") FMCW地基雷達設備在橋梁監(jiān)測方面的應用
FMCW地基雷達設備在橋梁監(jiān)測方面的應用

摘要:針對高鐵橋梁傳統(tǒng)振動監(jiān)測方法過程復雜、成本高、精度低等問題,對鹽通高鐵橋梁的撓度監(jiān)測應用了基于FMCW 體制的地基毫米波雷達,該體制雷達操作方便、體積重量小、精度高、成本低。闡述了由雷達回波相位反演橋梁形變信息的基本原理,簡要介紹了其系統(tǒng)組成以及雷達參數(shù),展示并分析了在鹽通高鐵聯(lián)調聯(lián)試期間不同車速運行時 24 m 簡支梁跨中豎向動撓度監(jiān)測結果。數(shù)據(jù)結果表明:在一定的速度范圍內,隨著列車車速逐級提升,橋梁跨中位置的動撓度呈現(xiàn)出總體增加的趨勢,在某些速度上存在撓度減小的情況,當車速達到 340 km/h時,豎向動撓度達到峰值,隨著車速再增加,橋梁產(chǎn)生的豎向撓度會有所下降。實驗結果證明,所采用的 FMCW 毫米波雷達是一個高精度的橋梁振動監(jiān)測雷達,能夠準確監(jiān)測橋梁的復雜振動,其便攜、高精度的優(yōu)勢為我國高鐵橋梁健康監(jiān)測提供了新的方法。
引 言
我國高速鐵路建設的重要特點是橋梁在高速鐵路線路中總占比高,橋梁的性能監(jiān)測對列車運營的安全性和舒適性至關重要[1]。而橋梁安全監(jiān)測的內容廣泛,撓度監(jiān)測作為高速鐵路橋梁安全監(jiān)測的重要內容,直接反映了橋梁的整體剛度。準確測量不同車速經(jīng)過時橋梁的動態(tài)撓度值,可以作為橋梁檢定,評價橋梁運營狀態(tài)的關鍵指標。目前傳統(tǒng)的高速鐵路橋梁的動態(tài)撓度監(jiān)測方法大多是依靠鋪設傾角儀、位移計以及架設全站儀、GPS 等儀器實現(xiàn)。這些接觸式測量方法雖然技術成熟,但對于高架的高鐵橋梁存在著安裝困難、不易固定,并且操作復雜、成本高、工作效率低等問題[2];而非接觸式現(xiàn)代地基雷達系統(tǒng)測量的方法能夠避免這些問題,具有較高的研究意義。
目前,在橋梁監(jiān)測方面國外已經(jīng)發(fā)展了較成熟的地基雷達測量系統(tǒng),如 IBIS?S、FastGBSAR。研究人員基于國外此類系統(tǒng)驗證了地基雷達在橋梁撓度監(jiān)測的精度[3]。如 文 獻 [4]利 用 FastGBSAR 監(jiān) 測 了 動 車 組 時 速300 km/h以上,載客運行狀態(tài)下單雙線通過京滬高鐵32 m橋梁時梁體跨中位置豎向撓度,其驗證了 FastGBSAR 統(tǒng)計測量的 32 m 橋梁跨中動撓度結果與傳統(tǒng)方法檢定的結果相吻合;文獻[5]利用 IBIS?S 型地基雷達對某長江鐵路大橋進行了短時間序列的動態(tài)撓度監(jiān)測,分析了影響撓度數(shù)據(jù)質量的因素,并得出其測量的真實環(huán)境下地基雷達橋梁精度[4]為 0.27 mm。