") 基于結(jié)構(gòu)光的高精度開源三維重建系統(tǒng)
基于結(jié)構(gòu)光的高精度開源三維重建系統(tǒng)

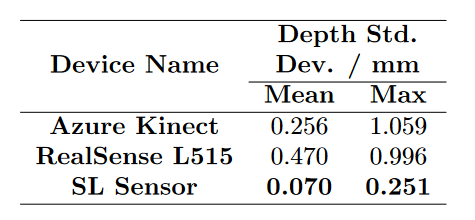
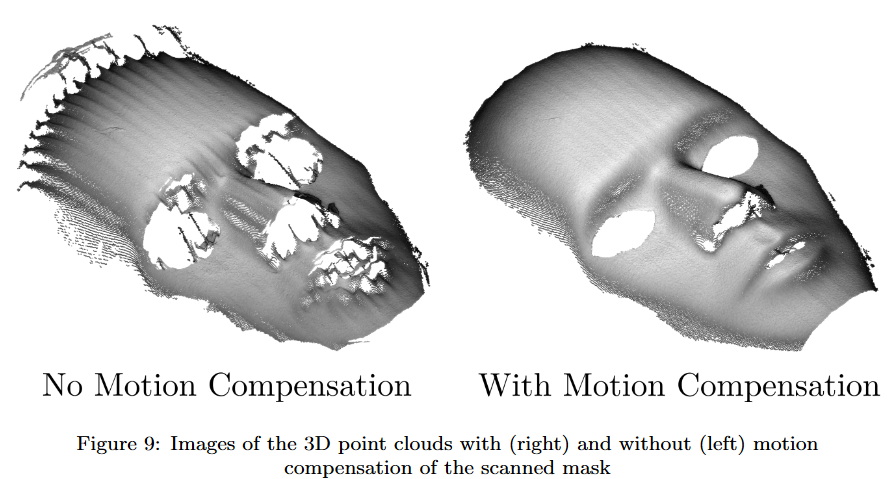
許多面向建筑領(lǐng)域的機(jī)器人作業(yè)都需要獲得高精度的三維表面信息以完成類似于自動(dòng)水泥拋光匯總石膏噴涂等作業(yè)。然而,目前在市場(chǎng)上消費(fèi)級(jí)深度相機(jī)并不能滿足其毫米級(jí)的精度要求。本文中提出了一個(gè)基于結(jié)構(gòu)光的解決方案SL sensor,能夠達(dá)到5hz的發(fā)布頻率的同時(shí)生成高保真的點(diǎn)云(基于PSP方法)。通過與其他深度相機(jī)的實(shí)驗(yàn)-Azure Kinetic和RealSencse L515,驗(yàn)證了其在精度和準(zhǔn)確度方面均有較好的優(yōu)勢(shì)。為了使SL Sensor成為機(jī)器人應(yīng)用實(shí)驗(yàn)平臺(tái),我們?yōu)槠涮砑恿艘粋€(gè)運(yùn)動(dòng)補(bǔ)償機(jī)制使得其能夠在線性運(yùn)動(dòng)期間也能夠正常工作(傳統(tǒng)PSP方法僅在靜態(tài)環(huán)境下能夠使用)。通過場(chǎng)景實(shí)驗(yàn)表明SL Sensor 能夠重建出高精度的石灰噴涂表面。
系統(tǒng)介紹
(一)硬件系統(tǒng)
