 了解I2C Primer、PMBus和SMBus通信協議
了解I2C Primer、PMBus和SMBus通信協議

作者:Mary Grace Legaspi and Eric Peňa
I2C或內部集成電路是建立設備之間通信的常用串行通信協議,特別是對于兩個或多個不同的電路。I2C引物是最常用的 I2C. 本文將提供 I 的基本功能和標準2C 入門,主要用于解決通信實現過程中的正確用法。從我的基本原理2C,我們將介紹其變體子集系統管理總線 (SMBus) 和電源管理總線 (PMBus) 的可用性以及它們的差異。這三者中的每一個都有專門的功能,旨在滿足不同的客戶需求。
為什么它很重要?
I2C語言為設計人員在系統中的眾多節點之間建立簡單、雙向、靈活的通信提供了好處。I2C語言通過僅使用兩條雙向線來發送和接收信息來降低復雜性。它還允許設計人員配置多個主節點系統IC之間的通信。I2C語言還有利于開發人員管理系統和電源,這使他們在最佳時間線內創建高質量產品的優勢。
“溝通對那些從事溝通的人有用。”
——約翰·鮑威爾
通信協議在組織設備之間的通信方面起著重要作用。它根據系統要求以不同的方式設計,這些協議具有特定的、商定的規則來實現成功的通信。
你可能用過I2C如果您曾經構建過帶有 LED 顯示屏、傳感器甚至加速度計模塊的系統,僅舉幾例。I2C支持多個節點連接到單個主設備,多個主設備連接到多個節點的功能。如果您希望最大限度地讓一個微控制器將數據記錄到單個存儲卡或將文本顯示到單個 LCD,則此功能非常有用。
除了最常用的I2C Primer,我還有兩個額外的變體2C,專注于系統和電源應用的用法。這些稱為系統管理總線 (SMBus) 和電源管理總線 (PMBus)。
根據定義,內部集成電路(I2C)(也稱為 Inter IC)是一種硬件通信協議,它使用與多主、多節點和串行通信總線的同步通信。同步通信意味著交換數據的兩個(或多個)設備共享一條公共時鐘線。I2C語言廣泛用于將低速外設 IC 連接到處理器和微控制器。I2C總線由飛利浦設計,允許駐留在同一電路板上的組件之間輕松通信。
我2C 引物
通過使用串行數據 (SDA) 線、串行時鐘 (SCL) 線和用于承載所有通信的公共接地,可以最大限度地減少連接。
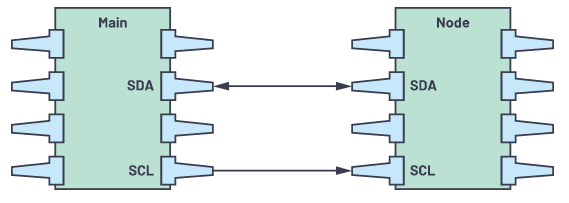
圖1.集成電路直接相互通信。
每根 I 中有兩根電線2C 設備:
SDA是主設備和節點發送和接收數據的線路。
SCL 是傳輸時鐘信號的線路。SCL 始終由 I 生成2C 主。該規范要求時鐘信號的低相位和高相位的最小周期。
I2C總線僅使用兩條雙向線路:每個器件的 SDA 和 SCL,用于簡單的 IC 間通信。
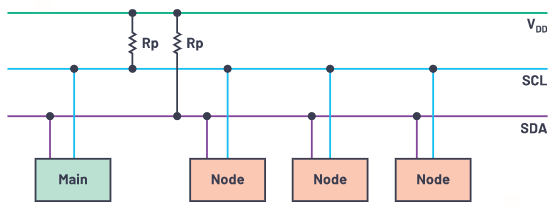
圖2.I2C 上拉電阻連接。
最重要的硬件部件是上拉電阻,由SDA和SCL線路使用。I2C兼容器件通過集電極開路或漏極開路引腳連接到總線,從而將線路拉低。當沒有數據傳輸時,I2C總線線路在高電平狀態下閑置;線條被動拉高。通過切換線路、拉低和釋放高電平來發生傳輸。位在下降的時鐘邊沿上計時。
漏極開路輸出需要一個上拉電阻(圖2中的Rp)才能正確輸出高電平。上拉電阻連接在輸出引腳和輸出電壓(VDD在圖 2) 中,這是高狀態所需的。
四千七百歐姆(4700 Ω)是上拉電阻最常用的值,典型值為V抄送和 VDD(5 V)。
作為參考,屏蔽 2 AWG 雙絞線電纜的電容范圍為 100 pF/m 至 240 pF/m。因此,I 的最大總線長度2C 鏈路在 100 kBaud 時約為 1 米,在 10 kBaud 時約為 10 米。非屏蔽電纜通常具有小得多的電容,但只能在其他屏蔽外殼內使用。
表1總結了I2C.
