") 電動執(zhí)行器的結(jié)構(gòu)原理和常見故障分析
電動執(zhí)行器的結(jié)構(gòu)原理和常見故障分析
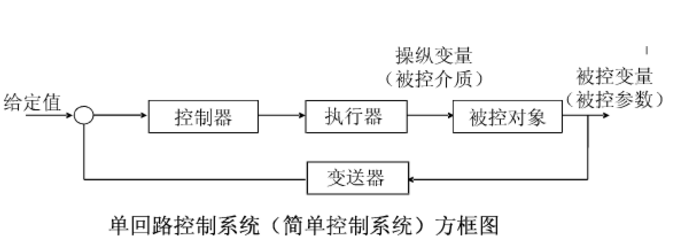
過程控制系統(tǒng)是實現(xiàn)生產(chǎn)過程自動化的平臺,而過程控制儀表及裝置是過程控制系統(tǒng)不可缺少的重要組成部分,一個簡單的自動控制系統(tǒng),由變送器、控制器和執(zhí)行器構(gòu)成了一個單回路控制系統(tǒng)。方框圖如下圖,執(zhí)行器是過程控制系統(tǒng)中的一個重要的組成部分,人們常把執(zhí)行器比喻為生產(chǎn)過程自動化的“手腳”,執(zhí)行器由執(zhí)行機構(gòu)和調(diào)節(jié)機構(gòu)兩個部分組成。簡單介紹執(zhí)行器的種類及特點、執(zhí)行器的作用方式,電動執(zhí)行器工作原理及選用的原則,電動執(zhí)行器的應(yīng)用現(xiàn)狀及發(fā)展趨勢。
一、執(zhí)行器的定義
執(zhí)行器是自動控制系統(tǒng)中的執(zhí)行機構(gòu)和控制閥組合體。它在自動控制系統(tǒng)中的作用是接受來自調(diào)節(jié)器發(fā)出的信號,以其在工藝管路的位置和特性,調(diào)節(jié)工藝介質(zhì)的流量,從而將被空數(shù)控制在生產(chǎn)過程所要求的范圍內(nèi)。
二、執(zhí)行器分類特點
1、分類
(1) 執(zhí)行器按所用驅(qū)動能源分為氣動、電動和液壓執(zhí)行器三種。 (2) 按輸出位移的形式,執(zhí)行器有轉(zhuǎn)角型和直線型兩種。
(3) 按動作規(guī)律,執(zhí)行器可分為開關(guān)型、積分型和比例型三類。
(4) 按輸入控制信號,執(zhí)行器分為可以輸入空氣壓力信號、直流電流信號、電接點通
斷信號、脈沖信號等幾類。
2、優(yōu)點
電動執(zhí)行器的能源取用方便,動作靈敏,信號傳輸速度快,適合于遠(yuǎn)距離的信號傳送,便于與電子計算機配合使用。
3、缺點
電動執(zhí)行器一般不適用與防火防爆的場合,而且結(jié)構(gòu)復(fù)雜,價格貴。
單回路系統(tǒng)控制方框圖
三、結(jié)構(gòu)原理
以MD系列電動執(zhí)行機構(gòu)的整體式比例調(diào)節(jié)型為例。
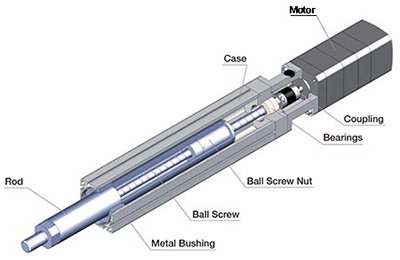
MD系列電動執(zhí)行機構(gòu)以交流伺服電動機為驅(qū)動裝置的位皿伺服機構(gòu),由配接的位置定位器PM-2控制板接受調(diào)節(jié)系統(tǒng)的4~20mA直流控制信號與位置發(fā)送器的位置反饋借號進行比較,比較后的信號偏差經(jīng)過放大使功率級導(dǎo)通,電動機旋轉(zhuǎn)驅(qū)動執(zhí)行機構(gòu)的輸出件朝著減小這一偏差的方向移動(位置發(fā)送器不斷將輸出件的實際位置轉(zhuǎn)變?yōu)殡娦盘枴挥答佇盘査椭廖恢露ㄎ黄鳎钡狡钚盘栃∮谠O(shè)定值為止。此時執(zhí)行機構(gòu)的輸出件就穩(wěn)定在與輸人信號相對應(yīng)的位置上。該系列角行程機構(gòu)示意圖如圖1、直行程機構(gòu)示意圖如圖2所示,其實際使用接線圖如圖3所示。
MD系列角行程調(diào)節(jié)電動執(zhí)行機構(gòu)由動力部件和位置定位器(PM-2控制板)兩大部分組成。其中動力部件主要由電動機、減速器、力矩行程限制器、開關(guān)控制箱、手輪和機械限位裝置以及位置發(fā)送器等組成,其各部分作用簡述如下:
1、電動機:電動機是特種單相或三相交流異步電動機,具有高啟動力矩、低啟動電流和較小的轉(zhuǎn)動慣量,因而有較好的伺服特性。在電動機定子內(nèi)部裝有熱敏開關(guān)(詳見圖3所示)做過熱保護,當(dāng)電動機出現(xiàn)異常過熱(內(nèi)部溫度超過130℃)時該開關(guān)將控制電動機的電路斷開以保護電動機和執(zhí)行機構(gòu),當(dāng)電動機冷卻以后開關(guān)恢復(fù)接通,電路恢復(fù)工作。為了克服慣性惰走,調(diào)節(jié)型電動執(zhí)行機構(gòu)的電動機控制電路均有電制動功能。 2、減速器:角行程執(zhí)行機構(gòu)采用行星減速加渦輪渦桿傳動機構(gòu),既有較高的機械效率,又具有機械自鎖特性。直行程執(zhí)行機構(gòu)的減速器由多轉(zhuǎn)執(zhí)行機構(gòu)減速器配接絲桿螺母傳動裝置組成。
3、力矩行程限制器:它是一個設(shè)置在減速器內(nèi)的標(biāo)準(zhǔn)單元,由過力矩保護機構(gòu)、行程控制機構(gòu)(電氣限位)、位置傳感器及接線端子等組成。
(1)過力矩保護機構(gòu):內(nèi)行星齒輪在傳遞力矩時產(chǎn)生的偏轉(zhuǎn)撥動嵌裝在齒輪外圈的擺桿,擺桿的兩端各裝有一個測力壓縮彈贊作為正、反向力矩的傳感元件,當(dāng)輸出力矩超過設(shè)定限制力矩時,內(nèi)齒輪的偏轉(zhuǎn)使擺桿觸動力炬開關(guān),切斷控制電路使電動機停轉(zhuǎn)。調(diào)整力炬限制彈資的壓縮量即可調(diào)整力炬的限定值。該保護具有記憶功能,對應(yīng)于接線圖中的電器設(shè)備是力矩開關(guān)LEF、LEO。當(dāng)該保護動作以后,在排除機械力矩故障后,執(zhí)行機構(gòu)斷電或信號瞬間反向一下即可恢復(fù)(即記憶解除)正常工作。
(2)行程控制機構(gòu):由凸輪組和微動開關(guān)組成。該凸輪組通過齒輪減速裝殷,與減速器傳動軸相連,通過調(diào)整分別作用于正、反方向微動開關(guān)(即行程限位開關(guān))的凸輪板的位置可限定執(zhí)行機構(gòu)的行程(行程開關(guān)FCO,F(xiàn)CF)。該電氣限位的范圍在出廠時已經(jīng)調(diào)好,一般情況下請勿隨便調(diào)整,以免損壞機構(gòu)。
(3)位置傳感器:采用高精度、長壽命的導(dǎo)電塑料電位器作為位置傳感元件,它與凸輪組同軸連接,整體式比例調(diào)節(jié)型電動執(zhí)行機構(gòu)位置指示信號,是將電位器隨輸出軸行程變化的電阻值送入PM-2控制板的比較放大電路,并由它送出一個4-20mA的DC電流信號用于指示。
4、開關(guān)控制箱:在開關(guān)控制箱內(nèi)裝有PM電子位置定位器。
5、手輪:在故障狀態(tài)和調(diào)試過程中,可通過轉(zhuǎn)動手輪來實現(xiàn)手動就地操作。
6、機械限位裝置:主要用于故障時以及防止手動操作時超過極限位置保護。角行程電動執(zhí)行機構(gòu)的機械限位采用內(nèi)置扇形渦輪限位結(jié)構(gòu),外形體積小,限位可靠;直行程電動執(zhí)行機構(gòu)的機械限位采用內(nèi)置擋塊型限位結(jié)構(gòu),可十分有效地保護閥座、閥桿、閥芯。 位置定位器實質(zhì)上是一個將控制信號與位置反饋信號進行比較并放大以控制電動機開停和旋轉(zhuǎn)方向的多功能大功率放大板,它與執(zhí)行機構(gòu)的動力部件相連以控制執(zhí)行機構(gòu)按系統(tǒng)規(guī)定的狀態(tài)工作。