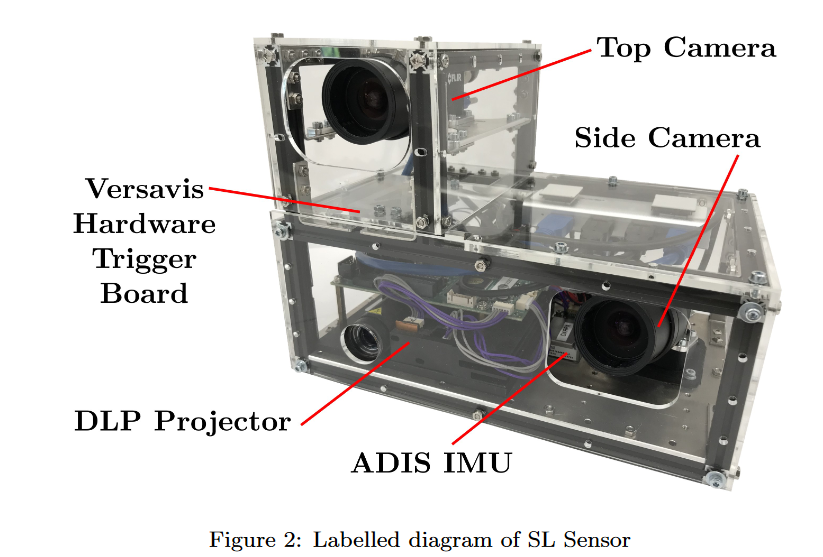
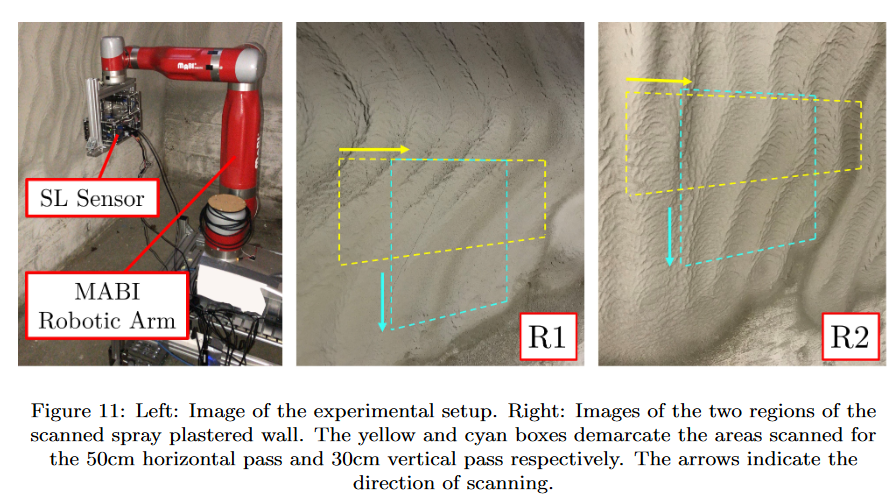
硬件系統(tǒng)結(jié)構(gòu) 硬件系統(tǒng)包含兩個(gè)工業(yè)CMOS彩色攝像頭(1440×1080)和一個(gè)DLP投影儀(912×1140)。攝像機(jī)和投影儀是由Versavis板完成觸發(fā)與時(shí)間同步。另外額外的IMU為未來的運(yùn)動(dòng)補(bǔ)償策略做準(zhǔn)備。其測(cè)量范圍為設(shè)備前方0.3-1.0m的區(qū)域。
(二)軟件系統(tǒng)
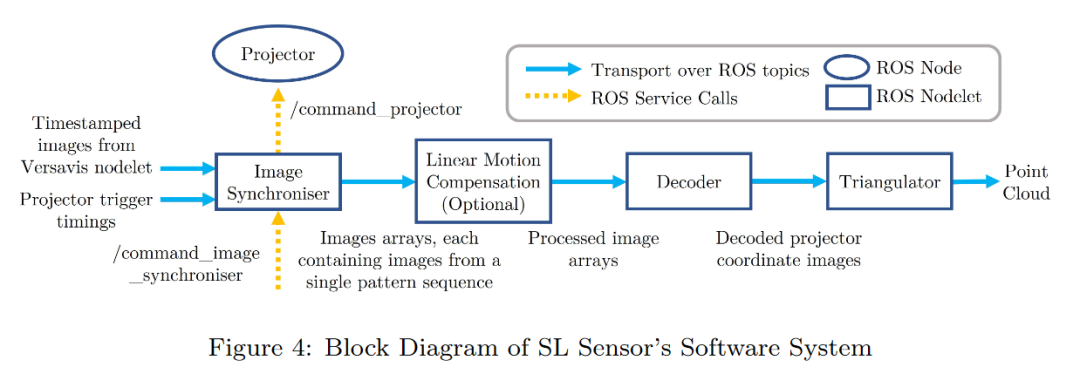
軟件系統(tǒng)結(jié)構(gòu) 軟件系統(tǒng)在機(jī)器人操作系統(tǒng)(ROS)的框架規(guī)范下編寫,這確保了它可以輕松地與其他ROS社區(qū)的功能組件完成交互與集成。 整個(gè)三維重建流程分為四個(gè)節(jié)點(diǎn),其在較有效率的零拷貝指針來傳遞進(jìn)程之間的圖像的同時(shí)保證了各個(gè)部分的模塊性。部分Decoder與Triangular節(jié)點(diǎn)繼承了SLStudio中的代碼。
分析評(píng)估
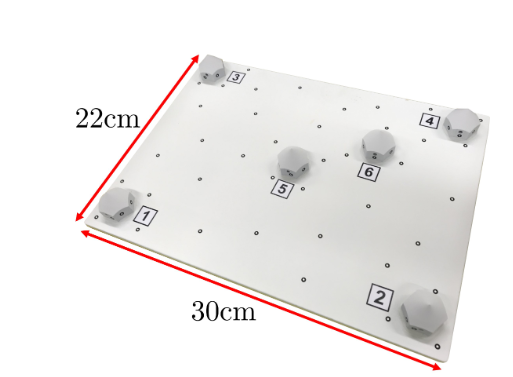
(一)靜態(tài)精度測(cè)試


(二)運(yùn)動(dòng)滑軌實(shí)驗(yàn)
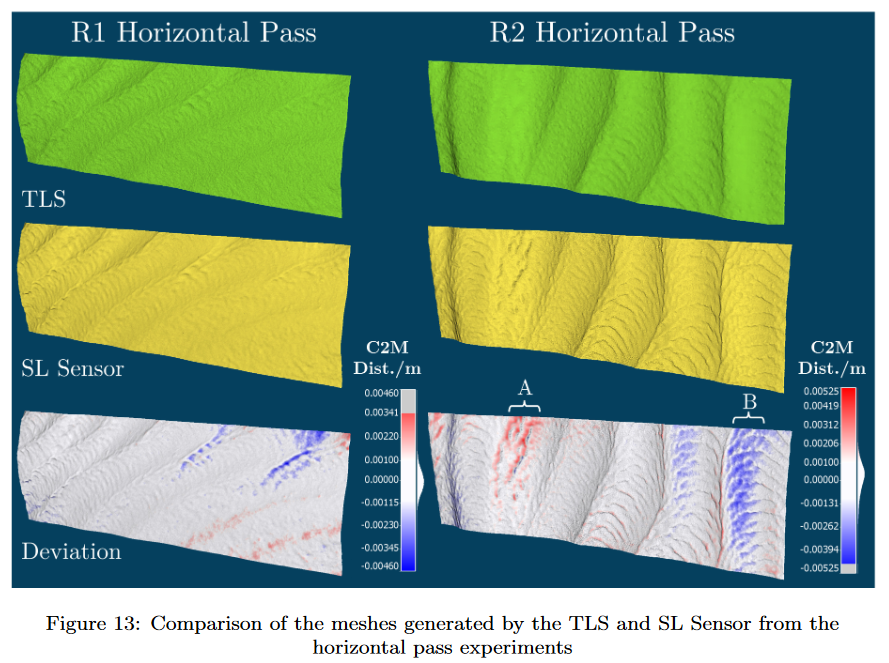