| 特征 | 規格 |
| 電線 | 2 |
| 最大速度 | 標準模式 = 100 kbps 快速模式 = 400 kbps 高速模式 = 3.4 Mbps 超快模式 = 5 Mbps |
| 同步還是異步? | 同步 |
| 串行還是并行? | 串行 |
| 最大電源數量 | 無限 |
| 最大節點數 | 1008 |
理論上,最大節點數為 27或 210用于尋址模式;但是,有 16 個地址是為特殊目的保留的。
I2C是同步的,因此位的輸出通過主節點和節點之間共享的時鐘信號與位采樣同步。時鐘信號始終由主設備控制。
保留 I2C 節點地址
有 16 個保留 I2C 地址。這些地址對應于兩種模式之一:0000 XXX 或 1111 XXX。表 2 顯示 I2C地址保留用于特殊用途。
| 我2C 節點地址 | R/W | 位說明 |
| 0000 000 | 0 | 一般呼叫地址 |
| 0000 000 | 1 | 起始字節 |
| 0000 001 | X | CBUS地址 |
| 0000 010 | X | 保留用于不同的總線格式 |
| 0000 011 | X | 保留用于將來的目的 |
| 0000 1XX | X | 高速模式主碼 |
| 1111 1XX | X | 保留用于將來的目的 |
| 1111 0XX | X | 10 位節點地址 |
我該怎么做2C 工作?
I2C 數據在消息中傳輸,消息被分解為數據幀。讀寫協議包含具有節點二進制地址的地址幀和另一個數據幀,其中包含正在傳輸的數據、開始和停止條件、重復開始位、讀/寫位以及每個數據幀之間的確認/不確認位。
時序規格表
I2C時序表也很重要,因為它允許工程師設計與總線要求兼容的IC。每個數據速率都有自己的時序規范,主節點和節點必須遵守該規范才能正確傳輸數據。
表3顯示了時序規格表上可用的符號和參數。
| 象征 | 參數 | 單位 |
| f標準及校正實驗所 | 標準與校正實驗所時鐘頻率 | 千 赫 |
| t高清(斯塔) | 保持時間(重復)啟動條件 | 微秒 |
| t低 | 標準及校正實驗所引腳的低周期 | 微秒 |
| t高 | 高周期 SCL 引腳 | 微秒 |
| t蘇(斯塔) | 重復啟動條件的設置時間 | 微秒 |
| t高清(達特) | 數據保持時間 | 微秒 |
| t蘇(嘎嘎) | 數據設置時間 | 納 |
| tr | SDA信號的上升時間 | 納 |
| tf | SDA 信號的下降時間 | 納 |
| t蘇(中) | 停止條件的設置時間 | 微秒 |

圖3.一個I2C消息。
I2C 傳輸子協議
通過總線傳輸是讀取或寫入操作。讀寫協議建立在一系列子協議之上,例如開始和停止條件、重復起始位、地址字節、數據傳輸位和確認/不確認位。
啟動條件
顧名思義,啟動條件總是發生在傳輸開始時,并由主設備啟動。這樣做是為了喚醒總線上的空閑節點設備。在 SCL 線路從高電平切換到低電平之前,SDA 線從高電壓電平切換到低電壓電平。參見圖 4。
