") Linux驅(qū)動開發(fā)-編寫MMA7660三軸加速度傳感器
Linux驅(qū)動開發(fā)-編寫MMA7660三軸加速度傳感器

【摘要】 通過MMA7660可以做出很多項目: 比如: 老人防跌倒手環(huán)、自行車自動剎車燈,智能鬧鐘,烤火爐跌倒自動斷電、運(yùn)動手環(huán)等等。 這篇文章就介紹如何在Linux下編寫MMA7660三軸加速度芯片的驅(qū)動,讀取當(dāng)前芯片的方向姿態(tài),得到X,Y,Z三個軸的數(shù)據(jù)。MMA7660是IIC接口的,當(dāng)前驅(qū)動就采用標(biāo)準(zhǔn)的IIC子系統(tǒng)編寫驅(qū)動,使用字符設(shè)備框架將得到的數(shù)據(jù)上傳遞給應(yīng)用層。
1. MMA7660芯片介紹
MMA7660FC 是 ± 1.5 克的三軸數(shù)字輸出、超低功率、緊湊型電容式微電機(jī)的三軸加速度計,是非常低功耗,小型容性 MEMS 的傳感器。具有低通濾波器,用于偏移和增益誤差補(bǔ)償, 以及用戶可配置的轉(zhuǎn)換成 6 位分辨率,用戶可配置輸出速率等功能。MMA7660芯片可以通過中斷引腳(INT)向外通知傳感器數(shù)據(jù)變化、方向、姿態(tài)識別等信息。模擬工作電壓范圍是 2.4V 至 3.6V,數(shù)字工作電壓范圍是 1.71V 到 3.6V 。常用在手機(jī)、掌上電腦、車載導(dǎo)航,便攜式電腦的防盜,自動自行車剎車燈、運(yùn)動檢測手環(huán)、數(shù)碼機(jī)、自動叫醒鬧鐘里等等。
特別是計步的功能是現(xiàn)在最常見,不管是智能手環(huán)、還是手機(jī)都帶有三軸加速度計,可以記錄每天的步數(shù),計算運(yùn)動量等。現(xiàn)在很多的不倒翁,無人機(jī)、相機(jī)云臺,很多常見的產(chǎn)品里都能看到三軸加速計的身影。
通過MMA7660可以做出很多項目: 比如: 老人防跌倒手環(huán)、自行車自動剎車燈,智能鬧鐘,烤火爐跌倒自動斷電、運(yùn)動手環(huán)等等。
這篇文章就介紹如何在Linux下編寫MMA7660三軸加速度芯片的驅(qū)動,讀取當(dāng)前芯片的方向姿態(tài),得到X,Y,Z三個軸的數(shù)據(jù)。MMA7660是IIC接口的,當(dāng)前驅(qū)動就采用標(biāo)準(zhǔn)的IIC子系統(tǒng)編寫驅(qū)動,使用字符設(shè)備框架將得到的數(shù)據(jù)上傳遞給應(yīng)用層。
2. 硬件連線
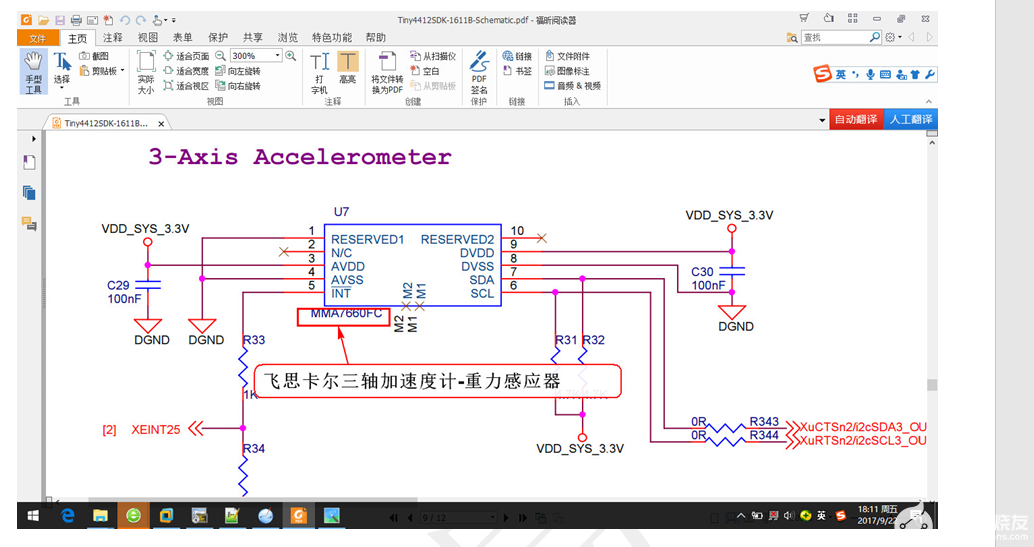
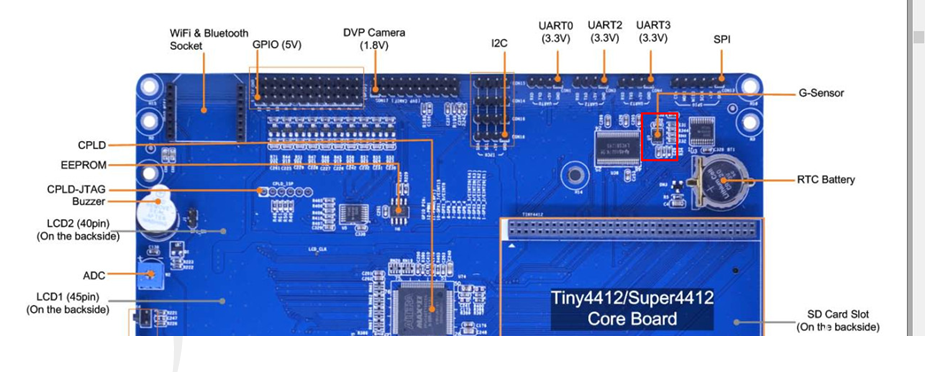
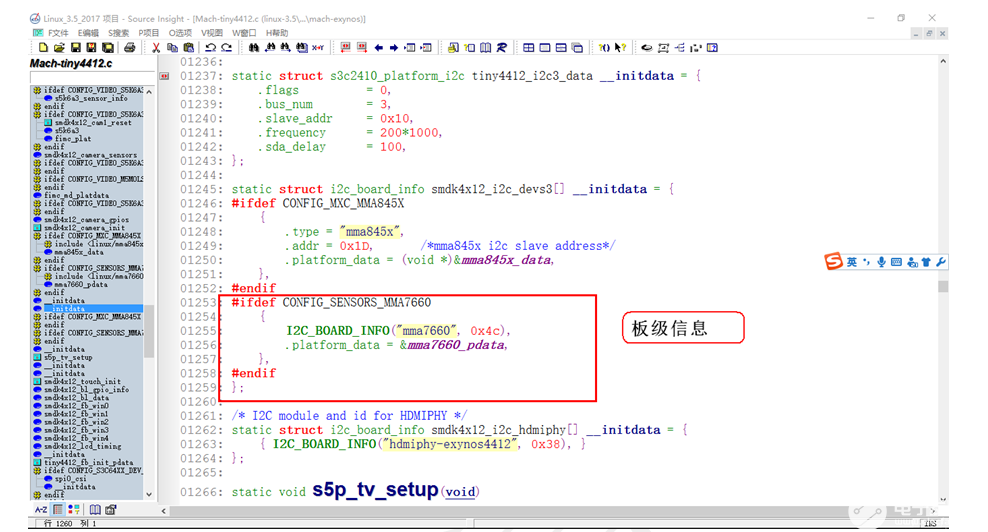
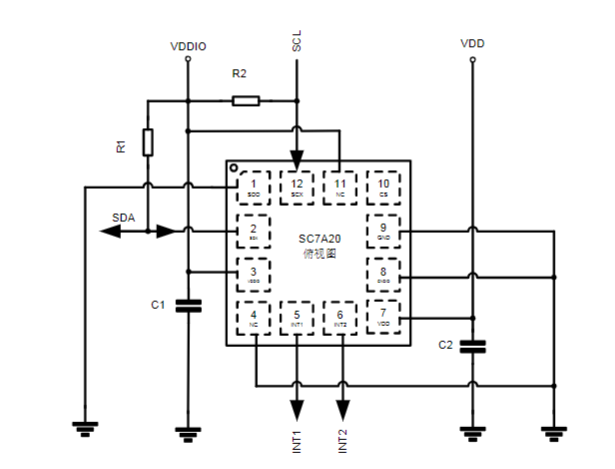
當(dāng)前使用的開發(fā)板是友善之臂Tiny4412開發(fā)板,使用三星EXYNOS4412芯片,板子本身自帶了一顆MMA7660芯片,芯片的原理圖如下:

內(nèi)核本身有MMA7660的驅(qū)動,下面是源碼的路徑:
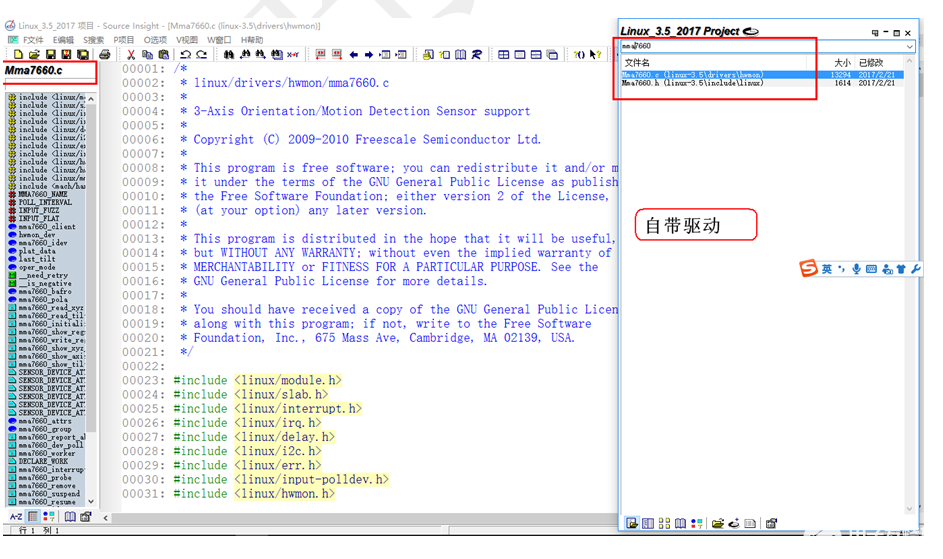
