") 港口自動(dòng)駕駛,是偽自動(dòng)駕駛商用場(chǎng)景嗎?
港口自動(dòng)駕駛,是偽自動(dòng)駕駛商用場(chǎng)景嗎?

自動(dòng)駕駛圈內(nèi)的朋友,前段時(shí)間可能見(jiàn)證了一場(chǎng)精彩絕倫的圍繞“礦山是不是偽自動(dòng)駕駛商用場(chǎng)景”的隔空喊話。先有《礦山無(wú)人駕駛,國(guó)內(nèi)首個(gè)被證偽的自動(dòng)駕駛商用場(chǎng)景》直抒胸臆,后有《礦山自動(dòng)駕駛的第一性原理》針?shù)h相對(duì),兩位資深人士站在各自的專(zhuān)業(yè)角度將礦山場(chǎng)景扒了個(gè)精光,讓人看得拍手稱(chēng)快。
單從這兩篇文章,作為礦山的門(mén)外漢,我依舊無(wú)法得出礦山是不是偽自動(dòng)駕駛商用場(chǎng)景的結(jié)論。但是這場(chǎng)隔空喊話卻勾起了我的另一個(gè)相似的疑問(wèn),作為常常和礦山相提并論的好兄弟——我稍微熟悉的港口場(chǎng)景,她是偽自動(dòng)駕駛商用場(chǎng)景嗎?”。
趁著對(duì)港口的激情未退,趁著對(duì)碼頭的記憶還在,趁著礦山是否為“假冒偽劣”自動(dòng)駕駛商用場(chǎng)景的熱議還未完全散去,我不妨從幾個(gè)角度來(lái)議一議港口是不是偽自動(dòng)駕駛商用場(chǎng)景,說(shuō)不定將分析過(guò)程和結(jié)論類(lèi)比到礦山,也順帶能將礦山的疑問(wèn)給解答了。
正如《礦山自動(dòng)駕駛的第一性原理》中作者所說(shuō):我可以不贊成你的觀點(diǎn),但是我卻會(huì)捍衛(wèi)你發(fā)表觀點(diǎn)的權(quán)力。業(yè)內(nèi)人士如對(duì)觀點(diǎn)持有不同意見(jiàn),歡迎拿出更專(zhuān)業(yè)的觀點(diǎn)來(lái)反駁。而不是找來(lái)公關(guān)公司,以騙合作為名,騙取個(gè)人信息,要求刪帖。請(qǐng)不要低估和侮辱一個(gè)光著腳小編的勇氣、智商和情商。
一、港口碼頭不是典型的工業(yè)自動(dòng)化場(chǎng)景嗎?港口碼頭中負(fù)責(zé)集裝箱裝卸的三大主力選手:岸橋、AGV、場(chǎng)橋,不是典型的工業(yè)自動(dòng)化產(chǎn)品嗎?2017年開(kāi)港的洋山港四期碼頭,不是國(guó)內(nèi)全自動(dòng)化集裝箱碼頭的代表嗎?
提到港口自動(dòng)駕駛,有上述疑問(wèn)的人不在少數(shù)。這些人對(duì)傳統(tǒng)港口碼頭的自動(dòng)化升級(jí)方案有所了解,但對(duì)2017年之后開(kāi)始的港口碼頭智能化升級(jí),缺少較多關(guān)注。
正菜之前,先來(lái)科普一個(gè)我也曾傻傻分不清的概念:港口和碼頭。港口是集船舶停靠、貨物裝卸、人員辦公和基礎(chǔ)設(shè)施功能于一體的一片區(qū)域。大的港口,還會(huì)分區(qū)來(lái)管理,比如廈門(mén)港下面又分十二個(gè)港區(qū)。碼頭在港口中,主要指負(fù)責(zé)船舶靠泊、貨物裝卸的港口設(shè)施。
針對(duì)集裝箱的裝卸過(guò)程,港口碼頭主要有三種設(shè)備,如圖1所示。第一種是岸橋設(shè)備,在碼頭面進(jìn)行裝卸船;第二種是水平運(yùn)輸設(shè)備,在碼頭面和堆場(chǎng)之間運(yùn)輸;第三種是場(chǎng)橋設(shè)備,在堆場(chǎng)內(nèi)部進(jìn)行裝卸箱。岸橋和場(chǎng)橋設(shè)備屬于典型的港機(jī)設(shè)備,有振華重工這樣的超級(jí)巨頭,其自動(dòng)化、智能化還輪不到我們?nèi)ゲ傩摹?/p>