(三)噴涂場(chǎng)景實(shí)驗(yàn)


總結(jié)
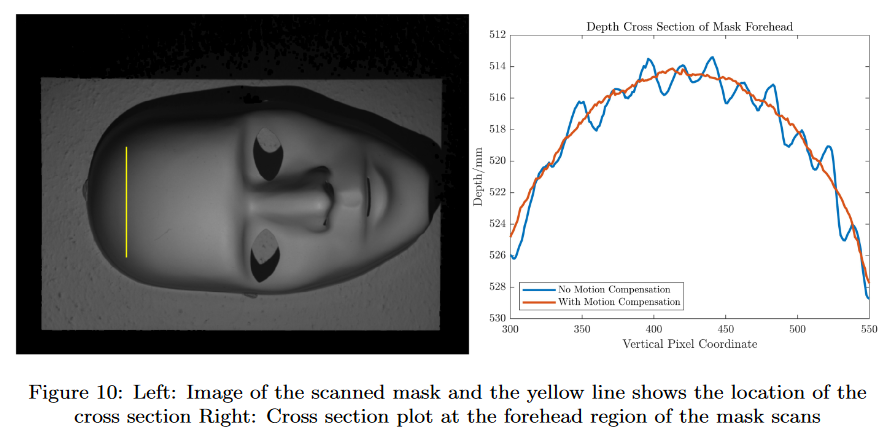
在這項(xiàng)工作中,我們提出了一種結(jié)構(gòu)光三維重建解決方案。與現(xiàn)有傳感器解決方案相比,我們的SL Sensor集成了ROS中間件框架上的現(xiàn)有機(jī)器人軟件,以定制化實(shí)現(xiàn)3D掃描。我們分別介紹了了軟件架構(gòu)、硬件設(shè)置和校準(zhǔn)程序,并驗(yàn)證傳感器達(dá)到毫米級(jí)精度。我們將其與常用的傳感器進(jìn)行了比較,實(shí)驗(yàn)結(jié)構(gòu)表明我們的傳感器達(dá)到了精細(xì)化施工應(yīng)用的精度要求。之后我們驗(yàn)證了我們的運(yùn)動(dòng)補(bǔ)償策略的有效性-在線性運(yùn)動(dòng)下高精度PSP掃描,并展示了我們的傳感器在真實(shí)環(huán)境運(yùn)動(dòng)下根據(jù)實(shí)際情況進(jìn)行模式切換的能力。未來的工作將擴(kuò)展SL Sensor的掃描能力由線性運(yùn)動(dòng)到任意6自由度運(yùn)動(dòng)。可能的解決方案包括更穩(wěn)健的運(yùn)動(dòng)補(bǔ)償策略或自適應(yīng)模式投影,當(dāng)傳感器處于靜態(tài)并切換到當(dāng)檢測(cè)到運(yùn)動(dòng)時(shí),另一種模式更能適應(yīng)運(yùn)動(dòng)場(chǎng)景。此外,可能研究多方法點(diǎn)云配準(zhǔn)以減少掃描過程中的錯(cuò)誤積累,以獲得更準(zhǔn)確的點(diǎn)云合并結(jié)果。