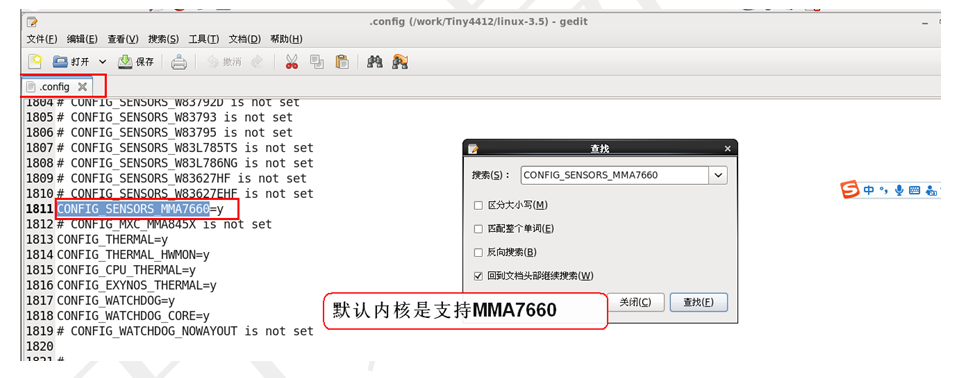
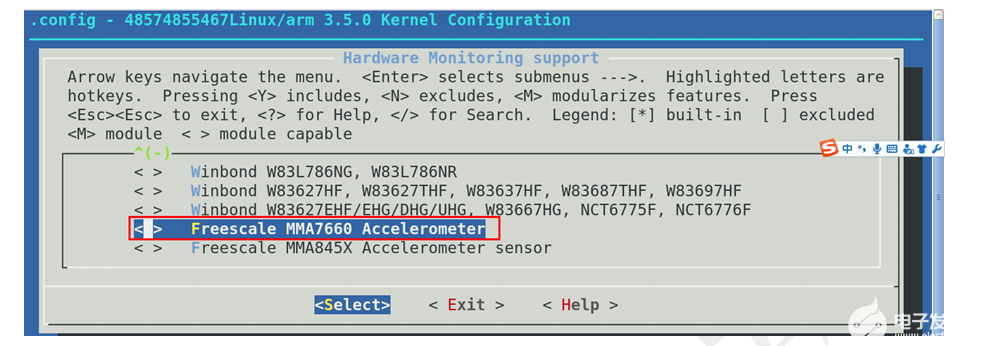
如果加載自己編寫的驅(qū)動,還需要去掉原來內(nèi)核自帶的驅(qū)動,不然無法匹配。
Device Drivers --->
<*> Hardware Monitoring support --->
<*> Freescale MMA7660 Accelerometer (將*號去掉,編譯內(nèi)核、燒寫內(nèi)核即可)
3. 源代碼
3.1 mma7660設(shè)備端代碼: IIC子系統(tǒng)
#include
#include
#include
#include
#include
#include
#include
static struct i2c_client *i2cClient = NULL;
static unsigned short i2c_addr_list[]= {0x4c, I2C_CLIENT_END};/*地址隊列*/
/*
1. 獲取控制器(總線)
2. 探測設(shè)備是否存在
3. 定義一個名字用于找到驅(qū)動端
*/
static int __init mma7660_dev_init(void)
{
/*mach-tiny4412.c*/
struct i2c_adapter *i2c_adap=NULL; /*獲取到的總線存放在這個結(jié)構(gòu)體*/
struct i2c_board_info i2c_info; /*設(shè)備描述結(jié)構(gòu)體,里面存放著設(shè)備的名字還有地址*/
/*1. 獲取IIC控制器*/
i2c_adap = i2c_get_adapter(3); /*要使用IIC_3號總線*/
if(!i2c_adap)
{
printk("獲取IIC控制器信息失敗!\n");
return -1;
}
memset(&i2c_info,0,sizeof(struct i2c_board_info)); /*清空結(jié)構(gòu)體*/
strlcpy(i2c_info.type,"mma7660_drv",I2C_NAME_SIZE); /*名稱的賦值*/
i2c_info.irq=EXYNOS4_GPX3(1); /*中斷IO口*/
/*2. 創(chuàng)建IIC設(shè)備客戶端*/
i2cClient = i2c_new_probed_device(i2c_adap,&i2c_info,i2c_addr_list,NULL);
if(!i2cClient)
{
printk("mma7660_探測地址出現(xiàn)錯誤!!\n");
return -1;
}
i2c_put_adapter(i2c_adap);/*設(shè)置模塊使用計數(shù)*/
printk("mma7660_dev_init!!\n");
return 0;
}
static void __exit mma7660_dev_exit(void)//平臺設(shè)備端的出口函數(shù)
{
printk(" mma7660_dev_exit ok!!\n");
/*注銷設(shè)備*/
i2c_unregister_device(i2cClient);
