其他節(jié)點都不能使用信道。典型的輪詢MAC協(xié)議是令牌傳遞協(xié)議,令牌環(huán)局域網(wǎng)。
令牌傳遞協(xié)議:一個令牌在各個節(jié)點以一個固定的次序交換。令牌是個特殊的比特組成的幀,當換上的站希望傳遞幀的時候,就必須等待令牌,一旦收到令牌,站點就可以啟動發(fā)送幀。
輪詢MAC適合復(fù)雜很高的廣播信道,負載很高的信道就是多個節(jié)點在同一時刻發(fā)送數(shù)據(jù)概率很大的信道。
如果廣播信道采用隨機MAC,發(fā)生沖突的概率很大,而采用輪詢MAC則可以更好滿足各個節(jié)點的要求。
輪序的實質(zhì):不共享時間,空間。實質(zhì)上就是在隨機MAC的基礎(chǔ)上,限定了有權(quán)利發(fā)送數(shù)據(jù)的節(jié)點只能有一個。
即使是廣播信道,都可以通過MAC使得廣播信道邏輯上變成點對點的信道。所以說數(shù)據(jù)鏈路層研究的是點對點之間的通信。
局域網(wǎng)使用的協(xié)議主要在數(shù)據(jù)鏈路層。
廣域網(wǎng)使用的協(xié)議主要在網(wǎng)絡(luò)層。
也就是說網(wǎng)絡(luò)中的兩個節(jié)點要進行數(shù)據(jù)交換,節(jié)點除了要給出數(shù)據(jù)外,還要給數(shù)據(jù)包裝上一層控制信息,用來實現(xiàn)檢錯糾錯的功能。如果這層信息是數(shù)據(jù)鏈路層的協(xié)議控制信息,就叫做使用了數(shù)據(jù)鏈路的協(xié)議,如果這層控制信息是在網(wǎng)絡(luò)層,就是使用了網(wǎng)絡(luò)層的協(xié)議。
廣域網(wǎng)強調(diào):資源共享。
局域網(wǎng)強調(diào):數(shù)據(jù)傳輸。
廣域網(wǎng)中一個重要問題:路由選擇和分組轉(zhuǎn)發(fā)。
路由選擇協(xié)議:負責搜索分組從某個節(jié)點到目的節(jié)點的最佳路由,以便構(gòu)成路由表。
分組轉(zhuǎn)發(fā):從路由表構(gòu)造出轉(zhuǎn)發(fā)分組的轉(zhuǎn)發(fā)表。
PPP協(xié)議和HDLC協(xié)議是目前最常用的兩種廣域網(wǎng)數(shù)據(jù)鏈路層的面向字節(jié)的協(xié)議
PPP協(xié)議(Point to Point Protocol):
使用串行線路通信的面向字節(jié)的協(xié)議,PPP協(xié)議應(yīng)用在直接連接的兩個節(jié)點的連路上。
目的:通過撥號或者專線方式建立點對點的連接放松數(shù)據(jù),讓它成為各種主機,網(wǎng)橋,路由器之間簡單連接的解決方法。
PPP協(xié)議:在SLIP的基礎(chǔ)上發(fā)展而來,可以在異步線路上傳輸,也可以在同步線路上用。
不僅用于Modem鏈路,還可以用于路由器和路由器之間的鏈路。
PPP組成:
鏈路控制協(xié)議LCP:用來建立,配置,測試,管理數(shù)據(jù)鏈路。
網(wǎng)絡(luò)控制協(xié)議NCP:由于PPP可以同時用多種網(wǎng)絡(luò)層協(xié)議,每個不同的網(wǎng)絡(luò)層協(xié)議要用一個相應(yīng)的NCP來配置。一個將IP數(shù)據(jù)報封裝到串行鏈路的方法。
PPP幀和HDLC幀的格式一樣,收尾都是相同的標志字段為7E。
PPP協(xié)議是點對點的,不是總線型,不用CSMA/CD協(xié)議。
HDLC協(xié)議:
高級數(shù)據(jù)鏈路控制(High-level Data Link Control):面向比特的數(shù)據(jù)鏈路層協(xié)議。
HDLC協(xié)議不依賴任何一種字符集編碼,數(shù)據(jù)報文可以透明傳輸。
PPP是面向字節(jié)的,HDLC協(xié)議是面向比特的。
TCP/IP協(xié)議簇:TCP,IP,ICMP,ARP,RARP,UDP,DNS,F(xiàn)TP,HTTP。
HDLC,PPP是ISO提出的數(shù)據(jù)鏈路層協(xié)議,不屬于TCP/IP協(xié)議簇
產(chǎn)品描述;
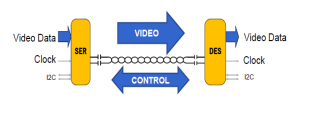
