") 汽車軟件系統(tǒng)剖析及未來(lái)展望
汽車軟件系統(tǒng)剖析及未來(lái)展望

跨入汽車,按下啟停鍵,你點(diǎn)燃汽車動(dòng)力核心,儀表亮起。掛擋,踩滿油門,你感受到十足的推背感。高速上,打開(kāi)自動(dòng)巡航,汽車駕駛輔助系統(tǒng)為你接管大部分行駛功能。到達(dá)目的地,按下自動(dòng)泊車,汽車自主轉(zhuǎn)動(dòng)方向盤控制油門進(jìn)入車位。這些年來(lái),你能感受到汽車新功能帶來(lái)的駕駛樂(lè)趣和出行便利,你能看到駕駛室內(nèi)日漸豐富的中控系統(tǒng)。而在汽車炫酷的外表下,你看不見(jiàn)的是:
上百個(gè)電子控制單元中循環(huán)執(zhí)行的代碼功能塊在連接各電控單元的線束中不斷穿梭的電子信號(hào)終端執(zhí)行器在接受電子指令后的精準(zhǔn)運(yùn)作以及遍布汽車各個(gè)角落的傳感器和實(shí)時(shí)傳回的感知數(shù)據(jù)。
這套隱形而強(qiáng)大的系統(tǒng)就是汽車軟件系統(tǒng)。它同硬件系統(tǒng)一道實(shí)時(shí)獲取、理解駕駛員需求,通過(guò)邏輯運(yùn)算得出機(jī)械部件需要做出的響應(yīng)并發(fā)出指令。軟件、硬件相互合作,它們一同組成了汽車電子系統(tǒng)。
年輕卻迅猛發(fā)展的汽車電子
如今,隨著汽車電子化、智能化和互聯(lián)化的不斷推進(jìn),汽車軟件系統(tǒng)的功能越發(fā)可靠和多樣。回想1950年,當(dāng)時(shí)豪華車搭載的電子設(shè)備屈指可數(shù):?jiǎn)?dòng)機(jī)、電池、車燈、轉(zhuǎn)向燈和火花塞。只要40根銅導(dǎo)線就可以滿足整車的電子部件通信和電能供給。如今普及的大型車載互動(dòng)屏幕在當(dāng)時(shí)是不可想象的,那個(gè)年代收音機(jī)是車載娛樂(lè)系統(tǒng)的全部。為了力保這唯一的多媒體設(shè)備能夠正常工作,外置收音天線成為整車中要求最高的一根電線:畢竟它要在車外風(fēng)吹雨淋,工作環(huán)境嚴(yán)苛。
1980年代隨著IT技術(shù)的起步和興起,在當(dāng)時(shí)機(jī)械主宰的汽車行業(yè)內(nèi)掀起了一場(chǎng)電子電氣化革命。今天汽車標(biāo)配的安全氣囊、防抱死系統(tǒng)ABS、車輛穩(wěn)定系統(tǒng)ESP、發(fā)動(dòng)機(jī)電控系統(tǒng)和導(dǎo)航系統(tǒng)都集中誕生于那個(gè)年代。搭載軟件系統(tǒng)的電子控制器開(kāi)始在車上出現(xiàn)。隨著控制器數(shù)量逐漸增多,不同控制器之間的通信問(wèn)題亟需解決,如今人們熟悉的CAN總線、LIN總線等應(yīng)運(yùn)而生。
