") 當(dāng)代自動(dòng)駕駛產(chǎn)業(yè)的起源-DARPA挑戰(zhàn)賽
當(dāng)代自動(dòng)駕駛產(chǎn)業(yè)的起源-DARPA挑戰(zhàn)賽
很多人很關(guān)心自動(dòng)駕駛是怎么起源的?為什么人類需要自動(dòng)駕駛?這就需要先從自動(dòng)駕駛帶給人類的好處說起,我們一般會(huì)聽到他對(duì)人類產(chǎn)生以下好處:
安全,可以減少道路的事故。根據(jù)歐美相關(guān)政府?dāng)?shù)據(jù), 94% 的撞車事故的因素是駕駛員的行為或錯(cuò)誤。而自動(dòng)駕駛汽車,由于是機(jī)器,所以沒有情緒,沒有疲勞,沒有分心,他可以幫助減少駕駛員的錯(cuò)誤,從而增加安全。
節(jié)能,可以通過自動(dòng)駕駛優(yōu)化速度,規(guī)劃出行從而可以減少能源損耗。
增效,大規(guī)模的使用自動(dòng)駕駛,可以把人類從駕駛中解放時(shí)間,從而提高人類的時(shí)間效率。
所以人類會(huì)愿意發(fā)明與創(chuàng)造去推動(dòng)此項(xiàng)科技的應(yīng)用落地發(fā)展。例如在無(wú)線電通訊蓬勃發(fā)展的20世紀(jì)初,美國(guó)發(fā)明家弗朗西斯·胡迪納(Francis Houdina)就利用無(wú)線電技術(shù)在美國(guó)曼哈頓街道上演示了一輛無(wú)人駕駛的汽車。 而后60年代太空競(jìng)賽月球登陸車?yán)脭z像頭跟隨路面開啟了基于圖像算法的自動(dòng)駕駛研究時(shí)代。 最后DARPA(Defense Advanced Research Projects Agency)在2004年和2005年,2007年分別舉行了關(guān)于自動(dòng)駕駛的挑戰(zhàn)賽,特別是2007年的Urban Challenge城市挑戰(zhàn)賽。開啟了自動(dòng)駕駛產(chǎn)業(yè)起源,當(dāng)前的自動(dòng)駕駛技術(shù)應(yīng)用都來(lái)自于此挑戰(zhàn)的概念。

接下來(lái)本文將結(jié)合DARPA相關(guān)資料,重點(diǎn)介紹DARPA挑戰(zhàn)賽,并整理以下方面信息:
DARPA挑戰(zhàn)賽的起源
DARPA挑戰(zhàn)賽的內(nèi)容
DARPA挑戰(zhàn)賽獲獎(jiǎng)車輛技術(shù)
DARPA挑戰(zhàn)賽對(duì)當(dāng)前自動(dòng)駕駛的影響
希望通過以上信息給大家?guī)?lái)一些對(duì)于當(dāng)代自動(dòng)駕駛的技術(shù)發(fā)展的信息和啟發(fā),如果能引發(fā)關(guān)于驅(qū)動(dòng)和預(yù)測(cè)科技的發(fā)展進(jìn)步的思考就太棒了。DARPA挑戰(zhàn)賽的起源DARPA挑戰(zhàn)賽,先不管這是什么賽事,先看看舉辦單位DARPA,也就是美國(guó)國(guó)防部高級(jí)研究計(jì)劃局。好吧攤牌了,當(dāng)代自動(dòng)駕駛產(chǎn)業(yè)落地的催生萌芽其實(shí)是軍事。 當(dāng)然美國(guó)還有很多大挑戰(zhàn)GrandChallenge,美國(guó)認(rèn)為大挑戰(zhàn)可以:
幫助創(chuàng)造未來(lái)的產(chǎn)業(yè)和就業(yè)機(jī)會(huì);
擴(kuò)展人類對(duì)我們自己和我們周圍世界的知識(shí)的前沿;
幫助解決與能源、健康、教育、環(huán)境、國(guó)家安全和全球發(fā)展相關(guān)的重要問題;