上述研究一方面采用的是國外設備,另一方面其監(jiān)測都是針對某一個速度級,沒有在不同速度級下對橋梁撓度進行監(jiān)測。本文利用中國科學院國家空間科學中心研制的基于調頻連續(xù)波(Frequency Modulation Continuous Wave,F(xiàn)MCW)體制的地基雷達系統(tǒng),在鹽通高速鐵路運行檢測期間,對不同車速下的橋梁動撓度進行了監(jiān)測,統(tǒng)計了列車在不同速度級下 24 m 簡支梁跨中位置的豎向動撓度,解決了在不同速度級下的橋梁動態(tài)撓度監(jiān)測的工程問題,也為國內研制的地基雷達系統(tǒng)在橋梁監(jiān)測等方面的應用推廣奠定了基礎。
1 基本原理
1.1 橋梁振動監(jiān)測原理
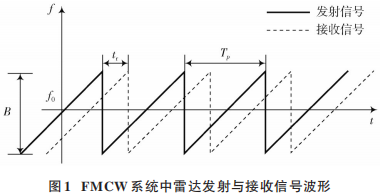
FMCW 系統(tǒng)發(fā)射信號為線性調頻連續(xù)波信號,雷達的發(fā)射信號波形與目標返回的回波信號波形如圖 1 所示。發(fā)射與接收信號之間存在一個時間延遲 tr = 2R c,R為雷達與目標之間的距離,c為電磁波的傳播速度。
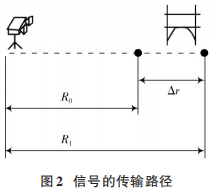
信號的傳輸路徑如圖 2所示,B 為掃頻帶寬,雷達發(fā)射電磁波并接收目標的回波信號,當目標由距雷達 R0的位置移動到距雷達 R1 的位置,則根據(jù)目標在不同時刻的雷達回波之間的相位信息可以求得目標的位置變化 Δr。t時刻,雷達發(fā)射信號為:

式中:A0 為雷達發(fā)射信號的幅度;f0 為中心頻率;Tp 為掃頻周期;k為發(fā)射線性調頻信號的調頻斜率。
在某時刻,距離雷達 Rt 處的點目標回波信號表達式為:
式中:rect()為矩形函數(shù);A 為雷達接收信號的幅度。此時,回波信號的相位為:

式(3)最后一項為非線性殘余相位,其引起的是不同距離上的回波信號在時間上的超前與滯后,可以通過“去斜”處理消除。當 Rt不同時,目標的距離差與兩次回波的相位差之間的關系為:

式中:ΔR 為橋梁在雷達視線上的位置變化;Δφ 為不同回波信號產(chǎn)生的相位變化;λ 為雷達發(fā)射信號在其中心頻率 f0 處對應的波長。由式(4)可以看出,雷達監(jiān)測目標形變的能力與電磁波的波長與相位差的測量精度有關。根據(jù)雷達在橋梁下的具體擺放位置以及觀測角度,通過測得的雷達視線上的距離差 ΔR可得到列車經(jīng)過橋梁時橋梁產(chǎn)生的豎向動撓度,由實測動撓度可以計算得出所測橋梁的撓跨比、動力系數(shù)[6?7]等參數(shù),通過與仿真的理論數(shù)值相對比,可以給高速鐵路豎向荷載設計反饋重要的參數(shù)信息。
1.2 FMCW 雷達系統(tǒng)
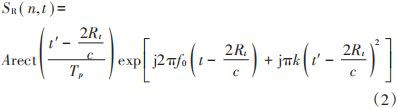