1990年,用于發(fā)動(dòng)機(jī)管理和防抱死系統(tǒng)的電子控制器成為所有汽車的標(biāo)準(zhǔn)配置,軟件成為汽車的重要組成部分,整車廠也逐漸意識(shí)到因?yàn)橥ㄐ趴偩€不斷延長(zhǎng)而日益升高的成本。2000年奔馳S級(jí)轎車的電子系統(tǒng)已經(jīng)擁有80個(gè)電控單元,1900條總長(zhǎng)達(dá)4km的通信總線。2007年奧迪Q7和保時(shí)捷卡宴的總線長(zhǎng)度突破6km。
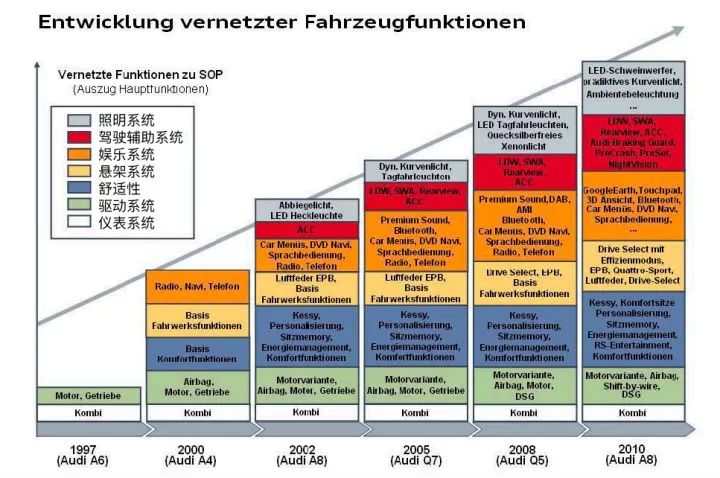
汽車各大系統(tǒng)的軟件功能逐年快速增
長(zhǎng)在這些硬件數(shù)量爆發(fā)的背后,究其根本原因是汽車業(yè)需要滿足客戶逐漸提高的駕駛性和舒適性需求,同時(shí)要滿足一系列汽車安全性能行業(yè)標(biāo)準(zhǔn)。上圖可以看到,以?shī)W迪為例,汽車各大系統(tǒng)的軟件功能逐年快速增長(zhǎng)。軟件系統(tǒng)越做越大,越做越復(fù)雜,硬件系統(tǒng)跟著齊頭并進(jìn)。
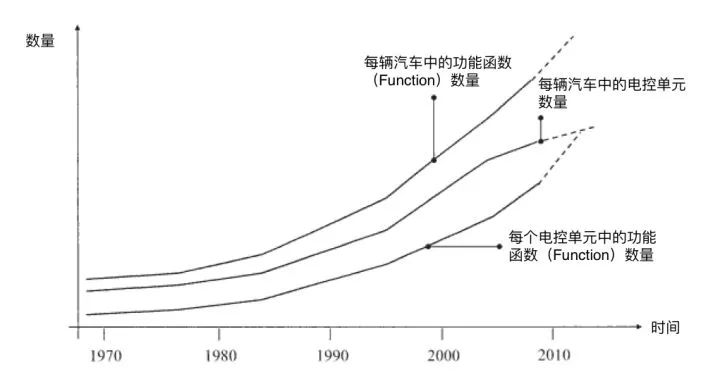
下圖可以看到軟件系統(tǒng)最小單元“功能函數(shù)”的總數(shù)隨著時(shí)間推進(jìn),迅速增長(zhǎng)。但是電子控制器的數(shù)量卻在2010年前后開(kāi)始放慢增長(zhǎng)。這是因?yàn)樵絹?lái)越多的控制器,急劇增加了整車成本。整車廠面對(duì)成本壓力不得不開(kāi)始考慮應(yīng)對(duì)策略,逐步將小型控制器集成到一個(gè)大型控制器。汽車電子系統(tǒng)從分散化轉(zhuǎn)向集中化,減少控制器數(shù)量,降低總線長(zhǎng)度,從而降低成本。
離不開(kāi)硬件的軟件
為了理解,為什么軟件、硬件不能分家,只有組合在一起才可以組成汽車電子系統(tǒng),我們需要首先搞明白汽車是如何與駕駛員和環(huán)境互動(dòng)的。
下圖是一個(gè)抽象出來(lái)的控制模型。駕駛員通過(guò)方向盤、踏板和換擋桿等給出期望(W*)操控汽車。這一系列實(shí)實(shí)在在、看得見(jiàn)摸得著的期望被轉(zhuǎn)化為抽象的電子信號(hào)(W)進(jìn)入電控單元。隨后電控單元通過(guò)比較駕駛員期望(W)和傳感器傳回的當(dāng)前實(shí)際值(R)進(jìn)行對(duì)比。若對(duì)比發(fā)現(xiàn),期望與現(xiàn)實(shí)存在差距,電控單元中的軟件程序會(huì)通過(guò)邏輯計(jì)算給出指令(U)操控執(zhí)行器做出響應(yīng)(Y)。控制對(duì)象在執(zhí)行器的動(dòng)作和環(huán)境的影響(Z)下,開(kāi)始做出駕駛員期待的反應(yīng)(X)。這一反應(yīng)(X)又會(huì)通過(guò)傳感器監(jiān)控、感知,當(dāng)前狀態(tài)(R)將再次返回電控單元完成控制閉合回路。
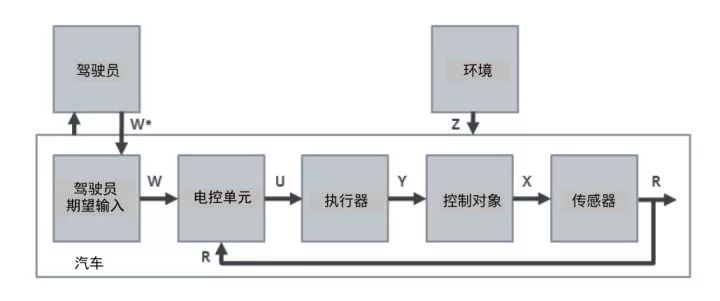