充當(dāng)公共和私營(yíng)部門合作的“北極星”。
這種以國(guó)家牽頭,向社會(huì)開放廣泛報(bào)名、激發(fā)創(chuàng)新的項(xiàng)目,是一個(gè)開放和激發(fā)社會(huì)活力的好項(xiàng)目。 回到DARPA Challenge,其實(shí)DARPA挑戰(zhàn)賽之前美國(guó)DARPA進(jìn)行了另外一項(xiàng)計(jì)劃,DARPA Strategic computing program中文就是“戰(zhàn)略計(jì)算計(jì)劃”,該計(jì)劃從 1983 年到 1993年資助了先進(jìn)計(jì)算機(jī)硬件和人工智能AI的研究。該計(jì)劃旨在支持在規(guī)定的十年時(shí)間內(nèi)開發(fā)機(jī)器智能所需的各種項(xiàng)目,包含從芯片設(shè)計(jì)到制造,計(jì)算機(jī)體系結(jié)構(gòu)到人工智能軟件。美國(guó)國(guó)防部在該項(xiàng)目上總共花費(fèi)了 10 億美元,花費(fèi)一半在工業(yè)界,一半在大學(xué)和政府實(shí)驗(yàn)室。 當(dāng)然這項(xiàng)計(jì)劃也算是受1982年日本的第五代計(jì)算機(jī)系統(tǒng)的10年計(jì)劃刺激,第五代計(jì)算機(jī)系統(tǒng)其實(shí)就是當(dāng)前人工智能火熱的智能計(jì)算系統(tǒng),也就是多運(yùn)算單元組合形成超算系統(tǒng)——而不是之前通過專注于增加單個(gè) CPU 中邏輯元素的數(shù)量來(lái)增加算力的方式。現(xiàn)在英偉達(dá)以及Tesla的Dojo就是采用此類方式,多計(jì)算單元CPU和GPU的組合形成超算,其中一個(gè)重要的技術(shù)是各個(gè)運(yùn)算單元之間的高速接口連接,具體了解可以點(diǎn)擊《被美國(guó)禁售的A100和H100 ,MI250人工智能芯片能干啥?》和下面視頻可以了解第五代計(jì)算機(jī)系統(tǒng)。 而DARPA Strategic computing program戰(zhàn)略計(jì)算計(jì)劃,他的落地應(yīng)用DARPA設(shè)想了三個(gè)軍事“任務(wù)計(jì)劃”:
給美國(guó)陸軍開發(fā)自動(dòng)駕駛陸地車輛。
給空軍開發(fā)飛行員助理,也就是自動(dòng)飛控系統(tǒng)。
給海軍開發(fā)航空母艦作戰(zhàn)管理系統(tǒng)。
到 20 世紀(jì) 80 年代后期,DARPA Strategic computing program戰(zhàn)略計(jì)算計(jì)劃催生了計(jì)算機(jī)、芯片等在美國(guó)的大力發(fā)展,但是該項(xiàng)目無(wú)法成功地創(chuàng)造落地出預(yù)期水平的機(jī)器智能。DARPA當(dāng)時(shí)的領(lǐng)導(dǎo)人Schwarz認(rèn)為應(yīng)該只將資金集中在那些最有希望的技術(shù)上。用他的話說,DARPA 應(yīng)該“沖浪”,而不是“狗槳”,他強(qiáng)烈認(rèn)為 AI 不是“下一波浪潮”。 而DARPA的自動(dòng)駕駛汽車落地的是美國(guó)武器公司馬丁公司(后來(lái)并入了鼎鼎大名的軍火公司洛克希德·馬丁),顯然他們當(dāng)時(shí)造出的自動(dòng)駕駛車輛可能難以量產(chǎn)或者實(shí)用。 