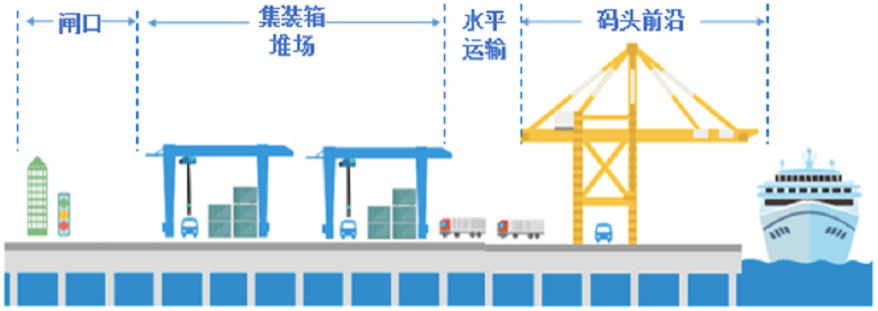
圖1 集裝箱的裝卸過(guò)程(圖片來(lái)源:https://mp.weixin.qq.com/s/lQBPR0ghZqaA12rdAPtgBg)
水平運(yùn)輸設(shè)備在傳統(tǒng)港口碼頭中主要由司機(jī)駕駛的集卡車(chē)負(fù)責(zé),這一塊也是港口碼頭的痛點(diǎn)。港口碼頭運(yùn)營(yíng)方嫌棄司機(jī)難招、工資越來(lái)越高但效率卻沒(méi)有提高。司機(jī)嫌棄港口碼頭開(kāi)車(chē)輪班倒、折返跑、沒(méi)機(jī)會(huì)欣賞沿途風(fēng)景。針對(duì)這個(gè)痛點(diǎn),荷蘭鹿特丹港ETC-Delta碼頭在1993年使用了無(wú)人的自動(dòng)引導(dǎo)運(yùn)輸車(chē)(Automatic Guided Vehicle,AGV)替換有人駕駛集卡車(chē)。
AGV長(zhǎng)得特別像一個(gè)平板車(chē),如圖2所示。在港口碼頭場(chǎng)景中,AGV常采用磁釘導(dǎo)航方式。這種方式需要按照一定的間隔,在行駛道路的地下提前埋上磁釘,如圖3所示。AGV行駛過(guò)程通過(guò)自身的磁導(dǎo)航傳感器接收磁釘信息,從而實(shí)現(xiàn)自身相對(duì)于路徑左右偏差的定位。兩磁釘之間的盲區(qū),AGV通常采用角度傳感器/慣導(dǎo)來(lái)提供航向角度,引導(dǎo)自身正確運(yùn)行在磁釘與磁釘之間。
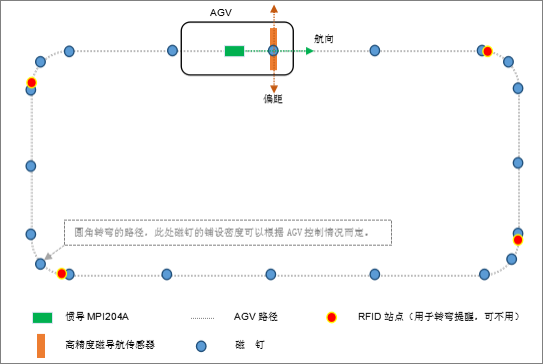
磁釘導(dǎo)航(圖片來(lái)源:http://www.powerlongbattery.cn/2018/65701.html)
經(jīng)過(guò)近三十年的發(fā)展,AGV技術(shù)已經(jīng)達(dá)到了一個(gè)相當(dāng)成熟的階段。無(wú)論是運(yùn)行效率、定位精度,還是運(yùn)行可靠性、穩(wěn)定性等方面,都達(dá)到了一個(gè)優(yōu)秀的工業(yè)自動(dòng)化產(chǎn)品該有的修養(yǎng)。
AGV誕生于歐洲,也在歐洲眾多港口碼頭中得到大面積的推廣和應(yīng)用,繼續(xù)鞏固著歐洲“經(jīng)濟(jì)殖民”時(shí)代的海外貿(mào)易。2017年雙雙建成的青島港前灣四期碼頭(83臺(tái))和洋山港四期碼頭(135臺(tái))均是AGV在國(guó)內(nèi)落地的優(yōu)秀案例。
但是基于AGV的水平運(yùn)輸方案需要在港口碼頭的地面埋下數(shù)萬(wàn)枚磁釘,所以一般適用于港口的新建碼頭,不太適用于港口舊碼頭的自動(dòng)化改造。建成后的港口碼頭隨著使用時(shí)間的增加,磁釘也會(huì)出現(xiàn)老化等各種問(wèn)題,刨坑換磁釘是港口碼頭運(yùn)營(yíng)后期不愿但又不得不面對(duì)的苦難。如果港口碼頭建成后想擴(kuò)建改造,這個(gè)改造代價(jià)也是經(jīng)濟(jì)下行狀態(tài)下的歐洲大部分港口經(jīng)濟(jì)不可承受之重。
以前AGV的痛點(diǎn)可能只能咬牙接受,因?yàn)闆](méi)有更好的解決方案可以替代。但當(dāng)時(shí)間來(lái)到了2015年,部分人稱(chēng)之為自動(dòng)駕駛元年的年份。大學(xué)教授、外企高管紛紛主動(dòng)離開(kāi)自己的舒適圈,投入到浪漫而又無(wú)情的自動(dòng)駕駛創(chuàng)業(yè)中。也是從那一年之后,港口場(chǎng)景被自動(dòng)駕駛技術(shù)盯上,如獵豹看上的兔子,志在必得。