審核編輯:郭婷
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29748瀏覽量
212887 -
攝像機(jī)
+關(guān)注
關(guān)注
3文章
1705瀏覽量
61409 -
投影儀
+關(guān)注
關(guān)注
4文章
891瀏覽量
44109
原文標(biāo)題:SL-Sensor:基于結(jié)構(gòu)光的高精度開源三維重建系統(tǒng)(arxiv2022)
文章出處:【微信號(hào):3D視覺工坊,微信公眾號(hào):3D視覺工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
航天宏圖全棧式3DGS實(shí)景三維重建系統(tǒng)解決方案

激光三維掃描技術(shù):無噴粉條件下高反光表面三維重建的光學(xué)原理與應(yīng)用
非接觸式激光三維掃描應(yīng)對(duì)鏡面反射表面的無噴粉測(cè)量方案:原理與創(chuàng)新

VirtualLab:光學(xué)系統(tǒng)的三維可視化
奧比中光助力創(chuàng)想三維登頂世界消費(fèi)級(jí)3D掃描儀市場(chǎng)
使用DLP LightCrafter4500投影結(jié)構(gòu)光進(jìn)行三維重建遇到的疑問求解
在結(jié)構(gòu)光三維成像方面DLP LightCrafter 4500如何連續(xù)投射彩色圖?