/*釋放*/
i2c_release_client(i2cClient);
}
module_init(mma7660_dev_init);
module_exit(mma7660_dev_exit);
MODULE_LICENSE("GPL");
3.2 mma7660驅(qū)動端代碼: IIC子系統(tǒng)
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
/* MMA7760 Registers */
#define MMA7660_XOUT 0x00 // 6-bit output value X
#define MMA7660_YOUT 0x01 // 6-bit output value Y
#define MMA7660_ZOUT 0x02 // 6-bit output value Z
#define MMA7660_TILT 0x03 // Tilt status
#define MMA7660_SRST 0x04 // Sampling Rate Status
#define MMA7660_SPCNT 0x05 // Sleep Count
#define MMA7660_INTSU 0x06 // Interrupt Setup
#define MMA7660_MODE 0x07 // Mode
#define MMA7660_SR 0x08 // Auto-Wake/Sleep and Debounce Filter
#define MMA7660_PDET 0x09 // Tap Detection
#define MMA7660_PD 0x0a // Tap Debounce Count
static const struct i2c_device_id mma7660_id[] =
{
{"mma7660_drv",0}, /*設(shè)備端的名字,0表示不需要私有數(shù)據(jù)*/
{}
};
static u32 mma7660_irq; /*觸摸屏的中斷編號*/
static struct i2c_client *mma7660_client=NULL;
static int last_tilt = 0;
#define __need_retry(__v) (__v & (1 << 6))
#define __is_negative(__v) (__v & (1 << 5))
static const char *mma7660_bafro[] = {
"未知", "前面", "背面"
};
static const char *mma7660_pola[] = {
"未知",
"左面", "向右",
"保留", "保留",
"向下", "向上",
"保留",
};
/*
函數(shù)功能:讀取一個字節(jié)的數(shù)據(jù)
*/
static int mma7660_read_tilt(struct i2c_client *client, int *tilt)
{
int val;
do {
val = i2c_smbus_read_byte_data(client, MMA7660_TILT);
} while (__need_retry(val));
*tilt = (val & 0xff);
return 0;