但彼時(shí)2001年,美國(guó)深陷阿富汗戰(zhàn)爭(zhēng),為了應(yīng)對(duì)路邊炸彈引起的大量傷亡,于是美國(guó)國(guó)會(huì)通過了一項(xiàng)法案:在2015年,軍方三分之一車輛必須進(jìn)行無(wú)人駕駛。 到2003年,伊拉克戰(zhàn)爭(zhēng)爆發(fā),無(wú)人駕駛技術(shù)還沒有大的進(jìn)展。根據(jù)法案,國(guó)會(huì)命令DARPA負(fù)責(zé)推動(dòng)相關(guān)技術(shù)的發(fā)展,授權(quán)該局對(duì)無(wú)人駕駛汽車的研發(fā)人員進(jìn)行現(xiàn)金獎(jiǎng)勵(lì)。有了獎(jiǎng)金的支持,DARPA決定另辟蹊徑,舉辦一項(xiàng)獎(jiǎng)金為100萬(wàn)美元的公開競(jìng)賽,吸引更多的團(tuán)隊(duì)投入智能車研究。所以從2004到2007年,DARPA共贊助了三場(chǎng)公路賽事,分別是:2004年和2005年DARPA大挑戰(zhàn)賽和2007的DARPA城市挑戰(zhàn)賽,這幾項(xiàng)賽事奠定了當(dāng)代自動(dòng)駕駛汽車的技術(shù)基礎(chǔ)。DARPA挑戰(zhàn)賽的內(nèi)容2004年和2005年DARPA大挑戰(zhàn)賽,這兩次挑戰(zhàn)的基本性質(zhì)一樣,在典型的戰(zhàn)地場(chǎng)景,希望汽車能夠按照DARPA給出GPS路線避障安全抵達(dá)目的地。 2004年3月13日在美國(guó)莫哈韋沙漠地區(qū)舉行的第一屆無(wú)人駕駛汽車比賽。規(guī)定10小時(shí)內(nèi)完成這條 150 英里(240 公里)的越野路線。最后沒有一輛機(jī)器人車輛完成路線。卡內(nèi)基梅隆大學(xué)紅隊(duì)的車輛行駛了最遠(yuǎn)的距離,完成了 11.78 公里(7.32 英里)的路線。100萬(wàn)美元的獎(jiǎng)金無(wú)人認(rèn)領(lǐng)。

當(dāng)時(shí)美國(guó)的頭條新聞會(huì)嘲笑DARPA挑戰(zhàn)賽是一個(gè)夸大其詞的科學(xué)項(xiàng)目。《連線》雜志評(píng)論道“挫敗:DARPA機(jī)器人都倒下了。美國(guó)有線電視新聞網(wǎng)寫道“沒有人贏,甚至沒有人接近”。就連《大眾科學(xué)》雜志也發(fā)文指責(zé)聯(lián)邦調(diào)查局:“如果 DARPA 明顯犯了什么罪,那它就沒有管理過高的期望。比賽經(jīng)理 Negron 在方格旗出現(xiàn)前的幾個(gè)月里,沒有將首屆大挑戰(zhàn)賽標(biāo)榜為未準(zhǔn)備好黃金時(shí)段的現(xiàn)場(chǎng)測(cè)試,以校準(zhǔn)未來(lái)努力所需的內(nèi)容,而是繼續(xù)預(yù)測(cè)勝利者。” DARPA沒有一個(gè)勝利者,但尷尬的賽事負(fù)責(zé)人Tether 選擇專注于積極的方面。看著這些科技的參與者在沙漠中競(jìng)爭(zhēng)又聚在一起,交換故事和策略,他并不擔(dān)心他們留下的鋼鐵尸體和燒毀的輪胎。這次偉大比賽證明了創(chuàng)造自動(dòng)駕駛汽車的動(dòng)力就在那里,而且它找到了有動(dòng)力實(shí)現(xiàn)這一目標(biāo)的人才。他并不打算放棄。有記者問他現(xiàn)在打算怎么辦。“我們會(huì)再做一次,”Tether 說。“而這一次,獎(jiǎng)金將是 200 萬(wàn)美元。” 于是一年之后,2005年DARPA 大挑戰(zhàn)賽開始了,獎(jiǎng)金翻倍200萬(wàn)美金。這次無(wú)人駕駛汽車比賽是 212 公里(132 英里)的越野賽道。最后195 支隊(duì)伍中有五支跑完賽道。其中斯坦福大學(xué)的汽車“Stanley”以 6 小時(shí) 53 分鐘的成績(jī)獲得第一名,贏得了 200 萬(wàn)美元的獎(jiǎng)金。