控制模型
聽(tīng)起來(lái)十分復(fù)雜抽象,這里舉一個(gè)剎車輔助系統(tǒng)的例子來(lái)說(shuō)明。緊急剎車時(shí),如果駕駛員腳力不足或反應(yīng)較慢,沒(méi)有及時(shí)將剎車完全踩死、踩滿會(huì)導(dǎo)致剎車系統(tǒng)無(wú)法全力工作,在這種情況下這套系統(tǒng)就將被激活。在駕駛員剎車踏板輸入不變的前提下,自動(dòng)提高制動(dòng)力使汽車更快減速。
例如,行車中遇到緊急情況,駕駛員抬起油門后,快速用力地踩下剎車踏板期望汽車迅速減速(W*)。剎車踏板通過(guò)采集踏板值變化率、踏板受力等信號(hào)(W)得到駕駛員踩剎車踏板的輕重、緩急等信息,理解駕駛員意圖。W作為電子信號(hào)傳入相應(yīng)的電控單元中。同樣傳入電控單元的還有傳感器的實(shí)時(shí)測(cè)量數(shù)據(jù)(R),例如當(dāng)前輪胎轉(zhuǎn)速或車速。若軟件通過(guò)比較發(fā)現(xiàn),當(dāng)前輪速高、車速快、減速度不足,駕駛員踩下的剎車踏板深度不足以讓剎車系統(tǒng)發(fā)揮出最大功能,最終得出液壓制動(dòng)系統(tǒng)需要進(jìn)一步剎車的結(jié)論(U)。

電子控制單元
位于輪胎附近的制動(dòng)卡鉗接到指令(U)開(kāi)始工作讓輪胎轉(zhuǎn)速變慢。結(jié)果由于路面結(jié)冰的影響(Z)車輪在強(qiáng)制動(dòng)力的作用下開(kāi)始抱死打滑,一系列制動(dòng)工作沒(méi)有讓汽車達(dá)到預(yù)期的減速效果。傳感器將發(fā)生的這一切以電子信號(hào)的形式通過(guò)通信線束(R)實(shí)時(shí)傳回電控單元。軟件邏輯將因此激活防抱死系統(tǒng)ABS,操控制動(dòng)系統(tǒng)做出響應(yīng)并不斷接受傳感器的控制反饋,最終達(dá)到讓汽車減速這一駕駛員期望。這一次次的控制,在電控單元中以10ms甚至更快的速度循環(huán)進(jìn)行著。

電子控制單元及其剖面圖
以上是一個(gè)十分簡(jiǎn)單的電控例子,只有一個(gè)電控單元參與其中。而現(xiàn)如今許多復(fù)雜的汽車功能常常需要由多個(gè)電控單元、多個(gè)傳感器聯(lián)合控制才能實(shí)現(xiàn)。例如自適應(yīng)定速巡航功能ACC,駕駛員通過(guò)設(shè)定期望巡航速度、與前車保持的期望距離等實(shí)現(xiàn)駕駛輔助系統(tǒng)一定程度上接管汽車的功能。這一功能就需要多個(gè)電控單元協(xié)作完成并且通過(guò)總線讓它們隨時(shí)保持通信聯(lián)系。ACC控制器、雷達(dá)控制器、發(fā)動(dòng)機(jī)控制器、ESP控制器、變速箱控制器、人機(jī)交互控制器以及數(shù)不清的傳感器和執(zhí)行器都將參與其中。可以說(shuō),軟件和硬件系統(tǒng)相互合作,共同為汽車創(chuàng)造出一個(gè)個(gè)新的功能奇跡。