AIM916是首款基于車載高清鏈路協(xié)議(AHDL)的解串器。本解串器和與之對應(yīng)的AIM915串行器一起使用,即可建立一個純數(shù)字的高清傳輸界面,以實現(xiàn)車載高清顯示、百萬像素視頻傳感器以及雙向通訊等應(yīng)用中的音視頻以及控制數(shù)據(jù)的同步傳輸。
AIM916接受來自單個差分STP對或單個電纜的串行界面,即車載高清鏈路(AHDL)界面,并將其轉(zhuǎn)換為4路LVDS數(shù)據(jù)/控制流、一對LVDS時鐘以及I2S音頻數(shù)據(jù)。
AHDL 協(xié)議支持經(jīng)由單個差分STP對或單個電纜的全雙向通訊,即高速的正向數(shù)據(jù)傳輸通道和低速反向通訊通道。封包后的全音視頻數(shù)據(jù)和控制數(shù)據(jù)經(jīng)由單個差分STP對或單個電纜傳輸,可減少系統(tǒng)內(nèi)部連接,簡化系統(tǒng)設(shè)計并消除傳輸漂移。
車載高清鏈路協(xié)議(AHDL)協(xié)議內(nèi)植雙向控制協(xié)議,I2C以及GPIO的遠程控制模式下最高可以近乎0延遲地運行在5Mbits/s,從而賦能串行/解串器以及所連接的局域或遠程設(shè)備的遠程實時編程,并獨立于音視頻本身的時序。
AIM916滿足ISO10605以及IEC 61000-4-2 ESD 標準,并通過AEC Q100 2級認證。
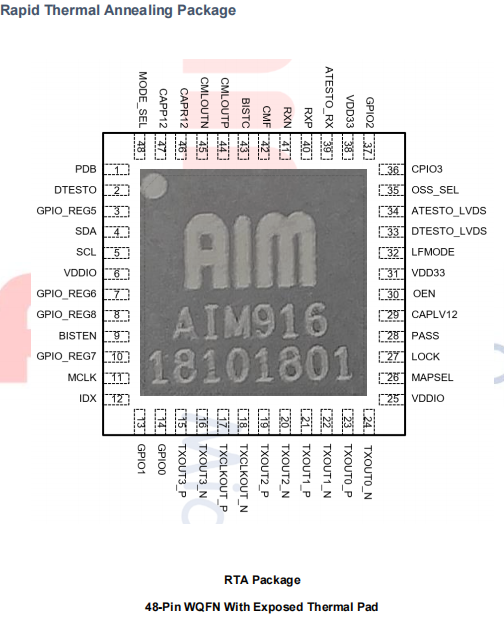
AIM916 為48-pin (7mm x 7mm) WQFN 封裝,0.5mm引線距并可運行在-45oC 至 +125oC的溫度范圍。
1 Description
The AIM916 is the first De-Serializer based on
Automotive High Definition Link (AHDL) protocol. In
conjunction with an AIM915 Serializer, a complete
high-speed digital interface, for concurrent
transmission of video, audio, and control data for
automotive HD display and megapixel image sensor
applications, is established.
The AIM916 receives and converts a single-signal
pair or single cable high-speed serialized interface,
the Automotive High Definition Link (AHDL), to four
LVDS data/control streams, one LVDS clock pair, and
I2S audio data. The AHDL protocol supports a full
duplex, high speed forward channel data transmission
and a low-speed reverse channel communication over
a single differential STP pair, or a single cable.
Packetizing all information of audio, video, and control
data over a single differential STP pair or a single
cable reduces the interconnectivity and simplifies
system design, while also eliminating skew issues.
The bi-directional control protocol, embedded in the
AHDL serial link protocol, operates up to 5Mbits/s for
I2C and GPIO remote control with near-zero latency,
allowing real-time programming of Serializer, de
Serializer, and any local or remote device attached,
independent of audio/video timing.