重復啟動條件
在不發出停止條件的情況下,可以在傳輸過程中重復啟動條件。這是一種特殊情況,稱為重復啟動,用于改變數據傳輸方向、重復傳輸嘗試、同步多個 IC,甚至控制串行存儲器。參見圖 5。
地址框
地址幀包含 7 位或 10 位序列,具體取決于可用性(請參閱數據手冊)。參見圖 6。
I2C沒有像 SPI 那樣的節點選擇行,因此它需要另一種方式讓節點知道數據正在發送到它,而不是另一個節點。它通過尋址來實現這一點。地址幀始終是新消息中起始位之后的第一幀。
main 將要與之通信的節點的地址發送到與其連接的每個節點。然后,每個節點將從主節點發送的地址與其自己的地址進行比較。如果地址匹配,它將一個低壓ACK位發送回主電源。如果地址不匹配,節點將不執行任何操作,并且 SDA 線路保持高電平。
讀/寫位
地址幀末尾包含一個位,用于通知節點主節點是要向其寫入數據還是從中接收數據。如果主設備要向節點發送數據,則讀/寫位處于低電壓電平。如果主節點從節點請求數據,則位處于高壓電平。參見圖 7。
ACK/NACK 位
消息中的每個幀后跟一個確認/不確認位。如果成功接收到地址幀或數據幀,則接收設備將向發送方返回ACK位。
圖例:對于下圖,白框表示節點,而藍色框表示主節點。參見圖 8。
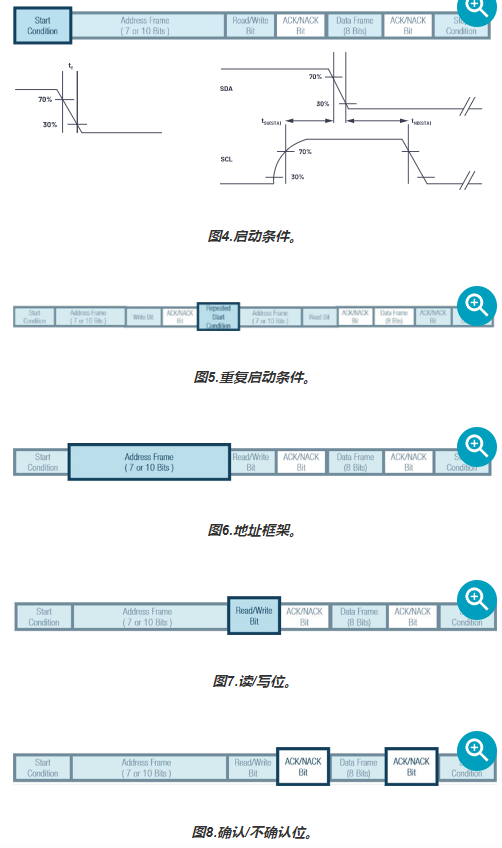
數據框
主節點檢測到來自節點的ACK位后,第一個數據幀就可以發送了。數據幀始終為 8 位長,并以最高有效位優先發送。每個數據幀后面緊跟一個ACK/NACK位,以驗證該幀是否已成功接收。在發送下一個數據幀之前,主節點或節點(取決于發送數據的人)必須接收 ACK 位。參見圖 9。
停止條件
發送完所有數據幀后,主節點可以向節點發送停止條件以停止傳輸。停止條件是在SCL線路上從低到高轉換后,SDA線路上的電壓從低到高轉換,而SCL線路保持高電平。
在 SCL 線路從低電平切換到高電平后,SDA 線從低電壓電平切換到高壓電平。參見圖 10。
I 的步驟2C 傳輸:寫入
舉個例子 I2C傳輸寫入位置的單個位置,見圖11。
步驟 1
主設備通過將SDA線從高壓電平切換到低電壓電平,然后再將SCL線從高電平切換到低電平,將啟動條件發送到每個連接的節點。
步驟 2
主節點向每個節點發送它想要與之通信的節點的 7 位或 10 位地址以及寫入位。
例如,0x2D 7 位地址。添加等效于 0 的寫入位,它將0x5A。
步驟 3
每個節點將從主地址發送到的地址與其自己的地址進行比較。如果地址匹配,節點通過將 SDA 線拉低一位來返回 ACK 位。如果來自主節點的地址與節點自己的地址不匹配,則節點將 SDA 線保留為高電平。
通過在 SCL 的第九個脈沖期間將 SDA 線降低到低電平,對于 NACK,將 SDA 線浮動到高電平,可以實現 ACK。