監(jiān)測橋梁撓度變化所使用的 FMCW 雷達系統(tǒng),其主要由天線、射頻模塊、數(shù)據(jù)采樣及處理模塊和頻率綜合器構成[8],雷達系統(tǒng)框圖如圖 3 所示,該雷達系統(tǒng)體積小,具有小型、便于攜帶的優(yōu)勢。系統(tǒng)采用了 Ka 波段,表 1列出了雷達的具體參數(shù)。
此系統(tǒng)采用的雷達信號是 Ka 波段下的線性調頻連續(xù)信號,其發(fā)射信號與接收信號同時進行。為增加收發(fā)鏈路間的隔離度,系統(tǒng)發(fā)射、接收信號分別采用獨立的天線。天線的形式采用波導縫隙陣,其波束較窄、效率高,增益為 30 dB,兩個天線間的隔離度能夠達到 60 dB以上。射頻模塊包括發(fā)射鏈路與接收鏈路兩部分,數(shù)據(jù)采樣處理模塊提供了數(shù)據(jù)的采集存儲功能,頻率綜合模塊為系統(tǒng)生成穩(wěn)定可靠的頻率源。
該系統(tǒng)還具有全天時、全天候、連續(xù)監(jiān)測等優(yōu)點,并且具有高精度形變的檢測能力,其精度可以達到毫米級。
2 橋梁撓度監(jiān)測實驗
2.1 實驗條件
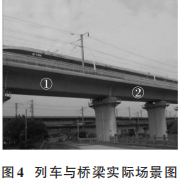
根 據(jù) 鹽 通 高 鐵 聯(lián) 調 聯(lián) 試 及 動 態(tài) 監(jiān) 測 方 案 ,在CRH380AJ?0203 綜合檢測列車上下行線的逐級提速過程中,對不同車速條件下的橋梁進行豎向動撓度監(jiān)測。CRH380AJ是極限時速可達 400多千米的高速綜合檢測列車,以 CRH380AJ 型電力動車組為基礎,為 8 節(jié)編組。車身總長度大約 203 m,子車廂長度約為 25 m。檢測列車從鹽城到南通進行上下行線往返實驗。鹽通高鐵線架設的橋梁多以 24 m,32 m 簡支梁為主,其軌道形式為無砟軌道,實驗地點選擇在海安站?如皋南站線測點橋梁(橋墩編號 1261~1262 之間),圖 4 為列車與橋梁實際場景圖,圖中 1 號位置橋梁為 32 m 簡支梁,2 號位置為24 m 簡支梁。本文從跨度應用廣泛的 24 m 簡支梁入手,統(tǒng)計車速從 180 km/h 逐級提升到 360 km/h 過程中不同速度級下的橋梁豎向動撓度的變化情況。
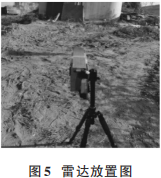
除上述的 FMCW 收發(fā)一體雷達外,完整的橋梁監(jiān)測系統(tǒng)還包括:電源、三角支架、數(shù)據(jù)處理工作站等。圖 5 為具體觀測時雷達的實際放置狀態(tài),在進行橋梁撓度監(jiān)測時,將雷達安裝于三腳架上,并將三腳架固定在某一簡支梁梁體跨中位置正下方地面上,雷達天線垂直向上觀測梁體跨中位置。當列車高速通過橋梁時,保證雷達能精確測量出在輪軌沖擊下橋梁的豎向形變信息。
2.2 實驗結果與分析
實驗采集了各個速度級橋梁跨中撓度的時域波形變化數(shù)據(jù)并進行了實時處理。圖 6 為 24 m 簡支梁不同運行車速下梁體跨中豎向動撓度時程曲線。圖中顯示了列車在 12 s內經(jīng)過橋梁前后時橋梁的撓度變化。