}
/*
函數(shù)功能: 讀取XYZ坐標(biāo)數(shù)據(jù)
*/
static int mma7660_read_xyz(struct i2c_client *client, int idx, int *xyz)
{
int val;
do {
val = i2c_smbus_read_byte_data(client, idx + MMA7660_XOUT);
} while (__need_retry(val));
*xyz = __is_negative(val) ? (val | ~0x3f) : (val & 0x3f);
return 0;
}
/*
工作隊列處理函數(shù)
*/
static void mma7660_worker(struct work_struct *work)
{
int bafro, pola, shake, tap;
int val = 0;
mma7660_read_tilt(mma7660_client,&val);
/* TODO: report it ? */
bafro = val & 0x03;
if (bafro != (last_tilt & 0x03)) {
printk("%s\n", mma7660_bafro[bafro]);
}
pola = (val >> 2) & 0x07;
if (pola != ((last_tilt >> 2) & 0x07)) {
printk("%s\n", mma7660_pola[pola]);
}
shake = (val >> 5) & 0x01;
if (shake && shake != ((last_tilt >> 5) & 0x01)) {
printk("Shake\n");
}
tap = (val >> 7) & 0x01;
if (tap && tap != ((last_tilt >> 7) & 0x01)) {
printk("Tap\n");
}
/* Save current status */
last_tilt = val;
int axis[3];
int i;
for (i = 0; i < 3; i++)
{
mma7660_read_xyz(mma7660_client, i, &axis[i]);
}
printk("ABS_X=%d\n",axis[0]);
printk("ABS_Y=%d\n",axis[1]);
printk("ABS_Z=%d\n",axis[2]);
}
/*
函數(shù)功能: mma7660初始化
*/
static int mma7660_initialize(struct i2c_client *client)
{
int val;
/* Using test mode to probe chip */
i2c_smbus_write_byte_data(client, MMA7660_MODE, 0x00);
mdelay(10);
i2c_smbus_write_byte_data(client, MMA7660_MODE, 0x04);
mdelay(10);
i2c_smbus_write_byte_data(client, MMA7660_XOUT, 0x3f);
i2c_smbus_write_byte_data(client, MMA7660_YOUT, 0x01);