很多人可能想不到,國(guó)內(nèi)最早啟動(dòng)港口自動(dòng)駕駛項(xiàng)目的竟然是上汽。2017年年初,上汽紅巖的自動(dòng)駕駛卡車(chē)項(xiàng)目立項(xiàng)。并于當(dāng)年12月,在上海洋山深水港四期投入14輛“5G+L4”智能重卡,并實(shí)現(xiàn)5車(chē)編隊(duì)行駛。上汽無(wú)論新能源還是自動(dòng)駕駛,細(xì)究起來(lái),起的都很早,但最后貌似都趕了個(gè)晚集。就連專(zhuān)門(mén)負(fù)責(zé)商用車(chē)自動(dòng)駕駛業(yè)務(wù)的友道智途也是2021年11才成立,真是有錢(qián)不怕晚。
針對(duì)港口碼頭水平運(yùn)輸設(shè)備的自動(dòng)駕駛解決方案主要由兩種,一種是無(wú)人集卡,一種是智能引導(dǎo)運(yùn)輸車(chē)(Inteligent Guided Vehicle,IGV)。無(wú)人集卡在普通集裝箱卡車(chē)身上,加裝激光雷達(dá)、相機(jī)、組合導(dǎo)航、計(jì)算單元等自動(dòng)駕駛套件來(lái)實(shí)現(xiàn)感知、定位、控制和規(guī)劃等功能,如圖4所示。無(wú)人集卡因和干線物流自動(dòng)駕駛場(chǎng)景可以共用商用車(chē)底盤(pán)等硬件,也被賦予了自動(dòng)駕駛卡車(chē)車(chē)規(guī)登陸戰(zhàn)“先遣隊(duì)”的重任。
IGV和AGV長(zhǎng)得特別像,只是不再使用磁釘循跡方案,而是加裝了和集卡一樣的感知和定位傳感器來(lái)實(shí)現(xiàn)自動(dòng)駕駛功能,如圖5所示。長(zhǎng)得可能還是一個(gè)工業(yè)自動(dòng)化產(chǎn)品的樣子,但已經(jīng)換成了自動(dòng)駕駛的“芯”。IGV我一直覺(jué)得特別符合模塊化的思想,在上面搭載不同的車(chē)廂組件就可以成為不同的用途的車(chē)型。等到真無(wú)人到來(lái)的時(shí)候,不知道干線物流上會(huì)不會(huì)出現(xiàn)這種無(wú)車(chē)頭的車(chē)型。
無(wú)人集卡或是IGV相比AGV來(lái)說(shuō),平均成本降低30%~60%。并且對(duì)基礎(chǔ)設(shè)施無(wú)特殊要求。單車(chē)故障不會(huì)影響系統(tǒng)整體運(yùn)行,成了港口舊碼頭改造、新碼頭建造的首選方案。無(wú)人集卡或是IGV作為自動(dòng)駕駛的典型產(chǎn)品已經(jīng)陸續(xù)進(jìn)駐國(guó)內(nèi)各大港口,個(gè)別已經(jīng)開(kāi)啟大規(guī)模運(yùn)營(yíng),大部分還處于小規(guī)模驗(yàn)證階段。
二、港口的難點(diǎn)在于業(yè)務(wù)邏輯,而承載業(yè)務(wù)邏輯功能實(shí)現(xiàn)的是碼頭的各種平臺(tái)。在這個(gè)封閉的簡(jiǎn)單場(chǎng)景里,單車(chē)沒(méi)那么智能、也不需要那么智能。單車(chē)只要保證準(zhǔn)確的定位和簡(jiǎn)單的障礙物識(shí)別,不需要做感知預(yù)測(cè),也不需要進(jìn)行決策規(guī)劃,這怎么看都不算是一個(gè)完整的自動(dòng)駕駛產(chǎn)品。
這種觀點(diǎn)其實(shí)表達(dá)了當(dāng)前部分港口自動(dòng)駕駛發(fā)展的一個(gè)現(xiàn)狀:“重平臺(tái)智能、輕單車(chē)智能”。