可以清晰地看出列車在不同的車速下跨中位置梁體豎向撓度隨時間的變化,車速分別為180 km/h,220 km/h,260 km/ h,300 km/ h,310 km/ h,330 km/ h,340 km/ h,350 km/h,360 km/h。當橋梁上沒有列車通過的情況下,橋梁是靜態(tài)的。當列車高速行駛通過時,橋梁狀態(tài)發(fā)生變化,可以看出,高速行駛的列車在 5~9 s時間段內撞擊鐵路產(chǎn)生強烈的振動。伴隨車輛離開,橋梁仍有短暫的余振,之后橋梁撓度再次恢復到靜態(tài)狀態(tài)。從以上9 個不同車速的圖形比較來看,列車通過時產(chǎn)生振動的周期與實際列車車廂編組相符合,這說明在規(guī)則排列的列車軸重荷載作用下,橋梁出現(xiàn)有規(guī)律的振動,可以看出它們反映了相同的車橋振動響應特性。
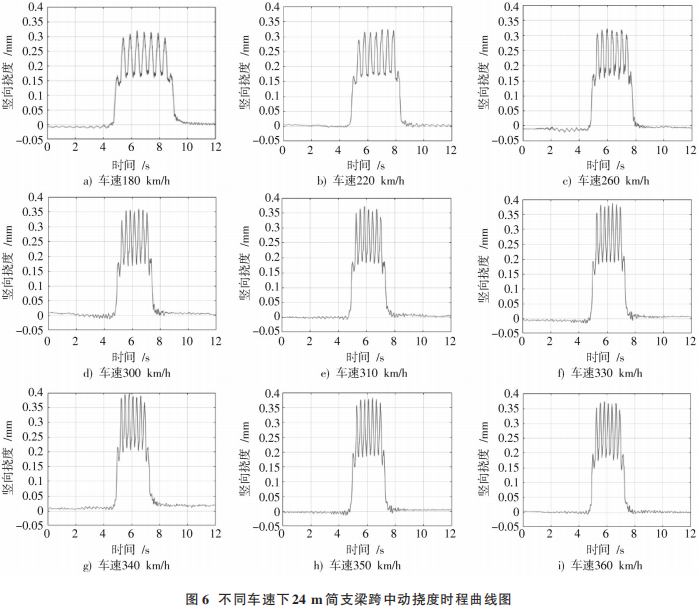
表 2 列出了不同車速下豎向動撓度峰值,其隨速度變化分布見圖 7。
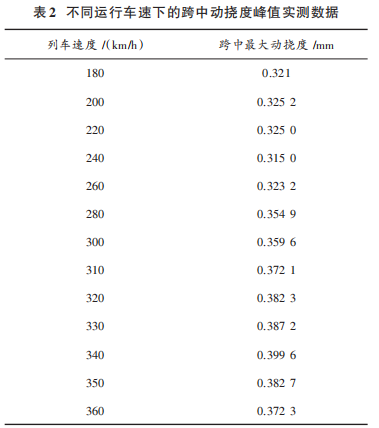
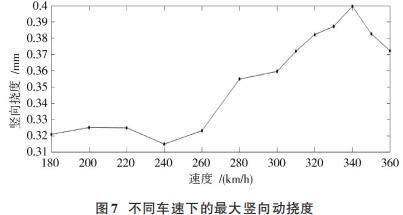
從圖 7 中可以看出:車速在 180~220 km/h 范圍內,梁體跨中位置的豎向撓度變化不是十分明顯,呈現(xiàn)出緩慢上升的趨勢;當列車速度達到 240 km/h,撓度有所下降,隨著列車繼續(xù)提速,在車速為 240~340 km/h 時,可以明顯看出梁體跨中位置的豎向動撓度呈現(xiàn)出增加的趨勢,說明在此速度區(qū)間內,橋梁的動撓度峰值受車速影響較大;當車速達到 340 km/h 時,達到最大動撓度,隨著車速繼續(xù)增加,梁體跨中位置的豎向動撓度呈現(xiàn)下降的趨勢。在 180~360 km/h 的車速范圍內,測得的最大動撓度為 0.40 mm,其對應的撓跨比結果遠小于我國《高速鐵路橋梁運營性能檢定規(guī)定》中橋梁撓跨比的規(guī)范限值[7]。本文的實測數(shù)據(jù)與文獻[9]在高速列車?橋梁系統(tǒng)豎向共振影響因素分析的研究中對 CRH3 高速列車通過24 m橋梁時的跨中振動位移仿真結果基本一致,其在車速300 km/h時跨中振動位移的仿真結果為0.42 mm。在本文實測數(shù)據(jù)中,當列車以 300 km/h 的速度通過時,橋梁跨中豎向撓度為 0.36 mm,實測值較理論值稍小。
從車輛動力學的角度分析,列車的車輛振動和橋梁結構的振動相互作用,形成一個復雜的多自由度振動系統(tǒng)[10]。在此系統(tǒng)中,機車的運動速度、機車運動時產(chǎn)生的周期性沖擊、線路不平順是影響車輛通過橋梁時產(chǎn)生豎向振動的主要因素[11]。正由于車輛在運行過程中會產(chǎn)生復雜的振動,真實地模擬出列車通過橋梁時橋梁產(chǎn)生的撓度是相當復雜和困難的。