") 軟體機(jī)械手到底有多軟?
軟體機(jī)械手到底有多軟?
與其復(fù)雜化機(jī)械手的控制策略,不如換成簡單靈活的機(jī)械觸手。
抓娃娃機(jī)是一種很常見的游樂設(shè)備,其中的機(jī)器抓手很難成功抓到娃娃。實(shí)際上,「抓娃娃」的應(yīng)用場景類似于在深海中抓取海底的珊瑚、文物等等。這些東西往往非常珍貴且脆弱易碎,因此人們嘗試構(gòu)建靈活穩(wěn)定的機(jī)械抓手。
當(dāng)前大多數(shù)機(jī)械手依靠嵌入式傳感器、復(fù)雜的反饋回路或先進(jìn)的機(jī)器學(xué)習(xí)算法,結(jié)合操作員的技能,來抓取易碎、形狀不規(guī)則的物體。
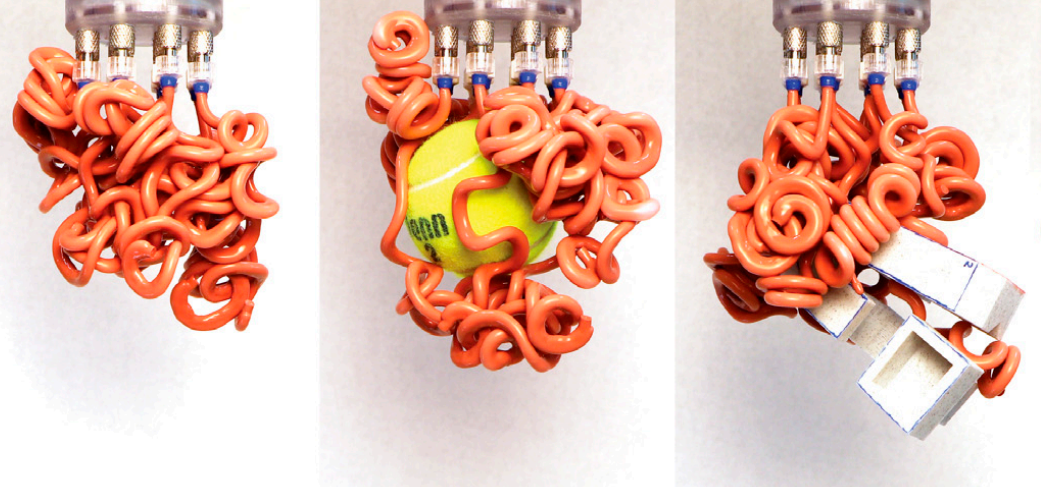
現(xiàn)在,來自哈佛大學(xué)約翰 · 保爾森工程與應(yīng)用科學(xué)學(xué)院(SEAS)的研究人員展示了一種更簡單的方法。他們從大自然汲取靈感,設(shè)計(jì)了一種新型柔軟的機(jī)械抓手,使用一組細(xì)長的觸手來纏繞和捕獲物體,類似于水母、章魚收集獵物的方式。
我們先來看一下這個(gè)機(jī)械手抓取物體的效果,例如抓取一個(gè)樹狀物體
可以發(fā)現(xiàn),該機(jī)械手利用柔軟觸手易于形變的特點(diǎn),讓觸手像繩子一樣卷曲并纏繞在物體上,實(shí)現(xiàn)了「抓握」的功能。
研究概述
首先,該研究重新思考了機(jī)器手與物體互動(dòng)的方式。論文第一作者 Kaitlyn Becker 介紹稱:「通過利用軟體機(jī)器人的自然柔順的優(yōu)勢,我們?cè)O(shè)計(jì)了一種整體性能大于各部分總和的機(jī)械抓手,和一種能夠以最少的規(guī)劃和感知適應(yīng)一系列復(fù)雜物體的抓取策略。」其中,機(jī)械觸手依靠簡單的充氣來保持形態(tài),不需要傳感、規(guī)劃或反饋控制。研究論文發(fā)表在美國國家科學(xué)院院刊(PNAS)上。
論文地址:https://www.pnas.org/doi/10.1073/pnas.2209819119
和動(dòng)物的觸手一樣,雖然一根機(jī)械觸手很柔弱,但多根觸手組合在一起就可以牢牢抓住沉重且形狀各異的物體。抓手的力量和適應(yīng)性來自于它與試圖抓住的物體糾纏在一起的能力。
一兩根觸手無法成功抓取物體。
每根機(jī)械觸手都是等長的空心橡膠管,這些橡膠管受壓會(huì)發(fā)生形變并卷曲纏繞在物體上。整個(gè)機(jī)械手的關(guān)鍵原理是觸手的每一次纏繞都會(huì)增加抓握的強(qiáng)度;想要釋放物體時(shí),只需對(duì)這些觸手減壓,讓它們解開纏繞,就可以放開物體。
該研究使用模擬和實(shí)驗(yàn)來測試該機(jī)械抓手的功能,嘗試抓起一系列物體,包括各種室內(nèi)植物和玩具。例如抓取環(huán)狀物體,并將它平放在桌面上:
從外部橫向抓取一段管狀物體:
還可以從內(nèi)部抓取同一根管子:

抓取一個(gè)球體:

抓手可用于實(shí)際應(yīng)用,以抓取用于農(nóng)業(yè)生產(chǎn)和配送的軟水果和蔬菜、醫(yī)療環(huán)境中的脆弱組織,甚至倉庫中不規(guī)則形狀的物體,例如玻璃器皿。
總的來說,機(jī)械手的抓取原理結(jié)合了 L. Mahadevan 教授在纏結(jié)細(xì)絲的拓?fù)淞W(xué)方面的研究和 Robert Wood 教授關(guān)于軟體機(jī)器人抓手的研究。
這種新的機(jī)器人抓取方法補(bǔ)充了現(xiàn)有的解決方案,將需要復(fù)雜控制策略的簡單傳統(tǒng)夾持器替換為易于控制且形態(tài)復(fù)雜的細(xì)絲觸手,這些觸手可以通過非常簡單的控制進(jìn)行操作,擴(kuò)大了機(jī)械抓手的抓取范圍。
審核編輯 :李倩
-
機(jī)器人
+關(guān)注
關(guān)注
211文章
28738瀏覽量
208833 -
機(jī)械手
+關(guān)注
關(guān)注
7文章
339瀏覽量
29783 -
機(jī)器學(xué)習(xí)
+關(guān)注
關(guān)注
66文章
8453瀏覽量
133149
原文標(biāo)題:軟體機(jī)械手到底有多軟?
文章出處:【微信號(hào):indRobot,微信公眾號(hào):工業(yè)機(jī)器人】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
TLC2578芯片中FS與SDI到底有什么作用?
案例分析,搬運(yùn)機(jī)械手如何選擇電機(jī)?

RK3506到底有多香?搶先看核心板詳細(xì)參數(shù)配置
24位或者說高分辨率的AD到底有什么用呢?
差分輸入和和單端輸入在本質(zhì)上到底有什么區(qū)別?
TFP401APZP到底有沒有HSYNC輸出?
高鐵站網(wǎng)約車數(shù)智出行到底有多智能?
機(jī)械手 OEM 的應(yīng)用
求助,這個(gè)電路U1A運(yùn)放同相端的R1電阻到底有什么作用啊?
“快、準(zhǔn)、穩(wěn)”——阿普奇AK5在機(jī)械手領(lǐng)域的應(yīng)用解決方案

機(jī)器視覺控制機(jī)械手的具體過程
PLC在機(jī)械手控制系統(tǒng)中的具體應(yīng)用
EtherCAT運(yùn)動(dòng)控制器Delta機(jī)械手應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論