重平臺(tái)智能是港口一直以來(lái)的優(yōu)良傳統(tǒng),作為匯集了眾多動(dòng)態(tài)要素的一個(gè)作戰(zhàn)單位,作為一個(gè)視效率為生命的鐵血軍團(tuán),沒(méi)有一個(gè)優(yōu)秀的指揮官很容易雞飛狗跳。想象一個(gè)場(chǎng)景:當(dāng)一艘裝載了成千上萬(wàn)個(gè)集裝箱的貨船即將抵港,停在哪個(gè)泊位合適,哪些岸橋負(fù)責(zé)卸船、集裝箱卸載順序、哪些水平運(yùn)輸設(shè)備參與轉(zhuǎn)運(yùn)、集裝箱堆場(chǎng)擺放位置等等,這些如果沒(méi)有個(gè)總指揮統(tǒng)籌,可能不至于亂成一鍋粥,但整體的作業(yè)效率肯定不高。
而在港口大大小小的平臺(tái)中,碼頭生產(chǎn)作業(yè)系統(tǒng)(Terminal Operation System,TOS)無(wú)疑是最耀眼的那顆星。TOS作為港口生產(chǎn)的核心軟件,其統(tǒng)籌集裝箱的裝卸,配載,堆場(chǎng),疏港等作業(yè)計(jì)劃,又被稱(chēng)為港口的“大腦”,直接影響著港口作業(yè)的效率,安全,成本。可以稱(chēng)得上是港口自動(dòng)化升級(jí)過(guò)程的巔峰之作。
而在無(wú)人集卡、IGV等成為水平運(yùn)輸設(shè)備隊(duì)伍里的寵兒之后,如何高效管理這些長(zhǎng)了眼睛、大腦的無(wú)人車(chē)成為擺在港口碼頭運(yùn)營(yíng)面前的甜蜜煩惱。重平臺(tái)智能的思維再次發(fā)揮了至關(guān)重要的作用,而繼承這一思想的優(yōu)秀產(chǎn)物便是VMS(Vehicle Management System,車(chē)隊(duì)管理系統(tǒng)),各家對(duì)這一產(chǎn)物的叫法略有不同,后統(tǒng)一以VMS指代。
VMS擔(dān)負(fù)上達(dá)天聽(tīng)(TOS),下體民情(無(wú)人集卡或IGV)的重任。VMS從TOS下達(dá)的碼頭生產(chǎn)作業(yè)任務(wù)中,分解出集裝箱的水平搬運(yùn)任務(wù),并自動(dòng)向無(wú)人集卡或IGV下達(dá)作業(yè)指令,從而實(shí)現(xiàn)最優(yōu)化地分配和調(diào)度無(wú)人集卡或IGV去執(zhí)行運(yùn)輸任務(wù)。VMS的具體職責(zé)包括:設(shè)備管理、作業(yè)任務(wù)管理、路徑規(guī)劃下發(fā)、行駛指令下發(fā)、對(duì)位管理等。
在這樣的背景下,無(wú)人集卡或IGV就像是還沒(méi)有獨(dú)立行為能力的孩童,日常三餐、休息睡覺(jué),都由VMS這個(gè)父母安排好。而自己要做的可能就是在父母的監(jiān)督下把飯吃好,把路走好。這的確也是目前無(wú)人集卡或IGV在部分港口碼頭的一個(gè)現(xiàn)狀,單車(chē)整體表現(xiàn)比較木訥。
面對(duì)前方行駛路徑上出現(xiàn)的障礙物,無(wú)人集卡或IGV不是特別需要識(shí)別障礙物是貓是狗,障礙物有何運(yùn)動(dòng)趨勢(shì),只需要死等直至障礙物主動(dòng)離開(kāi)。除非VMS下發(fā)新的變道任務(wù)及變道路徑,或遠(yuǎn)程駕駛調(diào)度員接管并進(jìn)行遠(yuǎn)程駕駛。無(wú)人集卡或IGV雖然也有不遜于干線物流自動(dòng)駕駛卡車(chē)的傳感器配置,但她的四五個(gè)激光雷達(dá)主要用來(lái)進(jìn)行輔助定位和障礙物有無(wú)檢測(cè),她的七八個(gè)攝像頭主要用來(lái)進(jìn)行遠(yuǎn)程測(cè)試或遠(yuǎn)程控制。