至此2005年DARPA大挑戰(zhàn)賽開啟了當(dāng)代自動(dòng)駕駛汽車的一個(gè)里程碑,證明了可行性。但是2004年和2005年的DARPA大挑戰(zhàn)賽考驗(yàn)的是給出線路,然后躲避靜態(tài)障礙,并且所有參賽車輛不會(huì)在比賽中有相會(huì)的交集。可是現(xiàn)實(shí)生活中的自動(dòng)駕駛車輛必須要能夠感知其他動(dòng)態(tài)的交通參與者,并且與其進(jìn)行互動(dòng),最后到達(dá)目的地。 所以DARPA決定組織新的挑戰(zhàn),也就是2007 Urban challenge城市挑戰(zhàn)賽,他的設(shè)計(jì)就是為了探索自動(dòng)駕駛汽車在有其他交通參與者的情況下,進(jìn)行自動(dòng)駕駛抵達(dá)目的地,也就是推進(jìn)自動(dòng)駕駛更貼近現(xiàn)實(shí)。 2007年Urban challenge城市挑戰(zhàn)賽在美國(guó)西部加利福尼亞州維克多維爾,現(xiàn)已關(guān)閉的喬治空軍基地(目前用作南加州物流機(jī)場(chǎng))所在地舉行。此次的獎(jiǎng)金共計(jì)350萬(wàn)美金,規(guī)定在6個(gè)小時(shí)內(nèi)完成96公里的路程且最高車速不超過48km/h,里程中重點(diǎn)考察挑戰(zhàn)交通中的互動(dòng)例如:
十字路口
交匯
泊車
臟路面
此次挑戰(zhàn)賽11輛自動(dòng)駕駛汽車參加了最后的決賽,比賽的時(shí)候DARPA官方在賽道上增加了30輛帶司機(jī)的汽車,以增加交通密度。
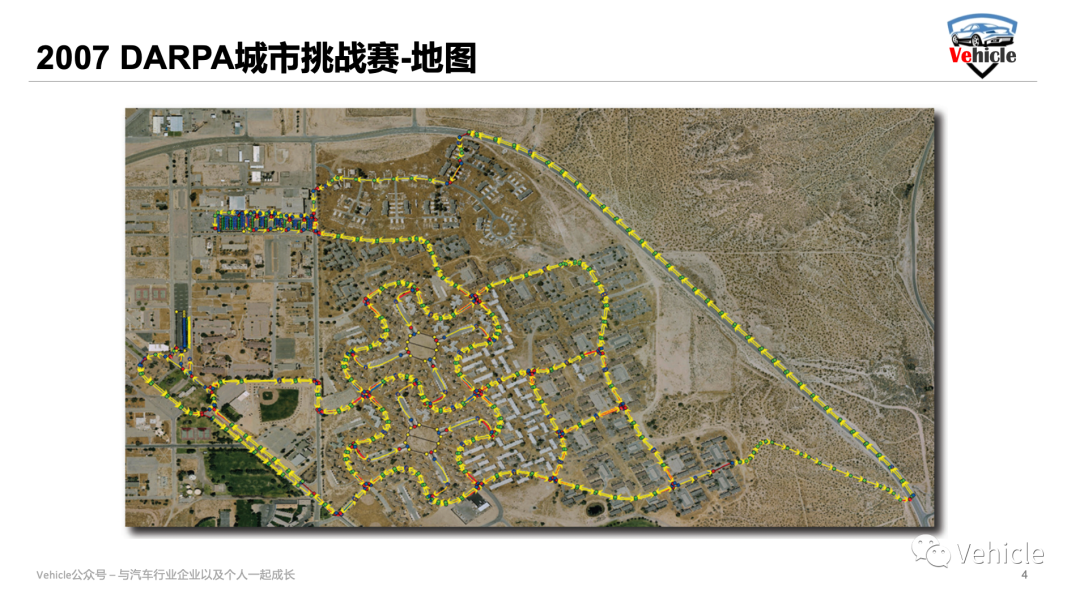
參賽團(tuán)隊(duì)事先對(duì)賽道一無(wú)所知。DARPA在比賽前24小時(shí)向所有車隊(duì)提供了一份路線網(wǎng)絡(luò)定義文件(RNDF),RNDF與車載GPS導(dǎo)航系統(tǒng)使用的數(shù)字街道地圖非常相似,該文件以GPS坐標(biāo)定義了道路位置、車道數(shù)、交叉口甚至停車位位置。比賽當(dāng)天,每個(gè)團(tuán)隊(duì)都得到了第二個(gè)唯一的文件,稱為任務(wù)定義文件(MDF)。該文件僅包含RNDF內(nèi)車輛需要穿越的檢查站(或位置)列表,這些車輛必須按照特定順序訪問檢查站,就像無(wú)人駕駛軍車在執(zhí)行任務(wù)時(shí)必須執(zhí)行的操作一樣。 最終6輛車汽車完成了比賽,其中3輛按照規(guī)定的時(shí)間完成,獲得獎(jiǎng)金。DARPA挑戰(zhàn)賽獲獎(jiǎng)車輛技術(shù)最終完成的比賽的有:
卡內(nèi)基梅隆大學(xué)的Boss 用時(shí)420第一名; 在整個(gè)過程中平均每小時(shí)大約 14 英里(22.4 公里/小時(shí))贏得200萬(wàn)美金。
斯坦福大學(xué)的Junior 用時(shí)428第二名;在整個(gè)過程中平均每小時(shí)約 13.7 英里(22.0 公里/小時(shí))贏得100萬(wàn)美金。
弗吉尼亞理工大學(xué)的Odin用時(shí)438第三名;在整個(gè)過程中平均速度略低于每小時(shí) 13 英里(21 公里/小時(shí)).