三維測(cè)量在醫(yī)療領(lǐng)域的應(yīng)用
三維激光測(cè)量系統(tǒng)的優(yōu)勢(shì)
三維測(cè)量技術(shù)在工業(yè)中的應(yīng)用
CASAIM與邁普醫(yī)學(xué)達(dá)成合作,三維掃描技術(shù)助力醫(yī)療輔具實(shí)現(xiàn)高精度三維建模和偏差比對(duì)
建筑物邊緣感知和邊緣融合的多視圖立體三維重建方法

留形科技借助NVIDIA平臺(tái)提供高效精確的三維重建解決方案
基于大模型的仿真系統(tǒng)研究一——三維重建大模型

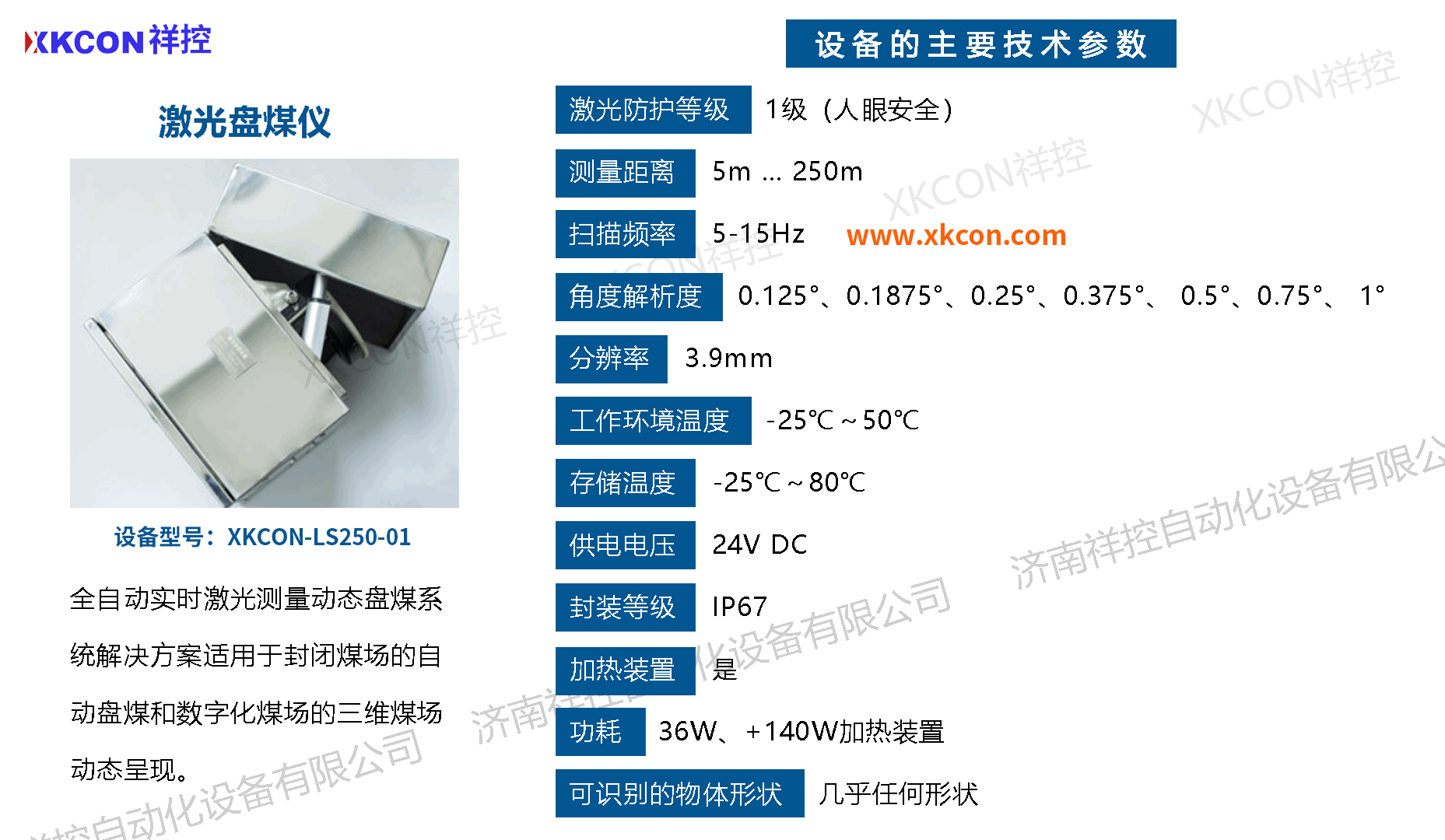
基于三維激光掃描技術(shù)的XKCON祥控激光盤煤儀可高精度、快速、全覆蓋盤煤,相對(duì)精度優(yōu)于0.5‰





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論