i2c_smbus_write_byte_data(client, MMA7660_ZOUT, 0x15);
val = i2c_smbus_read_byte_data(client, MMA7660_ZOUT);
if (val != 0x15) {
dev_err(&client->dev, "no device\n");
return -ENODEV;
}
/* Goto standby mode for configuration */
i2c_smbus_write_byte_data(client, MMA7660_MODE, 0x00);
mdelay(10);
/* Sample rate: 64Hz / 16Hz; Filt: 3 samples */
i2c_smbus_write_byte_data(client, MMA7660_SR, ((2<<5) | (1<<3) | 1));
/* Sleep count */
i2c_smbus_write_byte_data(client, MMA7660_SPCNT, 0xA0);
/* Tap detect and debounce ~4ms */
i2c_smbus_write_byte_data(client, MMA7660_PDET, 4);
i2c_smbus_write_byte_data(client, MMA7660_PD, 15);
/* Enable interrupt except exiting Auto-Sleep */
i2c_smbus_write_byte_data(client, MMA7660_INTSU, 0xe7);
/* IPP, Auto-wake, auto-sleep and standby */
i2c_smbus_write_byte_data(client, MMA7660_MODE, 0x59);
mdelay(10);
/* Save current tilt status */
mma7660_read_tilt(client, &last_tilt);
mma7660_client = client;
return 0;
}
/*
靜態(tài)方式初始化工作隊列
*/
DECLARE_WORK(mma7660_work,mma7660_worker);
static irqreturn_t mma7660_interrupt(int irq, void *dev_id)
{
/*調(diào)度共享工作隊列*/
schedule_work(&mma7660_work);
return IRQ_HANDLED;
}
/*
匹配成功時調(diào)用
*/
static int mma7660_probe(struct i2c_client *client, const struct i2c_device_id *device_id)
{
printk("mma7660_probe!!!\n");
printk("驅(qū)動端IIC匹配的地址=0x%x\n",client->addr);
mma7660_client=client;
/*1. 注冊中斷*/
mma7660_irq=gpio_to_irq(client->irq);/*獲取中斷編號*/
