 7.2小時完成868個HBM封裝端口——Cadence Clarity 3D Solver仿真案例詳解
7.2小時完成868個HBM封裝端口——Cadence Clarity 3D Solver仿真案例詳解

導讀:Cadence公司在2019年推出 Clarity 3D Solver場求解器,正式進軍快速增長的系統級分析和設計市場。與傳統的三維場求解器相比,Cadence Clarity 3D Solver場求解器在精度達到黃金標準的同時,擁有高達10倍的仿真性能和近乎無限的處理能力。得益于最先進的分布式并行計算技術,Clarity 3D 場求解器有效地解決了芯片、封裝、PCB、接插件和電纜設計等復雜的3D結構設計中的電磁(EM)挑戰,為任何擁有桌面電腦、高性能計算(HPC)或云計算資源的工程師提供真正的3D分析支持。Clarity 3D 場求解器可以輕松讀取所有標準芯片、IC封裝和PCB設計實現平臺的數據,同時為使用Cadence Allegro 和Virtuoso 設計實現平臺的團隊提供專屬集成優勢。
一、關于Clarity 3D Solver
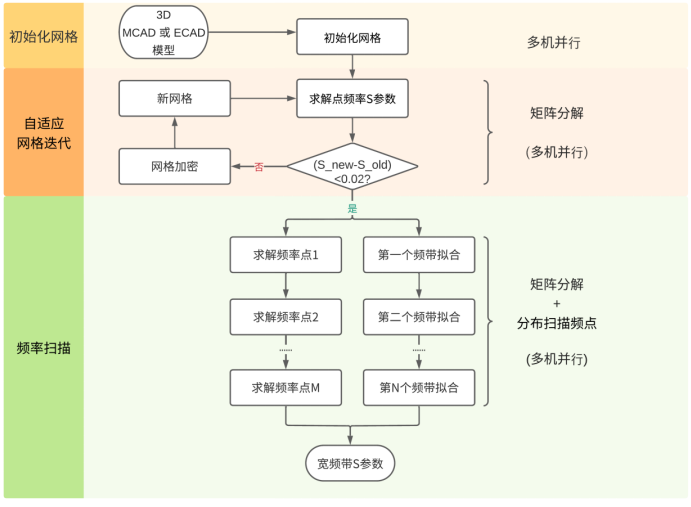
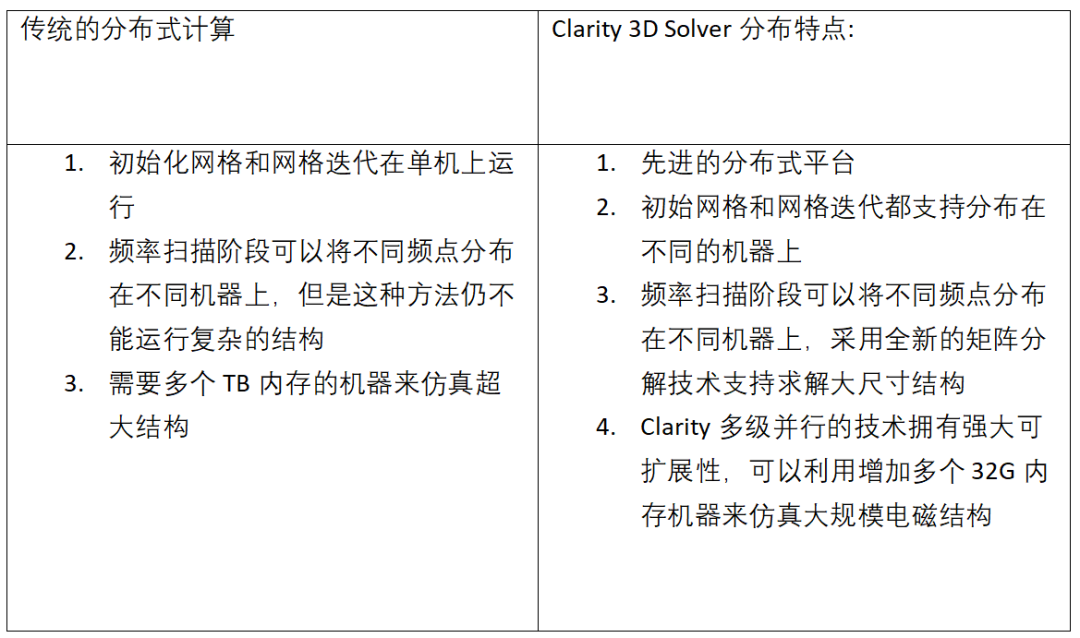
基于有限元電磁場的商業軟件,通常包括三個仿真階段:初始化網格、網格迭代、頻率掃描。傳統的并行計算僅僅會在頻率掃描階段,將多個頻點分配到不同的計算機節點上。但是在求解每一個頻點時,仿真時間并沒有減少而且仍然需要很大的內存。并且,對于復雜的電磁結構仿真,傳統的軟件很難在仿真之前預測所需要的內存,因此經常會在仿真進程過半后由于內存不足而終止仿真,浪費前期的所有工作。
Clarity 3D Solver 采用了全新的分布式計算平臺以及突破性的網格和矩陣分解技術,在初始化網格、網格迭代以及頻率掃描三個階段都支持多機并行的分布式計算。
二、分布式網格劃分
Clarity 3D Solver 2022版本新增了分布式網格劃分算法,進一步發展了其先進的網格劃分技術,包括基于層結構的 LMesh 和任意三維結構的XMesh 兩種方法。這兩種技術都能將初始網格處理速度提高 10 倍以上,意味著大幅減少的仿真運行時間。
1、Xmesh - 大規模分布式并行網格劃分技術
初始網格和自適應網格都支持多機分布式并行處理
不損失準確性,但模擬結果比沒有并行網格劃分時的 Clarity 版本快 3 倍
新的3D網格劃分技術無需用戶提供額外輸入并且更加穩定
2、Lmesh – 基于層結構的大規模分布式并行網格劃分技術
超快速預處理
前所未有的網格生成成功率(自動修復)
初始網格和自適應網格都支持多機分布式并行處理
對于復雜的布局設計,甚至比 XMesh 更快
僅在 Clarity 3D Layout 中可用
新的3D網格劃分技術無需用戶提供額外輸入并且更加穩定
三、網格迭代和頻率掃描