步驟 4
主發送或接收數據幀。
步驟 5
每個數據幀傳輸完畢后,接收設備向發送方返回另一個ACK位,以確認成功接收該幀。
步驟 6
為了停止數據傳輸,主設備通過在將SDA切換為高電平之前將SCL切換為高電平來向節點發送停止條件。
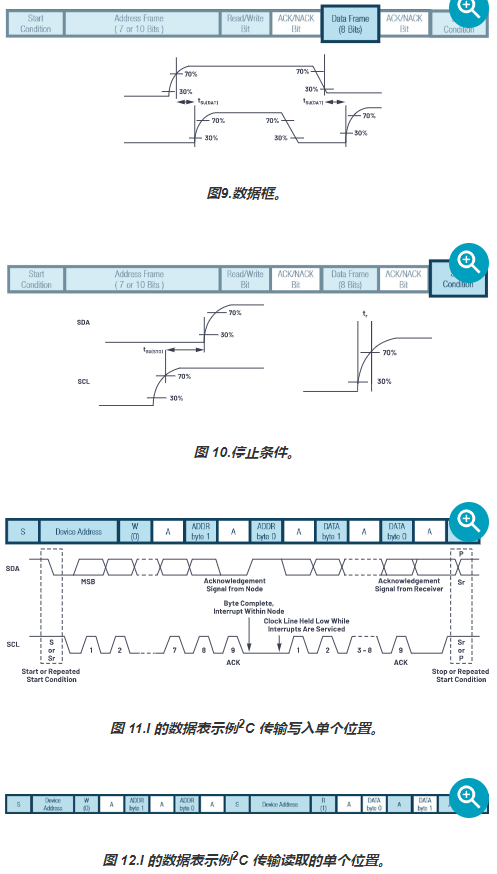
I 的步驟2C 數據傳輸:讀取
步驟 1
主設備通過將SDA線從高壓電平切換到低電壓電平,然后再將SCL線從高電平切換到低電平,將啟動條件發送到每個連接的節點。
步驟 2
主節點向每個節點發送它想要與之通信的節點的 7 位或 10 位地址以及寫入位。
例如,0x2D 7 位地址。添加等效于 0 的寫入位,它將0x5A。
步驟 3
每個節點將從主地址發送到的地址與其自己的地址進行比較。如果地址匹配,節點通過將 SDA 線拉低一位來返回 ACK 位。如果來自主節點的地址與節點自己的地址不匹配,則節點將 SDA 線保留為高電平。
步驟 4
在初始啟動、尋址和確認之后,由于主設備已經知道其節點和要指向的地址,因此某些設備具有重復的啟動條件來清理事務。
注意:僅供閱讀之用!
步驟 5
主節點向每個節點發送它想要與之通信的節點的 7 位或 10 位地址以及讀取位。
例如,0x2D 7 位地址。添加等于 1 的讀取位,它將0x5B。
步驟 6
每個節點將從主地址發送到的地址與其自己的地址進行比較。如果地址匹配,節點通過將 SDA 線拉低一位來返回 ACK 位。如果來自主節點的地址與節點自己的地址不匹配,則節點將 SDA 線保留為高電平。
步驟 7
在ACK位之后,主節點接收來自節點的數據幀。
步驟 8
傳輸完每個數據幀后,主器件向發送方返回另一個 ACK 位以確認成功接收幀,或者如果讀取請求已完成,則主器件返回 NACK。
步驟 9
為了停止數據傳輸,主設備通過在將SDA切換為高電平之前將SCL切換為高電平來向節點發送停止條件。
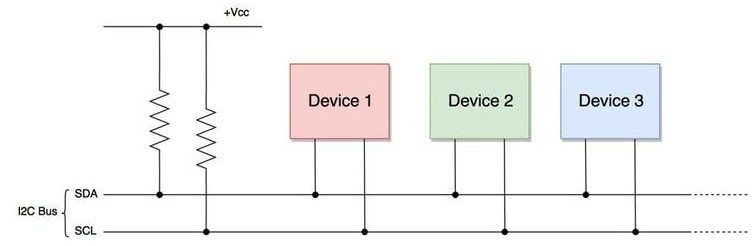
具有多個節點的單個主節點
因為I2C使用尋址,可以從單個主節點控制多個節點。對于 7 位地址,128 (27) 唯一地址可用。使用 10 位地址并不常見,但提供 1024 (210) 唯一地址。要將多個節點連接到單個主電源,請使用 4.7 kΩ 上拉電阻將它們連接到 V抄送.
具有多個節點的多個電源
多個主設備可以連接到單個節點或多個節點。當兩個主設備嘗試通過SDA線路同時發送或接收數據時,同一系統中多個主設備的問題就出現了。
為了解決這個問題,每個主線都需要在傳輸消息之前檢測SDA線路是低還是高。
如果SDA線較低,則意味著另一條主線控制了總線,主線應等待發送消息。如果 SDA 線路很高,則傳輸消息是安全的。要將多個電源連接到多個節點,請使用圖13所示的圖表,使用4.7 kΩ上拉電阻將SDA和SCL線路連接到V抄送.