if(request_irq(mma7660_irq,mma7660_interrupt,IRQF_TRIGGER_FALLING,"mma7660_irq",NULL)!=0)
{
printk("mma7660_中斷注冊失敗!\n");
}
/*2. 初始化mma7660*/
if(mma7660_initialize(client) < 0)
{
printk(" 初始化mma7660失敗!\n");
}
return 0;
}
static int mma7660_remove(struct i2c_client *client)
{
free_irq(mma7660_irq,NULL);
printk("mma7660_remove!!!\n");
return 0;
}
struct i2c_driver i2c_drv =
{
.driver =
{
.name = "mma7660",
.owner = THIS_MODULE,
},
.probe = mma7660_probe, //探測函數(shù)
.remove = mma7660_remove, //資源卸載
.id_table = mma7660_id, //里面有一個名字的參數(shù)用來匹配設(shè)備端名字
};
static int __init mma7660_drv_init(void)
{
/*向iic總線注冊一個驅(qū)動*/
i2c_add_driver(&i2c_drv);
return 0;
}
static void __exit mma7660_drv_exit(void)
{
/*從iic總線注銷一個驅(qū)動*/
i2c_del_driver(&i2c_drv);
}
module_init(mma7660_drv_init);
module_exit(mma7660_drv_exit);
MODULE_LICENSE("GPL");
-
Linux
+關(guān)注
關(guān)注
87文章
11511瀏覽量
213824 -
加速度傳感器
+關(guān)注
關(guān)注
12文章
479瀏覽量
55853 -
mma7660
+關(guān)注
關(guān)注
0文章
3瀏覽量
7431
發(fā)布評論請先 登錄
加速度傳感器的應(yīng)用與選購技巧

加速度傳感器的選型?主要看這八大參數(shù)!
加速度傳感器的工作原理

十軸姿態(tài)傳感器模塊 | 集成加速度計、陀螺儀、磁力計,自帶BLE5.0藍(lán)牙

什么是雙軸傾角傳感器
ZC1202速度傳感器溫度傳感器視覺傳感器加速度傳感器的作用
加速度傳感器的應(yīng)用

物聯(lián)網(wǎng)系統(tǒng)中加速度測試方案的實(shí)現(xiàn)_加速度傳感器分析
聯(lián)網(wǎng)行業(yè)中的三軸加速度傳感器軟件設(shè)計_SSD1315設(shè)計詳解

XC1011SD (X2E0000210002) 愛普生汽車用角速度_加速度組合傳感器選型資料
e2studio開發(fā)三軸加速度計LIS2DW12(4)----測量傾斜度

e2studio開發(fā)三軸加速度計LIS2DW12(1)----輪詢獲取加速度數(shù)據(jù)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論