The AIM916 meets ISO10605 and IEC 61000-4-2
ESD standard, and AEC Q100 Grade2 qualified.
The AIM916 is available in a 48-pin (7mm x 7mm)
WQFN package with 0.5 lead pitch and operates over
temperature range from -45oC to +125oC.
5 應(yīng)用場景;
車載導(dǎo)航系統(tǒng)以及信息娛樂系統(tǒng)的ECU 至顯示屏連接
車載后排和駕駛員副座的信息娛樂系統(tǒng)
高級自動駕駛輔助系統(tǒng)(ADAS)
車載高清攝像系統(tǒng)
車載360o 環(huán)視系統(tǒng)
機器人系統(tǒng)
工業(yè)級視頻傳輸和控制系統(tǒng)
簡化的應(yīng)用框圖;
6 功能及優(yōu)勢;
車輛智能顯示系統(tǒng);
雙向控制通道界面與I2C串行控制總線
兼容;強健的EMI/EMC 容忍以及極小的功耗
業(yè)內(nèi)最優(yōu)的DC平衡和數(shù)據(jù)加擾構(gòu)架
最小功耗:65mA
最優(yōu)化供電電流:60mA
單端3.3V 供電,同時支持1.8V或者3.3V 兼容的I/O 界面
全速下交流耦合的SPT線(100 Ω)或電纜線(50 Ω )的鏈接線纜長度可達10米
48-Pin (7mmx7mm) WQFN 封 裝 ,0.5 引線距
高速正向AHDL通道;
高清視頻顯示可達1080p60線速率可達3.4 Gbits/s
支持15MHz至95MHz的PCLK
支 持 RGB888, RGB565, YUV422,
YUV444, VS, HS, DE 以及I2 S 等音視頻格式
支持7.1CH環(huán)繞立體聲所需的4路I2S數(shù)字音頻輸入
內(nèi)置PRBS 模式發(fā)生器,支持BER測試、連接質(zhì)量測試
內(nèi)置彩條發(fā)生器,支持連接測試及評估
強健的雙向控制通道;
自適應(yīng)電纜平衡匹配
遠程命令、局域或遠程訪問速率最高可達5Mbit/s
兩個通用I/O通道專用管腳,支持4個雙向通用I/O通道
符合標準;
符合AEC Q100 的2級認證
HBM 模式下耐壓 >8-kV ;
符合 ISO10605 以及ISO 61000-4-2 ESD 評級
以上是AIM916是首款基于車載高清鏈路協(xié)議(AHDL)的解串器替換TI916一起交流廣大電子好友歡迎過來指導(dǎo)工作共同進步.
-
數(shù)據(jù)鏈路層
+關(guān)注
關(guān)注
0文章
61瀏覽量
12166 -
解串器
+關(guān)注
關(guān)注
1文章
139瀏覽量
14062
發(fā)布評論請先 登錄
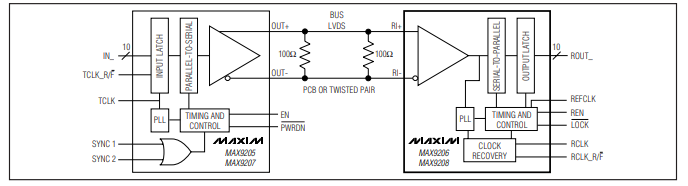
MAX9206/MAX9208 10位總線LVDS解串器技術(shù)手冊
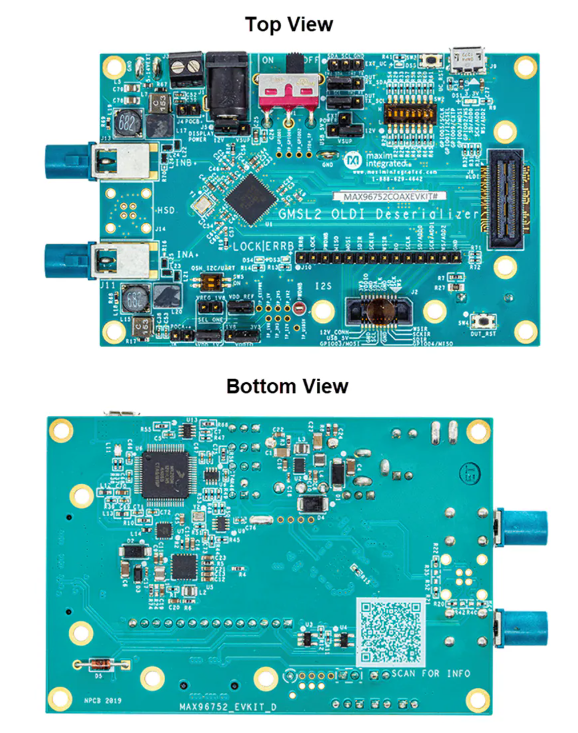
Analog Devices / Maxim Integrated MAX96752xEVKIT解串器評估套件數(shù)據(jù)手冊
NVMe協(xié)議簡要分析
傳感器網(wǎng)絡(luò)通信協(xié)議的核心技術(shù)要素

如何使用ZPS-CANFD觀察CAN數(shù)據(jù)鏈路層的工作過程

工業(yè)以太網(wǎng)中的數(shù)據(jù)鏈路層與工業(yè)交換機的關(guān)鍵作用

什么是ptp協(xié)議及其應(yīng)用
PCIE數(shù)據(jù)鏈路層架構(gòu)解析
CAN總線協(xié)議的數(shù)據(jù)鏈路層有哪些部分
DS92LV18 18位總線LVDS串行器/解串器數(shù)據(jù)表

DS92LV3241/3242 32位通道Link II串行器/解串器數(shù)據(jù)表
DS92LV1260六通道10位BLVDS解串器數(shù)據(jù)表
SN75LVDT1422 14位全雙工串行器/解串器數(shù)據(jù)表
LMH0341/041/071/051 SDI解串器數(shù)據(jù)表





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論