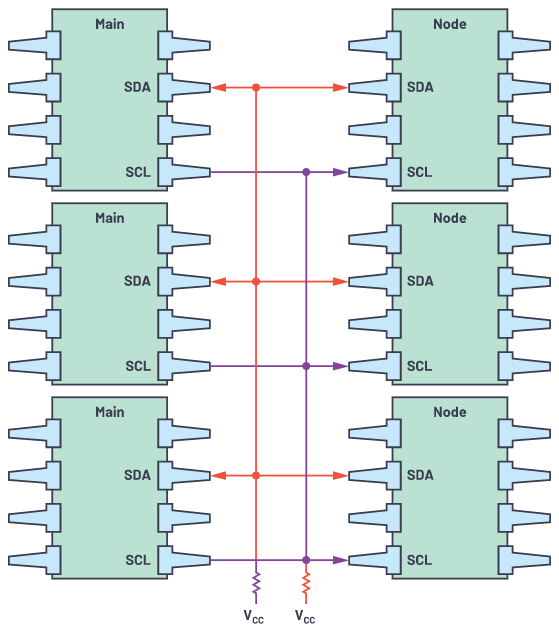
圖 13.連接多個節點的多個電源。
仲裁
幾個I2C多主設備可連接同一I2C 總線并發運行。通過持續監控SDA和SCL的啟動和停止條件,他們可以確定總線當前是否處于空閑狀態。如果總線繁忙,則主設備延遲等待I2C 轉換,直到停止條件指示公共汽車再次空閑。
但是,可能會發生兩個主要設備同時開始傳輸的情況。在傳輸過程中,電源不斷監控SDA和SCL。如果其中一個檢測到SDA在應該高的時候很低,它會假設另一個主干處于活動狀態并立即停止其傳輸。此過程稱為仲裁。兩個電源都生成一個起始位并繼續傳輸。
如果電源碰巧選擇了相同的邏輯電平,則不會發生任何事情。
一旦主電源試圖施加不同的邏輯電平,主電源就會宣布信號低電平,從而宣布獲勝;失敗者檢測到邏輯不匹配并放棄其傳輸。
花點時間欣賞一下這種安排的簡單性和有效性:
獲勝者繼續傳輸而不會中斷 - 沒有損壞的數據,沒有驅動程序爭用,不需要重新啟動事務。
從理論上講,失敗者可以在仲裁過程中監控節點地址,如果它恰好是尋址節點,則做出適當的響應。
如果競爭主線都從同一節點請求數據,仲裁過程不會不必要地中斷任一事務 — 不會檢測到不匹配,并且節點會將其數據輸出到總線,以便多個主線可以接收它。
時鐘拉伸
這也稱為時鐘同步。
注:I2C規范未指定時鐘拉伸的任何超時條件,也就是說,任何設備都可以根據需要按住 SCL。
在I2C通信協議中,時鐘速度和信號始終由主器件產生。由 I 產生的信號2C 主設備提供主節點連接之間的同步。
在某些情況下,節點或子節點未完全工作,需要在從主節點接收生成的時鐘之前放慢速度。這是通過一種稱為時鐘拉伸的機制實現的。
在時鐘拉伸期間,為了降低總線速度,允許節點按住時鐘。在主側,有必要在其高電平狀態之后回讀時鐘信號。然后它必須等到線達到高狀態。
帶寬
雖然時鐘延長是一種常見的做法,但對帶寬方面有影響。在使用時鐘延伸時,共享總線之間的總帶寬可能會顯著降低。即使使用這種技術,總線性能也必須可靠且快速。有必要涵蓋使用時鐘拉伸的估計效果,尤其是在 I2由多個設備共享的C總線。
時鐘拉伸允許 I2C 節點設備強制主設備進入等待狀態。節點設備在需要更多時間來管理數據時(例如,存儲接收的數據或準備傳輸另一個數據字節)時,可能會執行時鐘延伸。這通常發生在節點設備接收并確認一個字節的數據之后。
其中I2C節點設備需要時鐘延長?
