 如何在Linux系統下自動創建設備節點
如何在Linux系統下自動創建設備節點
第一:自動創建設備節點方法
1、使用 class_create 函數創建一個類。
2、使用 device_create 函數在我們創建的類下面創建一個設備。
第二:自動創建設備節點簡介
Linux驅動實驗中,通過使用insmod命令加載模塊后,需要通過mknod命令手動創建設備節點,這樣使用起來比較麻煩,并且不可能每個設備都這樣操作, Linux 系統的存在就是為了方便使用, 所以我們來看一下如何實現自動創建設備節點, 當加載模塊時, 在/dev 目錄下自動創建相應的設備文件。怎么自動創建一個設備節點呢?在嵌入式 Linux 中使用 mdev 來實現設備節點文件的自動創建和刪除。
udev 是一種工具, 它能夠根據系統中的硬件設備的狀態動態更新設備文件, 包括設備文件的創建, 刪除等。設備文件通常放在/dev 目錄下。使用 udev 后, 在/dev 目錄下就只包含系統中真正存在的設備。而mdev 是 udev 的簡化版本,是 busybox 中所帶的程序,最適合用在嵌入式系統,而 udev 一般用在 PC 上的linux 中,相對 mdev 來說要復雜些, 所以在嵌入式 Linux 中使用 mdev 來實現設備節點文件的自動創建和刪除。
第三:創建和刪除類函數
內核中定義了struct class結構體,一個struct class結構體類型變量對應一個類,內核同時提供了class_create用來創建一個類,這個類存放于 sysfs 下面, 一旦創建好了這個類, 再調用 device_create來在/dev 目錄下創建相應的設備節點。這樣, 加載模塊的時候, 用戶空間中的 udev 會自動響應 device_create,去/sysfs 下尋找對應的類從而創建設備節點。
在 Linux 驅動程序中一般通過 class_create 和 class_destroy 來完成設備節點的創建和刪除。首先要創建一個 class 類結構體, class 結構體定義在 include/linux/device.h 里面。class_create 是個宏, 宏定義如下:#define class_create(owner, name)
({
static struct lock_class_key __key;
__class_create(owner, name, &__key);
})
struct class *__class_create(struct module *owner, const char *name,struct lock_class_key *key)
class_create一共有兩個參數,參數owner 一般為 THIS_MODULE, 參數 name 是類名字。返回值是個指向結構體 class 的指針, 也就是創建的類。
void class_destroy(struct class *cls);//參數 cls 就是要刪除的類。
當使用上節的函數創建完成一個類后,使用device_create 函數在這個類下創建一個設備。
struct device *device_create(struct class *class,
struct device *parent,
dev_t devt,
void *drvdata,
const char *fmt, ...)
device_create是個可變參數函數,參數class就是設備要創建哪個類下面;參數parent是父設備,一般為NULL,也就是沒有父設備;參數devt是設備號;參數drvdata是設備可能會使用的一些數據,一般為NULL;參數fmt是設備名字,如果設置fmt=xxx的話,就會生成/dev/xxx這個設備文件。返回值就是創建好的設備。同樣的, 卸載驅動的時候需要刪除掉創建的設備, 設備刪除函數為 device_destroy, 函數原型如下:
void device_destroy(struct class *class, dev_t devt)
第五:創建類函數
chrdev.c文件完整代碼如下所示:
//包含了 cdev 結構及相關函數的定義。
static int major_num, minor_num; //定義主設備號和次設備號
struct class *class; //定義類
struct cdev cdev;//定義一個 cdev 結構體
module_param(major_num, int, S_IRUSR); //驅動模塊傳入普通參數 major_num
module_param(minor_num, int, S_IRUSR); //驅動模塊傳入普通參數 minor_num
dev_t dev_num;
int chrdev_open(struct inode *inode, struct file *file)
{
printk("chrdev_open
");
return 0;
}
struct file_operations chrdev_ops = {
.owner = THIS_MODULE,
.open = chrdev_open
};
static int hello_init(void)
{
int ret; //函數返回值