文獻[12]在橋梁列車的耦合振動試驗中得出簡支梁最大動撓度均遠小于豎向撓跨比限值,橋梁豎向動撓度隨車速的增加而增大。而從本次實測數(shù)據(jù)中可以看出,橋梁跨中位置的豎向動撓度不是隨速度的增大而單調的增加,而是在撓度起伏的過程中逐漸增大,從簡支梁在移動載荷作用下的振動響應理論分析來看,速度對于橋梁撓度的影響是一個相對復雜的過程。在一定的速度下,移動恒定載荷通過橋梁時,列車與橋梁存在著共振與消振問題。在簡支梁橋豎向振動響應中有研究也指出車輛通過簡支梁橋時,會在某些速度下發(fā)生共振,一般速度低時共振響應小,速度高時共振響應大。文獻[13]在簡支梁共振與消振機理研究中也指出共振現(xiàn)象放大橋梁響應,消振發(fā)生時橋梁的振動響應較小。
參照以上結果的對比分析可以得出,車橋系統(tǒng)分析模型和計算機仿真方法可以較好地模擬列車高速通過時橋梁的撓度變化。本文通過實測數(shù)據(jù)分析既驗證了理論模型的有效性,也得出鹽通鐵路 24 m 跨度簡支梁在高速列車運行下的動撓度指標與整體剛度良好,可以保證軌道上的行車穩(wěn)定性和乘坐舒適性。
3 結 語
本文利用國內研制的 FMCW 體制地基雷達對鹽通鐵路上 24 m 簡支梁進行了不同車速運行時的豎向動撓度監(jiān)測。實驗結果表明,基于該體制雷達高精度、高頻率的優(yōu)勢,其能夠準確測量不同車速沖擊下橋梁跨中豎向動撓度變化,相對于傳統(tǒng)的高鐵簡支梁撓度監(jiān)測,提供了一種高效靈活的測量方式,結果顯示測量的精度可以達到毫米級,本次實驗也推廣了國內自主研制的FMCW 地基雷達設備在橋梁監(jiān)測方面的應用。
-
數(shù)據(jù)
+關注
關注
8文章
7257瀏覽量
91943 -
系統(tǒng)測量
+關注
關注
0文章
3瀏覽量
7200 -
毫米波雷達
+關注
關注
107文章
1103瀏覽量
65400
原文標題:論文速覽 | FMCW 毫米波雷達在高鐵橋梁動撓度監(jiān)測的應用
文章出處:【微信號:現(xiàn)代電子技術,微信公眾號:現(xiàn)代電子技術】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
一個示例說明FMCW雷達信號設計的基本原則
24GHz微波雷達FMCW測距系統(tǒng)設計概述
24G微波雷達在不同行業(yè)的應用案例介紹以及CW/FMCW模式的參考電路資料
橋梁結構健康監(jiān)測系統(tǒng)ABC-監(jiān)測哪些參數(shù)?
使用毫米波雷達進行生命體征監(jiān)測

多載頻FMCW在MIMO雷達中的應用研究
FMCW雷達系統(tǒng)及其前端數(shù)據(jù)采集模塊設計

FMCW微波物位計的原理
FMCW激光雷達在自動駕駛上的前景
振弦采集儀在地基沉降監(jiān)測中的應用研究






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論