是否需要時鐘拉伸取決于節點設備的功能。下面是兩個示例:
處理設備(如微處理器或微控制器)可能需要額外的時間來處理中斷、接收和管理數據以及執行適當的功能。
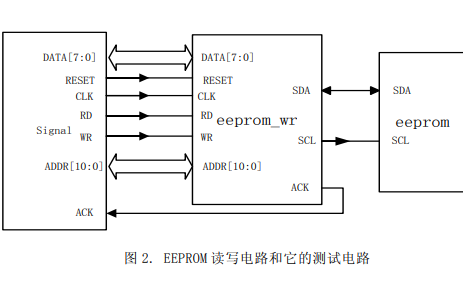
更簡單的設備(如EEPROM)不在內部處理數據,因此不需要時鐘拉伸來執行其任何功能。
I2C數據手冊示例概述
根據不同的公司和制造商,在創建數據表方面有不同的方法。首先,圖13顯示了一個示例數據手冊和基本數據手冊2C 詳細信息,包括寄存器和電子規格。
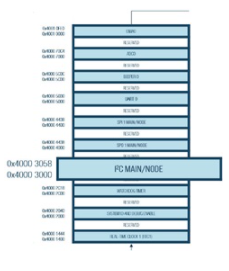
圖 15.微控制器內存圖。
表 4 顯示了最常用的 I2C 寄存器。名稱和描述可能因數據手冊而異,但功能和用法是通用的。
| 名字 | 描述 |
| I2C_ADDR1 | 主地址字節 1 |
| I2C_ADDR2 | 主地址字節 2 |
| I2C_BYT | 起始字節 |
| I2C_ID | 節點地址設備 ID |
| I2C_MCTL | 主控 |
| I2C_MRX | 主接收數據 |
| I2C_SCTL | 節點控制 |
| I2C_SRX | 節點接收 |
| I2C_STAT | 主和節點先進先出狀態 |
我創造2C 可能因使用情況而異。表 5 顯示了基本 I 的樣本2C 驅動程序 API 要求。
| 主要 | 節點 |
|
初始化 |
|
| Tx 處理器 | Tx 處理器 |
| 接收處理器 | 接收處理器 |
|
事件中斷 |
|
|
錯誤中斷 |
|
SMBus
眾所周知,SMBus 用于需要關鍵參數監控的應用。它最常用于計算機主板和嵌入式系統應用。它具有溫度、電源電壓、風扇監視器和/或控制集成芯片的附加監控規范。
SMBus 是一條 2 線總線,類似于 I2飛利浦在1980年代開發的C總線。兩個主要信號是時鐘或SMBCLK和數據或SMBDAT。我2C 引物和 SMBus 相互兼容,但存在顯著差異,例如:
SMBus邏輯電平門限是固定的,與器件的電源電壓不成比例。這允許具有不同電源電壓的器件在同一引物上工作。例如,一個 SMBus 可能具有由 1.8 V、3.3 V 和 5 V 供電的設備。
它們都以高達 100 kHz 的相同速度運行,但 I2C 引物有 400 kHz 和 2 MHz 版本。
SMBus 提供最小時鐘速度,并限制時鐘在一個事務中可能延長的數量。違反超時限制會導致所有 SMBus 設備重置其 I/O 邏輯以允許總線重新啟動。這增強了總線的魯棒性。
兩者的超時也不同。我2C 引物沒有超時,而 SMBus 有超時 — 對于 10 kHz 的最小時鐘速度,請考慮 35 ms。
數據包錯誤檢查 (PEC) 最初是為 SMBus 定義的。在每個事務的末尾添加一個數據包錯誤代碼字節。
剩下的一些差異涉及傳輸類型、警報線、掛起線以及斷電或上電。
SMBus 設備每次收到時都必須確認 (ACK) 自己的地址,這是一項明確要求,無論設備可能正在執行其他操作。這確保了主設備可以準確地確定總線上哪些設備處于活動狀態。
所有 SMBus 事務都通過指定的 SMBus 協議之一執行。
SMBus 包括一個可選信號 SMBALERT#,節點設備可以使用該信號快速通知主主機或系統主機它具有主主機的信息,例如報告故障情況。
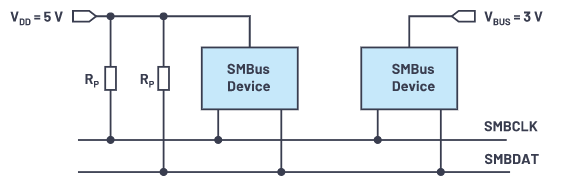
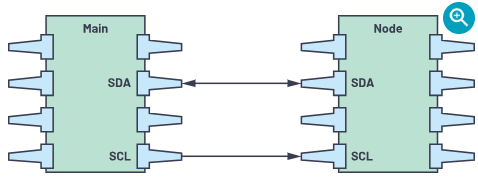
圖 16.SMBus 拓撲。
SMBus 上拉電路