但是襁褓中的孩子終究要長(zhǎng)大,“重平臺(tái)智能、輕單車(chē)智能”能讓100臺(tái)無(wú)人集卡或IGV在岸橋和堆場(chǎng)之間有條不紊的跑起來(lái),可以向港口碼頭運(yùn)營(yíng)方證明自動(dòng)駕駛技術(shù)在港口內(nèi)是行得通的,政治方向是正確的。但這種策略很難滿足港口碼頭運(yùn)營(yíng)方的真正需求“降本增效”,畢竟老司機(jī)眼里可容不下“龜速”一樣的前車(chē),也不會(huì)被一塊臨時(shí)的錐桶困在原地。
所以當(dāng)前的“重平臺(tái)智能、輕單車(chē)智能”只是落地的第一步,“重平臺(tái)智能、重單車(chē)智能”必將在第二階段承擔(dān)起“增效的重任”,這也是港口自動(dòng)駕駛亟需進(jìn)步的地方。
三、為什么各種政策里都將自動(dòng)駕駛和智能港口兩個(gè)場(chǎng)景區(qū)分開(kāi)?
遠(yuǎn)的不提,就拿科技部2022年8月15日公布的《關(guān)于支持建設(shè)新一代人工智能示范應(yīng)用場(chǎng)景的通知》來(lái)說(shuō),下簡(jiǎn)稱(chēng)《通知》。《通知》的目標(biāo)打造形成一批可復(fù)制、可推廣的標(biāo)桿型人工智能示范應(yīng)用場(chǎng)景,并明確了首批支持建設(shè)的十個(gè)示范應(yīng)用場(chǎng)景,其中兩個(gè)就是智能港口和自動(dòng)駕駛。你沒(méi)有看錯(cuò),科技部將智能港口和自動(dòng)駕駛列為同一層級(jí)的場(chǎng)景。
《通知》對(duì)智能港口場(chǎng)景的描述如下:針對(duì)港口大型碼頭泊位、岸橋管理以及堆場(chǎng)、配載調(diào)度等關(guān)鍵業(yè)務(wù)環(huán)節(jié),運(yùn)用智能化碼頭機(jī)械、數(shù)字孿生集成生產(chǎn)時(shí)空管控系統(tǒng)等關(guān)鍵技術(shù),開(kāi)展船舶自動(dòng)配載、自動(dòng)作業(yè)路徑及泊位計(jì)劃優(yōu)化、水平運(yùn)輸車(chē)輛及新型軌道交通設(shè)備的協(xié)同調(diào)度、智能堆場(chǎng)選位等場(chǎng)景應(yīng)用,形成覆蓋碼頭運(yùn)作、運(yùn)行監(jiān)測(cè)與設(shè)備健康管理的智能化解決方案,打造世界一流水平的超大型智能港口。
《通知》對(duì)自動(dòng)駕駛場(chǎng)景的描述如下:針對(duì)自動(dòng)駕駛從特定道路向常規(guī)道路進(jìn)一步拓展需求,運(yùn)用車(chē)端與路端傳感器融合的高準(zhǔn)確環(huán)境感知與超視距信息共享、車(chē)路云一體化的協(xié)同決策與控制等關(guān)鍵技術(shù),開(kāi)展交叉路口、環(huán)島、匝道等復(fù)雜行車(chē)條件下自動(dòng)駕駛場(chǎng)景示范應(yīng)用,推動(dòng)高速公路無(wú)人物流、高級(jí)別自動(dòng)駕駛汽車(chē)、智能網(wǎng)聯(lián)公交車(chē)、自主代客泊車(chē)等場(chǎng)景發(fā)展。