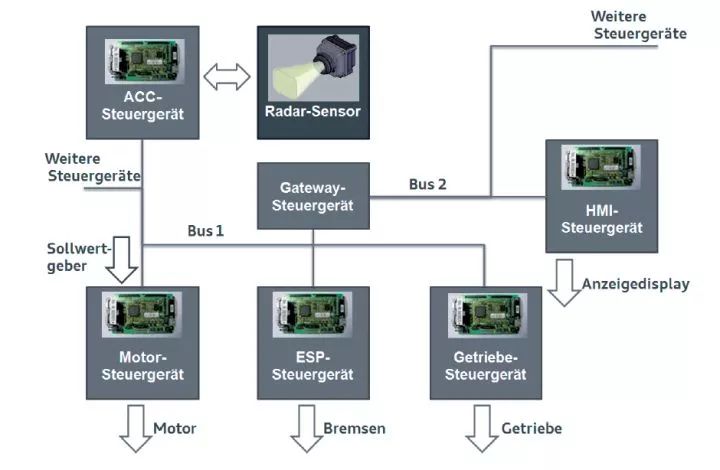
自適應(yīng)定速巡航功能ACC控制網(wǎng)絡(luò)
軟件系統(tǒng)如何從無(wú)到有
急劇攀升的軟件代碼量、龐雜的總線通信導(dǎo)致汽車電子系統(tǒng)日漸復(fù)雜。根據(jù)ADAC(全德汽車俱樂(lè)部,德國(guó)最大的交通協(xié)會(huì))統(tǒng)計(jì),德國(guó)2004年有40%的車輛故障最終歸咎于軟件問(wèn)題或電子部件故障。為此,必須在保證電子系統(tǒng)整體可控的前提下研發(fā)新功能,軟件工程師絕不能容忍自己迷失在親手創(chuàng)建的龐大系統(tǒng)中。正如汽車行業(yè)的那句老話:Divide et Impera!維基百科對(duì)應(yīng)的中文詞條將它翻譯為“分而治之”。德語(yǔ)將這句拉丁語(yǔ)翻譯為Teile und beherssche!,直接譯為中文是拆解和掌控。
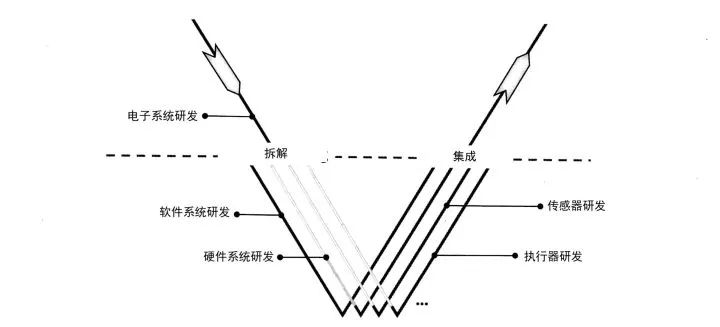
首先,如上圖所示將電子系統(tǒng)研發(fā)拆解為軟件系統(tǒng)、硬件系統(tǒng)、傳感器和執(zhí)行器研發(fā)四大部分,經(jīng)過(guò)V模型流程研發(fā),最終再次集成。這個(gè)V模型涵蓋了從系統(tǒng)層面到軟件層面以及集成后的功能測(cè)試和系統(tǒng)測(cè)試等流程,是當(dāng)今汽車行業(yè)廣泛應(yīng)用的開(kāi)發(fā)流程。因?yàn)槠湫螤钊缱帜竀而因此得名。下面將以下圖所示的軟件系統(tǒng)開(kāi)發(fā)為例,分步驟介紹V模型。
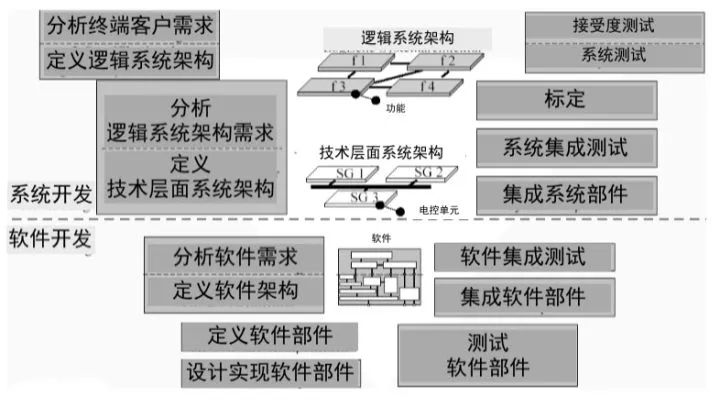
1.分析終端客戶需求、定義邏輯系統(tǒng)架構(gòu)
這一步是根據(jù)終端客戶的需求以及法規(guī)需求定義出整車軟件系統(tǒng)的邏輯架構(gòu)。其中包含各大功能塊的定義,功能塊接口定義和功能塊之間的通信定義。這一步僅考慮滿足原始需求,不會(huì)涉及任何技術(shù)層面的具體分析。
2. 分析邏輯系統(tǒng)架構(gòu)需求、定義技術(shù)層面系統(tǒng)架構(gòu)
邏輯系統(tǒng)架構(gòu)為定義具體的技術(shù)層面系統(tǒng)架構(gòu)提供了基礎(chǔ)。在這一步中開(kāi)始討論具體的技術(shù)問(wèn)題,哪些功能將通過(guò)軟件實(shí)現(xiàn)、軟件塊分裝在哪些電子控制單元以及電控單元之間采用什么通信協(xié)議等等。軟件系統(tǒng)初現(xiàn)雛形。
3. 分析軟件需求、定義軟件架構(gòu)