麻省理工學(xué)院的Talos用時(shí)大約6個(gè)小時(shí)第 4 名
另外還有賓夕法尼亞大學(xué)的Little Ben和康奈爾大學(xué)的Skynet超過 6 小時(shí)限制,成功完成挑戰(zhàn)線路。所以共計(jì) 6 支隊(duì)伍完成線路。

下圖為獲獎(jiǎng)以及完成比賽的車輛照片,是不是和我們常常在路面上看到的自動(dòng)駕駛車輛很類似,頭頂著激光雷達(dá)?另外所有參賽者的感知套件以及機(jī)構(gòu)都非常類似。

根據(jù)DARPA的規(guī)定,以及提供的路線網(wǎng)絡(luò)定義文件(RNDF)其實(shí)可以認(rèn)為對(duì)于定位,參賽者統(tǒng)一采用其地圖(可以認(rèn)為是高精地圖),定位的技術(shù)方案也是一樣就是利用IMU,GPS還有RTK,可以看到第一名boss的傳感器套件里面有Trimble也就是RTK高精定位供應(yīng)商,目前不少?gòu)S家在用。據(jù)文獻(xiàn)了解當(dāng)時(shí)地圖精度0.1米也就是分米,當(dāng)前商用高精地圖也就是厘米級(jí)別。 對(duì)于感知傳感器方面,可以了解下第一名boss的傳感器套件

1個(gè)最大探測(cè)距離70米的機(jī)械式360度掃射激光雷達(dá)-Velodyne HDL-64 LIDAR (HDL) ,視場(chǎng)角FOV 360 × 26 0.1度角分辨率。
6個(gè)最大探測(cè)距離80米激光雷達(dá)SICK LMS 291-S05/S14 LIDAR (LMS) ,視場(chǎng)角FOV 180/90× 0.9 度,1/0.5角分辨率。用來(lái)識(shí)別道路以及車道線。
2個(gè)探測(cè)距離達(dá)300m的激光雷達(dá) IBEO Alasca XT LIDAR (XT),視場(chǎng)角FOV 240 × 3.2度。
2個(gè)探測(cè)距離達(dá)150m的激光雷達(dá)Continental ISF 172 LIDAR (ISF),視場(chǎng)角FOV 12 × 3.2度。
5個(gè)大陸的Continental ARS 300 Radar (ARS)毫米波雷達(dá),F(xiàn)OV 60/17 × 3.2 度,最大探測(cè)距離60/200米。顯然毫米波雷達(dá)是用來(lái)探測(cè)道路中其他運(yùn)動(dòng)車輛。
2個(gè)高速黑白攝像頭Point Grey Firefly (PGF),視場(chǎng)角為45度。應(yīng)該是用來(lái)識(shí)別道路的車道線。
1個(gè)GPS+IMU高精定位系統(tǒng)Applanix POS-LV 220/420 GPS/IMU (APLX)
其實(shí)查閱資料,基本上完成比賽的6個(gè)車采用相同的傳感器方案,有的差異只是多少個(gè),放的位置罷了。所以這里可以回到文章講到的DARPA挑戰(zhàn)賽的大背景是Strategic computing program戰(zhàn)略計(jì)算計(jì)劃,更多的是挑戰(zhàn)基于計(jì)算,芯片的軟件應(yīng)用。 對(duì)于計(jì)算,第一名Boss使用了一個(gè)帶有10個(gè)2.16-GHz Core2Duo處理器的Compact PCI機(jī)箱,每個(gè)處理器有2 GB內(nèi)存和一對(duì)千兆以太網(wǎng)端口。