if (major_num)
{
/*靜態注冊設備號*/
printk("major_num = %d
", major_num); //打印傳入進來的主設備號
printk("minor_num = %d
", minor_num); //打印傳入進來的次設備號
//MKDEV 將主設備號和次設備號合并為一個設備號
dev_num = MKDEV(major_num, minor_num);
ret = register_chrdev_region(dev_num, DEVICE_NUMBER, DEVICE_SNAME); //注冊設備號
if (ret < 0)
{
printk("register_chrdev_region error
");
}
printk("register_chrdev_region ok
"); //靜態注冊設備號成功
}
else
{
/*動態注冊設備號*/
ret = alloc_chrdev_region(&dev_num, DEVICE_MINOR_NUMBER, 1, DEVICE_ANAME);
if (ret < 0)
{
printk("alloc_chrdev_region error
");
}
printk("alloc_chrdev_region ok
"); //動態注冊設備號成功
major_num = MAJOR(dev_num); //將主設備號取出來
minor_num = MINOR(dev_num); //將次設備號取出來
printk("major_num = %d
", major_num); //打印傳入進來的主設備號
printk("minor_num = %d
", minor_num); //打印傳入進來的次設備號
}
cdev.owner = THIS_MODULE;
//cdev_init 函數初始化 cdev 結構體成員變量
cdev_init(&cdev, &chrdev_ops);
//完成字符設備注冊到內核
cdev_add(&cdev, dev_num, DEVICE_NUMBER);
//創建類
class = class_create(THIS_MODULE, DEVICE_CLASS_NAME);
return 0;
}
static void hello_exit(void)
{
unregister_chrdev_region(MKDEV(major_num, minor_num), DEVICE_NUMBER);
//注銷設備號
cdev_del(&cdev);
//刪除類
class_destroy(class);
printk("gooodbye!
");
}
module_init(hello_init);
module_exit(hello_exit);
MODULE_LICENSE("GPL");
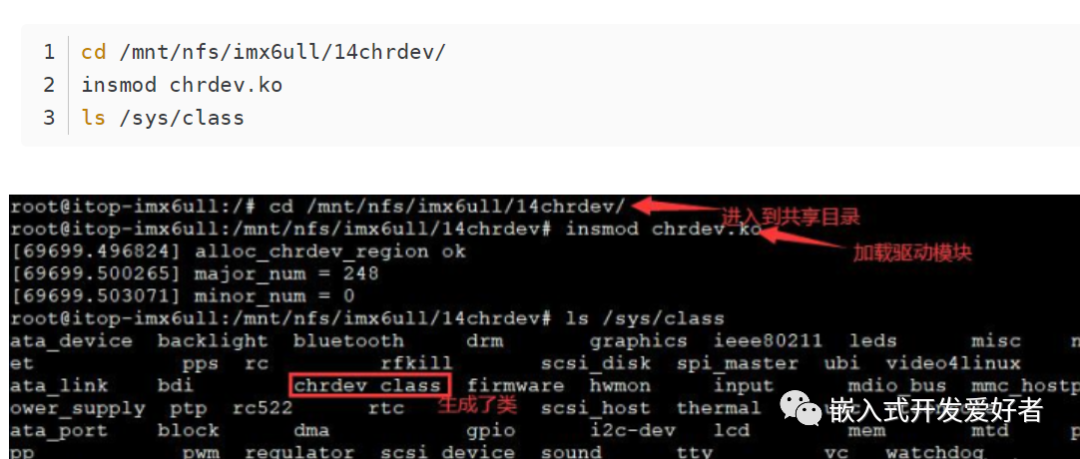
將代碼編譯成模塊,利用驅動程序里面的Makefile文件。
編譯并加載,如果創建類成功以后,會在開發板的/sys/class/下面生成一個名為“chrdev_class”的類。現在沒有加載驅動的情況,如下圖所示:ls /sys/class
第六:創建設備函數
在前面代碼的基礎上添加創建設備的代碼,如下所示:
//包含了 cdev 結構及相關函數的定義。
static int major_num, minor_num; //定義主設備號和次設備號
struct class *class; /* 類 */
struct device *device; /* 設備 */
struct cdev cdev; //定義一個 cdev 結構體
module_param(major_num, int, S_IRUSR); //驅動模塊傳入普通參數 major_num
module_param(minor_num, int, S_IRUSR); //驅動模塊傳入普通參數 minor_num
dev_t dev_num; /* 設備號 */
/***
* @description: 打開設備
* @param {structinode} *inode:傳遞給驅動的 inode
* @param {structfile} *file:設備文件, file 結構體有個叫做 private_data 的成員變量,
* 一般在 open 的時候將 private_data 指向設備結構體。
* @return: 0 成功;其他 失敗
*/
int chrdev_open(struct inode *inode, struct file *file)
{
printk("chrdev_open
");
return 0;
}
// 設備操作函數結構體
struct file_operations chrdev_ops = {
.owner = THIS_MODULE,
.open = chrdev_open
};
/**
* @description: 驅動入口函數
* @param {*}無
* @return {*} 0 成功;其他 失敗
*/
static int hello_init(void)
{
int ret; //函數返回值
if (major_num)
{
/*靜態注冊設備號*/