這里開(kāi)始具體到電控單元中對(duì)于軟件本身的需求分析。根據(jù)需求,定義出合適的軟件架構(gòu)。同時(shí),還要考慮電控單元存儲(chǔ)資源的最優(yōu)使用、為滿足安全法規(guī)的冗余系統(tǒng)設(shè)計(jì)等等。這里,會(huì)把軟件進(jìn)一步細(xì)分為更小的軟件部件,定義各個(gè)部件之間的接口、分層和邊界。
4. 定義軟件部件
針對(duì)每個(gè)軟件部件會(huì)繼續(xù)定義出需求。這里的需求集中在功能層面,尚不考慮具體的軟件實(shí)現(xiàn)方式等。
5. 設(shè)計(jì)、實(shí)現(xiàn)及測(cè)試軟件部件
依據(jù)具體的需求,工程師開(kāi)始分別搭建不同的軟件部件。在前面一系列的拆解、分析和定義后,終于抵達(dá)了軟件最核心最具體的世界——代碼。與人們熟知的程序員直接寫代碼稍有區(qū)別,傳統(tǒng)的汽車軟件研發(fā)采用的是基于模型開(kāi)發(fā)。如下圖所示,邏輯運(yùn)算通過(guò)模型的方式表達(dá)出來(lái),相比于代碼更加直觀,便于日后的標(biāo)定工作和維護(hù)。在一個(gè)電控單元中,有上千個(gè)這樣的功能函數(shù),如下圖所示的功能模型組合到一起,會(huì)形成一份上萬(wàn)頁(yè)的文件。這份文件是接下來(lái)所有流程的基礎(chǔ)。
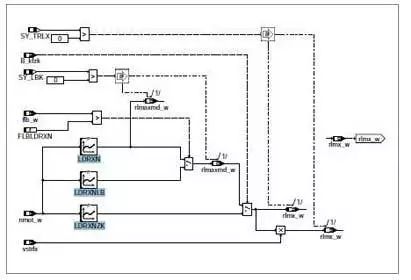
當(dāng)然這套模型只是工程師之間便于交流的高級(jí)語(yǔ)言,最終它們會(huì)被人工或計(jì)算機(jī)轉(zhuǎn)為代碼進(jìn)入控制器中工作。早年間,模型到代碼中間的轉(zhuǎn)換工作由人工完成。這造成的問(wèn)題是,代碼無(wú)法統(tǒng)一化和標(biāo)準(zhǔn)化。面對(duì)一個(gè)軟件邏輯模型,程序員可以用多種方法完成代碼編譯工作,達(dá)到同樣的功能效果。但是,代碼運(yùn)行所占用的硬件資源或嚴(yán)謹(jǐn)度會(huì)大不相同。因此,近年來(lái)轉(zhuǎn)碼工作逐漸被機(jī)器取代。軟件工程師事先定義標(biāo)準(zhǔn)的編譯規(guī)范,保證最終代碼統(tǒng)一和標(biāo)準(zhǔn)。
每一個(gè)軟件部件完成后,要進(jìn)行相應(yīng)的軟件測(cè)試。這里還不會(huì)聚焦功能層面的測(cè)試,僅僅針對(duì)軟件本身。例如軟件中是否因設(shè)計(jì)不當(dāng)產(chǎn)生死循環(huán)、每個(gè)信號(hào)定義的范圍是否恰當(dāng)、會(huì)不會(huì)造成溢出錯(cuò)誤或者會(huì)不會(huì)出現(xiàn)除以零的運(yùn)算情況等等。針對(duì)這些,工程師要事先定義測(cè)試方案,由計(jì)算機(jī)進(jìn)行全方位全覆蓋的軟件邏輯測(cè)試。例如,對(duì)于if, else語(yǔ)句需要把每一種可能的情況都測(cè)試檢查到。
6. 集成及測(cè)試軟件部件