每臺(tái)計(jì)算機(jī)都從一個(gè)4 GB閃存驅(qū)動(dòng)器啟動(dòng),降低了磁盤故障的可能性。其中兩臺(tái)機(jī)器還安裝了500-GB硬盤用于數(shù)據(jù)記錄。每臺(tái)計(jì)算機(jī)還通過定制的每秒脈沖適配器板進(jìn)行時(shí)間同步。也有用8個(gè)蘋果MAC迷你電腦的。而其他幾家也基本差不多,多個(gè)計(jì)算機(jī)運(yùn)算,整車汽車后備箱塞滿了計(jì)算機(jī),其實(shí)現(xiàn)在自動(dòng)駕駛開發(fā)的工控機(jī)類似了。

對(duì)于軟件方面,基本上以Unix/Linux的系統(tǒng)為自動(dòng)駕駛的運(yùn)行系統(tǒng),在商用系統(tǒng)方面Unix/Linux有著工程師們熟悉的各種庫(kù),接口和算法調(diào)用,來(lái)實(shí)施感知,規(guī)劃,當(dāng)前自動(dòng)駕駛依然一樣。最后是顯示,畢竟還需要操作員和監(jiān)控員,所以顯示基于QT的圖形用戶界面(GUI),為操作員、工程師或測(cè)試人員提供了方便,用于啟動(dòng)和停止軟件、查看狀態(tài)/健康信息以及調(diào)試正在執(zhí)行的各種任務(wù)的工具。
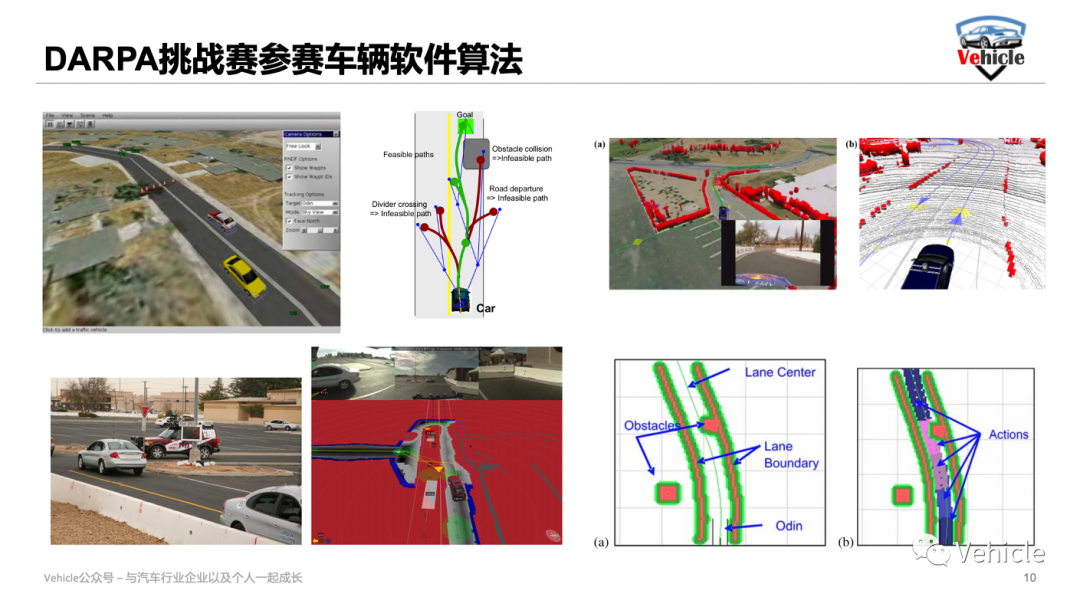
另外通過對(duì)參賽車輛的車身噴涂廣告,可以看到計(jì)算機(jī)的英特爾,我們現(xiàn)在激光雷達(dá)的先驅(qū)ibeo,Velodyne;視覺算法上車的巨頭Moileye,視覺傳感器安森美;電子架構(gòu)專家Vector,汽車?yán)走_(dá)巨頭們等等。 最后盡管DARPA挑戰(zhàn)賽從完成的速度上來(lái)看,離實(shí)際使用尚有距離,但它確實(shí)實(shí)現(xiàn)了一些特定的技術(shù)目標(biāo),例如地面導(dǎo)航的目標(biāo)。特別是卡內(nèi)基梅隆大學(xué)的自主陸地車輛計(jì)劃及其姊妹Navlab項(xiàng)目,為隨后的許多無(wú)人駕駛車輛計(jì)劃奠定了科學(xué)和技術(shù)基礎(chǔ),例如 Demo II 和 III 計(jì)劃(ALV 是演示 I)、感知器和DARPA 大挑戰(zhàn)。SCI ALV 計(jì)劃首創(chuàng)的攝像頭加激光雷達(dá)和IMU慣性導(dǎo)航裝置的使用構(gòu)成了幾乎所有商用無(wú)人駕駛汽車的基礎(chǔ)。它還在相當(dāng)大的程度上幫助推進(jìn)了計(jì)算機(jī)硬件的技術(shù)水平。DARPA挑戰(zhàn)賽對(duì)當(dāng)前自動(dòng)駕駛的影響2007 年 DARPA 城市挑戰(zhàn)表明,無(wú)人駕駛車輛技術(shù)比您想象的更接近。雖然這項(xiàng)技術(shù)存在很多缺陷,但對(duì)于人類司機(jī)來(lái)說也是如此。最終現(xiàn)代汽車自動(dòng)駕駛的技術(shù)基礎(chǔ)奠定了:
感知,基于激光雷達(dá),攝像頭,毫米波雷達(dá)等傳感器的算法環(huán)境感知。
規(guī)劃,通過各類機(jī)器學(xué)習(xí)的算法進(jìn)行路徑,路線的規(guī)劃。
定位,基于GPS,通過RTK,IMU結(jié)合高精地圖(DARPA官方提供的RNDF在線地圖)定位。