區別于傳統的直接求解完整有限元矩陣,Clarity 3D Solver 采用了先進的矩陣分解技術,能夠在多個較小內存的機器群組上完成復雜電磁結構仿真。Clarity 3D Solver的并行分布式技術特點如下:
1、沒有任何精度的損失
2、幾乎無限的容量,即使只有一臺32核/256GB內存的電腦,也可以仿真幾千萬網格規模,而不會出現內存不足的問題
3、強大的可擴展性。對于復雜設計, 通過增加計算機CPU資源來達到幾乎線性的仿真效率提高
4、充分利用已有機器。可以利用增加多個32G內存機器來加速大規模電磁仿真
總結
四、成功案例
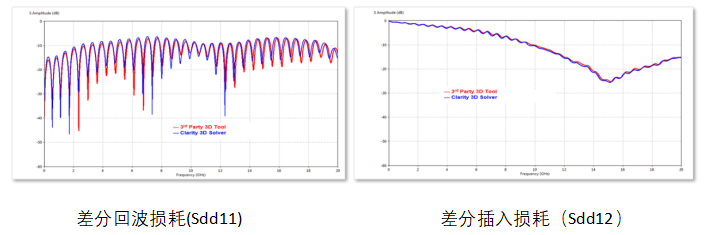
案例1:2個倒裝芯片封裝安裝在6層PCB的仿真
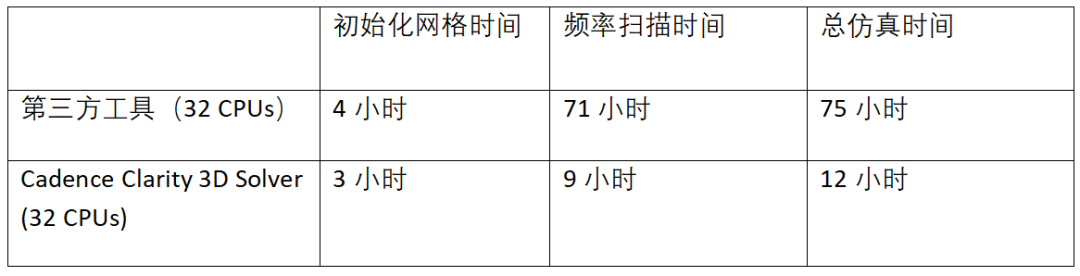
從結果對比來看,除效率有了明顯的提升之外,精度方面,在0-20GHz、回波損耗和插入損耗上,Clarity 3D Solver的結果和第三方軟件都有很好的吻合。
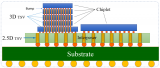
案例2:HBM InFO 3D Modeling
這是一個擁有兩個芯片(SOC芯片和HBM芯片)的4 層晶圓級封裝結構,線寬和線間距都是2um。仿真包含了128根信號和2個電源以及一個地網絡,總共有868個端口。對于傳統的仿真工具而言,這一創新型的封裝結構過于復雜,難以在較短時間內準確仿真。
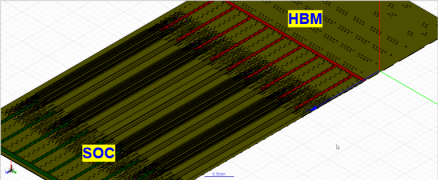
Clarity 3D Solver 利用128 CPU以及每個CPU配置的8G內存機器,在此配置下7. 2小時完成了仿真。由于無需拆分設計,既保證了仿真結果的精準度又大幅減少了仿真運行時間,這是其他電磁場軟件達不到的效果。
審核編輯:湯梓紅
-
3D
+關注
關注
9文章
2959瀏覽量
110789 -
封裝
+關注
關注
128文章
8685瀏覽量
145514 -
Cadence
+關注
關注
67文章
975瀏覽量
144427 -
HBM
+關注
關注
2文章
412瀏覽量
15240
原文標題:7.2小時完成868個HBM封裝端口—— Cadence Clarity 3D Solver 仿真案例詳解
文章出處:【微信號:sim_ol,微信公眾號:模擬在線】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
TechWiz LCD 3D應用:FFS仿真
文件嵌入詳解(一):在PCB封裝庫中嵌入3D模型
Cadence推出HBM4 12.8Gbps IP內存系統解決方案
TechWiz LCD 3D應用:撓曲電效用仿真

3D封裝與系統級封裝的背景體系解析介紹

SciChart 3D for WPF圖表庫

先進封裝技術-19 HBM與3D封裝仿真

TechWiz LCD 3D應用:撓曲電效用仿真
技術資訊 | 2.5D 與 3D 封裝

Simcenter 3D仿真軟件

一文理解2.5D和3D封裝技術







 工商網監
工商網監
評論