單一軟件部件研發(fā)測(cè)試完成后,將它們集成到一起就形成了每個(gè)電控單元中完整的軟件包。這套軟件包在集成后依然需要測(cè)試,檢查各部件之間是否兼容,是否有開(kāi)放接口等等。
7. 系統(tǒng)集成及測(cè)試
當(dāng)軟件包集成測(cè)試結(jié)束,它們將被刷進(jìn)每一個(gè)電子控制器中。每個(gè)控制器與相應(yīng)的傳感器、執(zhí)行器等用線束相連,最后控制器之間接通總線通信。這樣整套電子系統(tǒng)終于誕生。如新生兒一般,這套系統(tǒng)依然十分脆弱和稚嫩,還有很大的潛力等待被開(kāi)發(fā)。
系統(tǒng)集成后的第一批測(cè)試往往是問(wèn)題重重。因?yàn)橄到y(tǒng)高度復(fù)雜,各個(gè)研發(fā)部件被分工研發(fā),即便之前有嚴(yán)格的測(cè)試流程,仍會(huì)有許多漏網(wǎng)之bug。如果分工研發(fā)的各部門之間沒(méi)有在開(kāi)發(fā)過(guò)程中充分交流,集成后可能會(huì)出現(xiàn)各類兼容性問(wèn)題。針對(duì)每一個(gè)問(wèn)題,工程師們都不會(huì)忘記前面提到的拆解和掌控。拆解表象問(wèn)題,找到根源,修復(fù)軟件bug,掌控整套系統(tǒng)。
8. 標(biāo)定
系統(tǒng)測(cè)試結(jié)束后將進(jìn)入軟件標(biāo)定階段,這也是軟件開(kāi)發(fā)中的重要階段。在軟件實(shí)現(xiàn)階段,工程師會(huì)在軟件中預(yù)留一些可標(biāo)定參數(shù)而不是固定的數(shù)值,等待標(biāo)定。這是基于成本考量,車型繁多的整車廠不可能為每款車型單獨(dú)開(kāi)發(fā)一套軟件系統(tǒng)。一般的解決方案是研發(fā)平臺(tái)軟件,適用于多款車型。然而每款車型都有自己的特點(diǎn),平臺(tái)軟件無(wú)法讓這些特點(diǎn)發(fā)光,標(biāo)定可以。通過(guò)改變不同的參數(shù)數(shù)值,可以讓車輛實(shí)現(xiàn)不同的駕駛性能,這也給了標(biāo)定工程師很大的發(fā)揮空間。
9. 系統(tǒng)測(cè)試及接受度測(cè)試
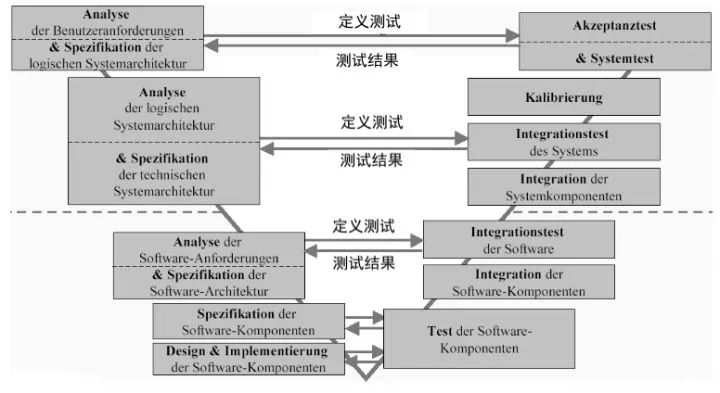
標(biāo)定完成后,就進(jìn)入了整套流程的最終階段。依據(jù)流程一開(kāi)始提出的需求,忽略那些具體的技術(shù)實(shí)現(xiàn)手段,站在整個(gè)系統(tǒng)的高度檢驗(yàn)它是否達(dá)到了終端客戶的需求。到了這一步,整套軟件系統(tǒng)已經(jīng)十分成熟。在正式進(jìn)入量產(chǎn)前會(huì)從一個(gè)時(shí)間點(diǎn)開(kāi)始,停止所有軟件和標(biāo)定變更,為最終量產(chǎn)做準(zhǔn)備。