執(zhí)行,DARPA的參賽人員花了大量的時(shí)間對(duì)當(dāng)時(shí)基于液壓系統(tǒng)的執(zhí)行架構(gòu)轉(zhuǎn)向,制動(dòng),換擋進(jìn)行電氣化改裝,此項(xiàng)工作當(dāng)時(shí)就篩選了不少人,但當(dāng)代電動(dòng)汽車已經(jīng)全面完全電氣化,所以天然奠定電子化執(zhí)行的基礎(chǔ),也就是當(dāng)前火熱的詞電控底盤概念。

后來(lái)城市挑戰(zhàn)賽中第一名卡內(nèi)基梅隆大學(xué)總結(jié)了,當(dāng)時(shí)自動(dòng)駕駛技術(shù)走向商業(yè)的一些產(chǎn)業(yè)約束有:
商業(yè)激光雷達(dá)相當(dāng)昂貴
雷達(dá)是高檔汽車的選項(xiàng)
攝像頭已經(jīng)被未來(lái)汽車考慮應(yīng)用
計(jì)算單元需要越來(lái)越快,同時(shí)安全運(yùn)行很重要。
所以大家可以看到以上2007年總結(jié)的觀點(diǎn),可以對(duì)應(yīng)到今天,也就是當(dāng)前自動(dòng)駕駛硬件發(fā)展的一些攔路虎或者大家相互競(jìng)爭(zhēng)的點(diǎn)。 激光雷達(dá),在中國(guó)制造產(chǎn)業(yè)的優(yōu)勢(shì)引導(dǎo)下,成本持續(xù)下探。憑借著受光線影響小、高分辨率等特點(diǎn)成為穩(wěn)健、高安全自動(dòng)駕駛必備傳感器。另外其在定位方面的獨(dú)特作用也在各種泊車應(yīng)用場(chǎng)景大放異彩。目前激光雷達(dá)不但“上車了”而且還在“差異化”發(fā)展,例如前向遠(yuǎn)視激光雷達(dá),側(cè)向補(bǔ)盲等。 雷達(dá)也就是普通毫米波雷達(dá)。已經(jīng)在輔助駕駛時(shí)代普及,目前根據(jù)其產(chǎn)業(yè)成本優(yōu)勢(shì),在持續(xù)進(jìn)化朝著4D以及更高精度方向發(fā)展。 而當(dāng)時(shí)剛剛興起的攝像頭,在互聯(lián)網(wǎng)時(shí)代催生的海量圖片以及視頻的大數(shù)據(jù)下,伴隨著視覺人工智能算法迅猛發(fā)展(80年代互聯(lián)網(wǎng)還沒有大批量民用,所以當(dāng)時(shí)美國(guó)戰(zhàn)略計(jì)算計(jì)劃的AI缺少?gòu)V泛參與以及海量數(shù)據(jù)和應(yīng)用基礎(chǔ)),所以攝像頭猶如我之前文章《視覺為王-小鵬以及特斯拉的自動(dòng)駕駛方案》講到越發(fā)重要。 計(jì)算單元,算力TOPs不斷的內(nèi)卷,從個(gè)位數(shù)到幾千的落地,已經(jīng)給汽車電腦也就是Domain域控制器,不僅僅是計(jì)算,還有內(nèi)存、硬盤、通訊、圖像解碼等等芯片帶來(lái)巨大的市場(chǎng)。寫在最后當(dāng)前自動(dòng)駕駛依然還在產(chǎn)業(yè)落地的路途中,而當(dāng)年第一名卡內(nèi)基梅隆大學(xué)總結(jié)的幾個(gè)約束,其實(shí)在當(dāng)代依然存在;而這些約束本質(zhì)上又回到DARPA自動(dòng)駕駛挑戰(zhàn)賽的母計(jì)劃DARPA Strategic computing program(戰(zhàn)略計(jì)算計(jì)劃)先進(jìn)計(jì)算機(jī)硬件和人工智能AI的研究。在自動(dòng)駕駛產(chǎn)業(yè)中,不管是感知用的芯片,計(jì)算用的芯片都屬于此類。 