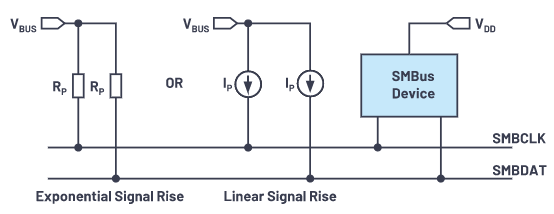
圖 17.SMBus 上拉電路。
中小企業地址
SMBus 地址的長度為 7 個二進制位,通常表示為 4 位,后跟 3 位,后跟字母 b,例如 0001 110b。這些地址占據總線上 8 位字段的高 7 位。但是,此字段的低位具有另一個語義含義,該含義不是 SMBus 地址的一部分。

圖 18.節點地址。
7位目標地址從主設備發送到總線上的一個或多個設備(例如常規呼叫地址)。
請注意,開始和停止條件是轉換,而不是位,并且在符號上方顯示時沒有位計數數字。當顯示在事務圖中時,重復開始也是一個過渡,而不是一個位,并且在符號上方顯示沒有位計數。

圖 19.SMBus 消息。
SMBus 定時測量
| 象征 | 參數 | 單位 |
| f中小企業 | SMBus工作頻率 | 千 赫 |
| t布夫 | 停止和啟動之間的總線空閑時間 | 微秒 |
| T高清-STA | (重復)啟動條件后的保持時間 | 微秒 |
| T蘇斯塔 | 重復啟動條件設置時間 | 微秒 |
| t蘇(中) | 停止條件設置時間 | 微秒 |
| t高清(達特) | 數據保持時間 | 納 |
| t蘇(嘎嘎) | 數據設置時間 | 納 |
| t超時 | 檢測時鐘低超時 | 女士 |
| t低 | 時鐘低周期 | 微秒 |
| t高 | 時鐘高電平周期 | 微秒 |
PMBus:重新定義電源管理
除了SMBus之外,還有一個變體,PMBus,它是一種開放標準的電源管理協議。這種靈活且高度通用的標準允許基于模擬和數字技術的設備之間進行通信,并提供真正的互操作性,這將降低設計復雜性并縮短電源系統設計人員的上市時間。
PMBus 用于具有電源控制和管理組件的電源的數字管理。它具有支持電源管理要求的命令和結構。這意味著我2C primer 和 PMBus 在電氣要求和命令語義上兼容且可互操作。
電源管理中的基本參數之一是監控過壓電平,PMBus 提供了用于設置和讀取它的命令。通過添加到 I 的可用功能2C primer 和 SMBus,PMBus 充當現有標準之上的協議層,尤其是 SMBus。
I2C規范僅描述了 2 線總線的物理層、時序和流量控制。我2C 規范不描述消息的格式(如 SMBus 協議),也不描述消息的內容。
PMBus 規范是一個完整的電源管理協議。它包括如何將位和字節從一個設備獲取到另一個設備(即傳輸);它還描述了一種命令語言,該語言賦予這些位和字節以意義。
尋址
對于冗余系統,一旦電源安裝在系統中,最多有三個信號來設置電源的地址位置:地址 2、地址 1 和地址 0。對于非冗余系統,電源設備地址位置應為 B0h。
硬件
電源中的設備應符合 SMBus 2.0 高功率規范2五DD-基于電源和驅動器(對于 VDD= 3.3 V)。該總線的工作電壓為3.3 V。
電源
電源中的設備應符合 SMBus 2.0 高功率規范2C 基于 VDD 的電源和驅動器(對于 VDD= 3.3 V)。該總線的工作電壓為3.3 V。
引體向上
只有弱上拉電阻應位于電源內部的 SCL 或 SDA 線路上。主上拉電阻由系統提供,可連接到3.3 V或5 V。對于系統設計,主上拉電阻應位于電源外部,并從備用軌獲取電源。
數據速度
電源中的 PMBus 設備應以 100 kbps SMBus 全速運行,并盡可能避免使用時鐘拉伸,因為它會減慢總線速度。
總結
表 8 提供了規格方面的一般視圖和摘要:信號、定時和電氣2C Primer、SMBus(用于高功率和低功率)和 PMBus。
I2C Primer、SMBus 和 PMBus 相關?