整套V模型走下來(lái)可以看到,左側(cè)和右側(cè)的每個(gè)環(huán)節(jié)相互對(duì)應(yīng)。需求為定義測(cè)試方案提供基礎(chǔ),而測(cè)試結(jié)果又會(huì)帶動(dòng)進(jìn)一步的開(kāi)發(fā)和完善。
你或許會(huì)問(wèn),如果從V模型的左上角好不容易一路走到右上角,結(jié)果最后一步測(cè)試發(fā)現(xiàn)當(dāng)初第一步的系統(tǒng)構(gòu)架出了設(shè)計(jì)問(wèn)題,那豈不是為時(shí)已晚?難道還要一切重新來(lái)過(guò)?的確,軟件系統(tǒng)十分復(fù)雜,研發(fā)周期長(zhǎng)。如果只是沿著V模型慢慢悠悠從左到右走一遍,等最后一步才發(fā)現(xiàn)問(wèn)題,那確實(shí)一切都來(lái)不及了。因此,在實(shí)際研發(fā)中會(huì)持續(xù)不斷地集成、持續(xù)不斷地測(cè)試,工程師們會(huì)把V模型從左到右重復(fù)走許多遍。
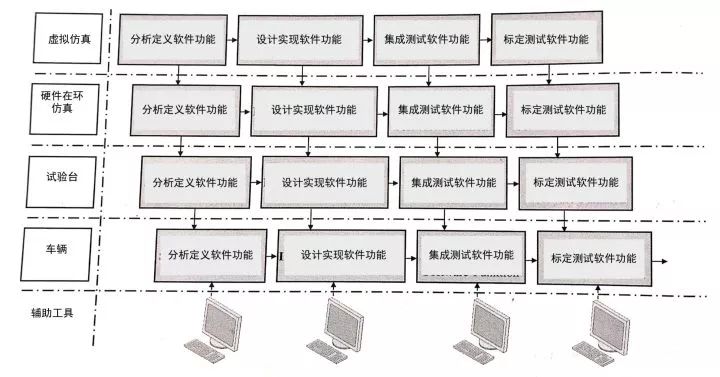
研發(fā)初期連原型車都還沒(méi)有的時(shí)候,軟件測(cè)試會(huì)依靠整車仿真系統(tǒng)在計(jì)算機(jī)中進(jìn)行,發(fā)動(dòng)機(jī)、變速箱、電子控制器、總線等都虛擬存在于工程師電腦中(SiL, Software in the Loop)。在仿真系統(tǒng)中,汽車可以如真實(shí)般開(kāi)動(dòng),模擬各種工況提供給工程師測(cè)試。
隨著車型研發(fā)推進(jìn),某些電子控制器研發(fā)完成,他們可以取代那些虛擬的電子控制器進(jìn)入測(cè)試環(huán)境,但是其他部件仍為虛擬仿真(HiL, Hardware in the Loop)。直到有一天,原型車研發(fā)完成,軟件集成和測(cè)試進(jìn)入試驗(yàn)臺(tái)架。最終,原型車調(diào)試完畢落地,軟件測(cè)試進(jìn)入實(shí)車階段。可以說(shuō),軟件開(kāi)發(fā)的起始點(diǎn)非常早,從虛擬到現(xiàn)實(shí)一路走來(lái),一直延續(xù)到最后的量產(chǎn)前夕。其實(shí)目的只有一個(gè),通過(guò)不斷集成和測(cè)試,盡可能發(fā)現(xiàn)所有問(wèn)題,保證汽車的駕駛性、舒適性和安全性。
汽車電子未來(lái)展望
毋庸置疑,汽車軟件的蓬勃發(fā)展必將持續(xù)下去。電動(dòng)汽車的興起,省去了機(jī)械加工復(fù)雜且精密的發(fā)動(dòng)機(jī),汽車廠商競(jìng)爭(zhēng)的重點(diǎn)從機(jī)械中轉(zhuǎn)移出來(lái)。為了讓產(chǎn)品更有吸引力更能脫穎而出,軟件因?yàn)槠溲邪l(fā)的靈活性,逐漸成為廠商間新的競(jìng)技場(chǎng)。