而當(dāng)前地緣政治抬頭下,各家對(duì)于數(shù)據(jù)的地緣化,對(duì)芯片以及各個(gè)產(chǎn)業(yè)的逆全球化,已經(jīng)給自動(dòng)駕駛產(chǎn)業(yè)化帶來(lái)了更大的挑戰(zhàn),這可能也就是當(dāng)前自動(dòng)駕駛產(chǎn)業(yè)寒意濃濃的根本源頭。但這種地緣化的時(shí)代,也同樣是催生驅(qū)動(dòng)技術(shù)的發(fā)展,不過這種發(fā)展是地緣化,個(gè)體化的。例如DARPA開啟于蘇美冷戰(zhàn)時(shí)刻,助力美國(guó)計(jì)算科技崛起,所以冬天是一個(gè)好積蓄的時(shí)間點(diǎn),對(duì)于國(guó)家,企業(yè),個(gè)人都一樣。 作為制造和市場(chǎng)都異常巨大的中國(guó),要贏得智能自動(dòng)駕駛時(shí)代可能還需要在類似美國(guó)的DARPA Strategic computing program(戰(zhàn)略計(jì)算計(jì)劃)上多下功夫。
審核編輯 :李倩
-
算法
+關(guān)注
關(guān)注
23文章
4699瀏覽量
94748 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14201瀏覽量
169544 -
機(jī)器智能
+關(guān)注
關(guān)注
0文章
55瀏覽量
8747
原文標(biāo)題:當(dāng)代自動(dòng)駕駛產(chǎn)業(yè)的起源-DARPA挑戰(zhàn)賽
文章出處:【微信號(hào):阿寶1990,微信公眾號(hào):阿寶1990】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
華為受邀出席第一屆自動(dòng)駕駛產(chǎn)業(yè)發(fā)展論壇
平頭哥半導(dǎo)體亮相AICAS 2025挑戰(zhàn)賽技術(shù)研討會(huì)
EDA精英挑戰(zhàn)賽賽果公布!思爾芯“戰(zhàn)隊(duì)”薪火相承斬獲“麒麟杯”

一文聊聊自動(dòng)駕駛測(cè)試技術(shù)的挑戰(zhàn)與創(chuàng)新

e絡(luò)盟社區(qū)攜手恩智浦發(fā)起智能空間樓宇自動(dòng)化挑戰(zhàn)賽

2024年ICPC與華為挑戰(zhàn)賽冠軍杯圓滿落幕
PI助力aCentauri車隊(duì)在太陽(yáng)能車挑戰(zhàn)賽中大放異彩
50萬(wàn)獎(jiǎng)金池!開放原子大賽——第二屆OpenHarmony創(chuàng)新應(yīng)用挑戰(zhàn)賽正式啟動(dòng)

自動(dòng)駕駛仿真測(cè)試技術(shù)面臨的挑戰(zhàn)#ADAS #智能駕駛 #VTHiL
NVIDIA Research端到端自動(dòng)駕駛模型引領(lǐng)國(guó)際挑戰(zhàn)賽
思爾芯賽題正式發(fā)布,邀你共戰(zhàn)EDA精英挑戰(zhàn)賽!
FPGA在自動(dòng)駕駛領(lǐng)域有哪些優(yōu)勢(shì)?
FPGA在自動(dòng)駕駛領(lǐng)域有哪些應(yīng)用?
自動(dòng)駕駛的傳感器技術(shù)介紹
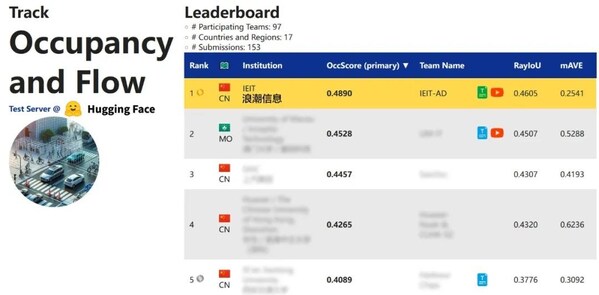
浪潮信息獲CVPR2024自動(dòng)駕駛挑戰(zhàn)賽"Occupancy& Flow"冠軍





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論