printk("major_num = %d
", major_num); //打印傳入進來的主設備號
printk("minor_num = %d
", minor_num); //打印傳入進來的次設備號
dev_num = MKDEV(major_num, minor_num);
//MKDEV 將主設備號和次設備號合并為一個設備號
ret = register_chrdev_region(dev_num, DEVICE_NUMBER, DEVICE_SNAME); //注冊設備號
if (ret < 0)
{
printk("register_chrdev_region error
");
}
printk("register_chrdev_region ok
"); //靜態注冊設備號成功
}
else
{
/*動態注冊設備號*/
ret = alloc_chrdev_region(&dev_num, DEVICE_MINOR_NUMBER, 1, DEVICE_ANAME);
if (ret < 0)
{
printk("alloc_chrdev_region error
");
}
printk("alloc_chrdev_region ok
"); //動態注冊設備號成功
major_num = MAJOR(dev_num); //將主設備號取出來
minor_num = MINOR(dev_num); //將次設備號取出來
printk("major_num = %d
", major_num); //打印傳入進來的主設備號
printk("minor_num = %d
", minor_num); //打印傳入進來的次設備號
}
// 初始化 cdev
cdev.owner = THIS_MODULE;
cdev_init(&cdev, &chrdev_ops);
// 向系統注冊設備
cdev_add(&cdev, dev_num, DEVICE_NUMBER);
// 創建 class 類
class = class_create(THIS_MODULE, DEVICE_CLASS_NAME);
// 在 class 類下創建設備
device = device_create(class, NULL, dev_num, NULL, DEVICE_NODE_NAME);
return 0;
}
/**
* @description: 驅動出口函數
* @param {*}無
* @return {*}無
*/
static void hello_exit(void)
{
//注銷設備號
unregister_chrdev_region(MKDEV(major_num, minor_num), DEVICE_NUMBER);
//刪除設備
cdev_del(&cdev);
//注銷設備
device_destroy(class, dev_num);
//刪除類
class_destroy(class);
printk("gooodbye!
");
}
// 將上面兩個函數指定為驅動的入口和出口函數
module_init(hello_init);
module_exit(hello_exit);
// LICENSE 和作者信息
MODULE_LICENSE("GPL");
MODULE_AUTHOR("zuomu");
編寫應用測試程序如下所示:
int main(int argc,char *argv[])
{
int fd;
char buf[64] = {0};
fd = open("/dev/chrdev_test",O_RDWR); //打開設備節點
if(fd < 0)
{
perror("open error
");
return fd;
}
close(fd);
return 0;
}
輸入命令編譯app.c ,利用驅動里面的Makefile文件實現。
第七:具體效果如下:
將前面加載的驅動卸載掉,再加載新編譯好的的驅動, 如下圖所示:
rmmod chrdev
insmod chrdev.ko

輸入以下命令查看/sys/class 下面是否生成類, 如下圖所示:ls /sys/class/chrdev_class/
輸入以下命令查看下是否生成了設備節點ls /dev/chrdev_test

總結:利用標準字符驅動模型,自動生成設備節點,在開發過程具有重要意義。
審核編輯:郭婷
-
嵌入式
+關注
關注
5143文章
19575瀏覽量
315705 -
Linux
+關注
關注
87文章
11479瀏覽量
213030
原文標題:Linux系統下自動創建設備節點方法
文章出處:【微信號:嵌入式開發愛好者,微信公眾號:嵌入式開發愛好者】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
數據采集的關鍵節點設備是什么

如何在Android設備上安裝Cyusb3014芯片驅動?
如何在RakSmart服務器上用Linux系統部署DeepSeek
Linux中的用戶與創建

如何在Linux系統上設置站群服務器IP地址
如何在TMS320C6727 DSP上創建基于延遲的音頻效果

Linux操作系統運行參數自動調整技術





 工商網監
工商網監
評論