展望未來(lái),大型中央控制器將成為主流以減少分散在汽車各個(gè)角落的小型控制器,降低總線長(zhǎng)度。另外,速度更快、帶寬更大、傳輸信息更有效率的總線將逐漸成為行業(yè)新標(biāo)準(zhǔn)。5G通訊技術(shù)的興起會(huì)讓車聯(lián)網(wǎng)和更加炫酷的車載娛樂(lè)成為可能,而這一切都要依靠軟件的繼續(xù)發(fā)展。電子控制器中的軟件也將有可能在云端運(yùn)行,與汽車實(shí)時(shí)互動(dòng)溝通,這些都為軟件工程師們打開(kāi)了更廣闊的空間。
而不變的是,為了讓汽車能夠經(jīng)受住最嚴(yán)苛的環(huán)境考驗(yàn),汽車軟件工程師們將繼續(xù)如極客般完成軟件的標(biāo)定和測(cè)試。他們冬天穿梭在零下30度的北極圈內(nèi),與極光、麋鹿、雪松為伴。夏天在滾滾熱浪中,面對(duì)太陽(yáng)的炙烤,坐在尚未開(kāi)發(fā)完成的原型車內(nèi),將電腦與車輛相連進(jìn)行測(cè)試。汽車進(jìn)入緊急狀態(tài),空調(diào)失效時(shí)有發(fā)生。但這些都無(wú)法阻擋他們不斷突破科技極限、創(chuàng)造汽車未來(lái)的決心。因?yàn)椋?dāng)燈光亮起,幕布掀開(kāi),新車閃亮發(fā)布,世界為之鼓掌時(shí),這一切努力都將顯得意義非凡。
審核編輯:郭婷
-
控制器
+關(guān)注
關(guān)注
114文章
17088瀏覽量
184024 -
汽車電子
+關(guān)注
關(guān)注
3037文章
8340瀏覽量
170072 -
計(jì)算機(jī)
+關(guān)注
關(guān)注
19文章
7657瀏覽量
90682
原文標(biāo)題:汽車軟件系統(tǒng)剖析
文章出處:【微信號(hào):智能汽車電子與軟件,微信公眾號(hào):智能汽車電子與軟件】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
軟件定義汽車如何影響汽車行業(yè)

軟件定義汽車如何改變未來(lái)出行
電機(jī)系統(tǒng)節(jié)能關(guān)鍵技術(shù)及展望
解鎖未來(lái)汽車電子技術(shù):軟件定義車輛與區(qū)域架構(gòu)深度解析
光庭信息攜手QNX共同塑造軟件定義汽車的未來(lái)
J599 光纖連接器:行業(yè)深度剖析與未來(lái)展望
MCU在車載系統(tǒng)中的展望
英特爾塑造未來(lái)出行:AI增強(qiáng)型軟件定義汽車
risc-v芯片在電機(jī)領(lǐng)域的應(yīng)用展望
佛瑞亞對(duì)汽車電氣化的回顧與展望
重塑線控底盤技術(shù):自動(dòng)駕駛的未來(lái)支柱
嵌入式系統(tǒng)的未來(lái)趨勢(shì)有哪些?
點(diǎn)焊技術(shù)的未來(lái):市場(chǎng)動(dòng)向與創(chuàng)新展望
CC2340系統(tǒng)降低成本的方案剖析






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論