SMBus 最初是為了促進電池管理系統而開發的,它使用 I2C硬件,但增加了二級軟件,最終允許設備熱插拔而無需重新啟動系統。PMBus 通過定義一組專門設計用于管理電源轉換器的設備命令來擴展 SMBus,公開設備屬性,例如測量的電壓、電流、溫度等。一般來說,I2C Primer、SMBus 和 PMBus 設備可以共享總線,不會出現任何重大問題。
I2C、SMB、PMB 優勢
僅使用兩根電線
帶交流/不適用鉆頭
眾所周知的協議
支持多個主設備和多個節點
硬件沒有UART那么復雜
廣泛使用的方法
弊
數據傳輸速率比 SPI 慢
數據框的大小限制為 8 位
實現比 SPI 更復雜的硬件
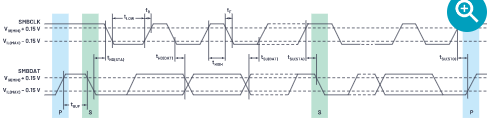
圖 20.SMBus 定時測量。
| 使用的地址 | 主尋址用于大多數具有兩個尋址引腳的服務器電源 | 如果電源上提供了三個尋址引腳,則為其他地址 | ||||||
| 系統尋址地址2/地址1/地址0 | 0/0/0 | 0/0/1 | 0/1/1 | 0/1/1 | 1/0/0 | 1/0/1 | 1/1/0 | 1/1/1 |
| PMBus 設備讀取地址 | B0h/B1h | B2h/B3h | B4小時/B5小時 | B6小時/B7小時 | B8h/B9h | 砰 | BCh/BDh | 貝/貝赫 |
使用案例
傳感器讀數
傳感器寫入
EEPROM,溫度傳感器,觸摸屏,接近
傳輸和控制用戶指示的操作
與多個微控制器通信
消費類電子產品
系統管理
電源管理
調試
| 規范 | 我2C 引物 |
SMBus 高功率| 低功耗 |
PMBus | ||
| 信號 |
數據包錯誤檢查 (可選) SMBALERT (可選) 塊大小限制 |
— — — |
— — 32 字節 |
— — 32 字節 |
— — 255 字節 |
| 定時 |
數據速率: 標準模式 快速模式 快速模式增強版 高速 模式 時鐘 速度 總線超時 總線主請求延遲 (最小值) SCL 保持時間(最大值) 數據保持時間 (最小值) |
100 kbps 400 kbps 1 Mbps 3.4 Mbps 0 Hz 至 3.4 MHz — — — — |
100 kbps — — — — 10 kHz 至 100 kHz 25 毫秒至 35 毫秒 50 μs — 2 毫秒 300 ns |
100 kbps — — — — 10 kHz 至 100 kHz 25 毫秒至 35 毫秒 50 μs — 2 毫秒 300 ns |
100 kbps 400 kbps — — 10 kHz 至 400 kHz 25 毫秒至 35 毫秒 50 微秒 — 2 毫秒 300 納秒 |
| 電氣 |
每總線段電容負載(最大值) 上升時間(最大值) 0.4 V 時的上拉電流(最大值) 每個器件的漏電流(最大值) VIL 輸入邏輯 低閾值(最大值) VIH 輸入邏輯高閾值(最小值) VOL 輸出邏輯 低閾值(最大值) |
400 pF 100 kHz 時為 1 μs,400 kHz 時為 300 ns 3 mA(標準和快速模式) ±10 μA 0.3 VDD或 1.5 V 0.7 V 抄送或 3 V 0.4 V |
400 pF 1 微秒 4毫安 ±10 微安 0.8 V 2.1 V 2.4 V |
— 1 μs 350 μA ±5 μA 0.8 V 2.1 V 0.4 V |
400 pF 100 kHz 時為 1 μs,400 kHz 時為 300 ns 4 毫安 ±10 μA 0.8 V 2.1 V 0.4 V |
-
集成電路
+關注
關注
5425文章
12076瀏覽量
368596 -
電源管理
+關注
關注
117文章
6440瀏覽量
146167 -
I2C
+關注
關注
28文章
1541瀏覽量
127936
發布評論請先 登錄

I2C總線通信協議的相關資料下載
I2C通信協議應該如何學習

Linux控制I2C/SMBus設備

I2C通信協議:了解I2C Primer、 PMBus和SMBus





 工商網監
工商網監
評論