所以在官方眼里,智能港口和自動(dòng)駕駛都是人工智能技術(shù)的典型應(yīng)用場(chǎng)景,港口強(qiáng)調(diào)的是協(xié)同調(diào)度,智能選位,自動(dòng)駕駛強(qiáng)調(diào)的是融合感知、協(xié)同決策與控制。其實(shí)這并不矛盾,港口是人工智能落地的一個(gè)綜合場(chǎng)景,既包括水平運(yùn)輸環(huán)節(jié)的自動(dòng)駕駛,還包括所有工程設(shè)備的協(xié)同調(diào)度、智能理貨、智慧閘口等。
且自動(dòng)駕駛應(yīng)用的水平運(yùn)輸這個(gè)環(huán)節(jié),放在整個(gè)港口的來(lái)說(shuō),重要但分量沒(méi)那么重。畢竟100臺(tái)無(wú)人集卡或IGV加起來(lái)的采購(gòu)成本可能僅占全新智慧化碼頭投資的1/30。但在干線物流、Robobus等自動(dòng)駕駛場(chǎng)景中,如果走單車(chē)智能的方案,自動(dòng)駕駛車(chē)輛就是全部的家當(dāng)。
四、寫(xiě)在最后
港口作為自動(dòng)駕駛的典型應(yīng)用場(chǎng)景,其實(shí)爭(zhēng)議不大。但業(yè)界其實(shí)一直好奇,隨著自動(dòng)駕駛在港口的大規(guī)模落地,真正的降本增效成果如何?是賠本賺吆喝,還是悶聲發(fā)大財(cái)?
審核編輯 :李倩
-
智能化
+關(guān)注
關(guān)注
15文章
5124瀏覽量
57201 -
人工智能
+關(guān)注
關(guān)注
1806文章
48984瀏覽量
248905 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14302瀏覽量
170470
原文標(biāo)題:港口自動(dòng)駕駛,是偽自動(dòng)駕駛商用場(chǎng)景嗎?
文章出處:【微信號(hào):阿寶1990,微信公眾號(hào):阿寶1990】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
卡車(chē)、礦車(chē)的自動(dòng)駕駛和乘用車(chē)的自動(dòng)駕駛在技術(shù)要求上有何不同?

自動(dòng)駕駛安全基石:ODD
新能源車(chē)軟件單元測(cè)試深度解析:自動(dòng)駕駛系統(tǒng)視角

劉強(qiáng)東,進(jìn)軍汽車(chē)領(lǐng)域# 京東# 自動(dòng)駕駛# 自動(dòng)駕駛出租車(chē)# 京東自動(dòng)駕駛快遞車(chē)

自動(dòng)駕駛開(kāi)發(fā)需要海量數(shù)據(jù),但真實(shí)數(shù)據(jù)難以覆蓋所有復(fù)雜場(chǎng)景,如何解決?# 自動(dòng)駕駛# 仿真# #汽車(chē)電子
一文聊聊自動(dòng)駕駛測(cè)試技術(shù)的挑戰(zhàn)與創(chuàng)新


什么是自動(dòng)駕駛場(chǎng)景仿真軟件——VTD(Virtial Test Drive)?#ADAS #智能駕駛
自動(dòng)駕駛汽車(chē)安全嗎?

基于場(chǎng)景的自動(dòng)駕駛驗(yàn)證策略


自動(dòng)駕駛HiL測(cè)試方案案例分析--ADS HiL測(cè)試系統(tǒng)#ADAS #自動(dòng)駕駛 #VTHiL

自動(dòng)駕駛HiL測(cè)試方案——攝像頭仿真之視頻注入#ADAS #自動(dòng)駕駛 #VTHiL

自動(dòng)駕駛HiL測(cè)試方案 ——場(chǎng)景仿真3D演示#ADAS #自動(dòng)駕駛 #VTHiL






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論