位置定位器主要由比較、邏輯保護、放大驅(qū)動及功率放大等電路組成。控制單相電動機的位置定位器功率放大部分主要由光電禍合過零觸發(fā)固態(tài)繼電器(無觸點電子開關(guān))構(gòu)成。其主體部分示意如圖4所示。需要注意的是“手動一自動”轉(zhuǎn)換開關(guān),該開關(guān)的作用是在沒有外加信號時,與手動調(diào)整電位器P1配合使用,以便觀察或調(diào)試執(zhí)行機構(gòu)。用后一定要將其撥回“自動”位世,以免影響投人系統(tǒng)自動控制。
三、執(zhí)行器常見故障
(1)執(zhí)行機構(gòu)接收控制系統(tǒng)發(fā)出的開關(guān)信號后,電機不轉(zhuǎn)并有嗡嗡聲。
其原因可能是:
1)減速器的行星齒輪部分卡澀、損壞或變形;
2)減速器的斜齒輪傳動部分變形或過度磨損或損壞;
3)減速器的渦輪渦桿或絲桿螺母傳動部分變形損壞、卡澀等; 4)整體機械部分配合不好,不靈活,需調(diào)整加油。
(2)電氣部分故障 結(jié)構(gòu)原理
1)電動執(zhí)行機構(gòu)接受控制系統(tǒng)發(fā)出的開、關(guān)信號后,電機不轉(zhuǎn),也無嗡嗡聲。可能原因是:沒有交流電源或電源不能加到執(zhí)行機構(gòu)的電機部分或位置定位器部分;PM放大板工作不正常,不能發(fā)出對應(yīng)的控制信號;固態(tài)繼電器部分損壞,不能將放大板送來的弱信號轉(zhuǎn)變成電機需要的強電信號;電機熱保護開關(guān)損壞;力矩限制開關(guān)損壞;行程限制開關(guān)損壞;手動/自動開關(guān)位置選錯或開關(guān)損壞;電機損壞。
2)電動執(zhí)行機構(gòu)接受控制系統(tǒng)發(fā)出的開、關(guān)信號后,電機不轉(zhuǎn),有嗡嗡聲。其可能原因是:電機的啟動電容損壞;電機線圈匝間輕微短路;電源電壓不夠。
3)電動執(zhí)行機構(gòu)接受控制系統(tǒng)發(fā)出的開、關(guān)信號后,電機抖動,并伴有咯咯聲,其原因可能是:PM放大板的輸出信號不足不能使固態(tài)繼電器完全導(dǎo)通,造成電機的加載電壓不足;固態(tài)繼電器性能變壞,造成其輸出端未完全導(dǎo)通。
(3)電動執(zhí)行機構(gòu)接受控制系統(tǒng)發(fā)出的開、關(guān)信號后,電機能正常轉(zhuǎn)動,但沒有閥位反饋。
其可能原因是:
1)位置傳感器的電位器與行程控制機構(gòu)不能同軸旋轉(zhuǎn),需檢查連接部分是否損壞;
2)電位器損壞或性能變壞,阻值不隨轉(zhuǎn)動而發(fā)生變化;
3)位置傳感器的電位器及放大板間連接導(dǎo)線是否正常;
4)PM放大板是否損壞,有無反饋信號送出。
(4)電動執(zhí)行機構(gòu)接受控制系統(tǒng)發(fā)出的開、關(guān)信號后,電機能正常轉(zhuǎn)動,但閥位反饋始終為一固定值,不隨閥門的開、關(guān)而變化,
其可能原因是:
1)導(dǎo)電塑料電位器的阻值為一恒值,不隨轉(zhuǎn)動而變,檢修更換電位器;
2)放大板中有關(guān)部分異常,檢查處理。
審核編輯:郭婷
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6665瀏覽量
110923 -
變送器
+關(guān)注
關(guān)注
14文章
1398瀏覽量
91316 -
執(zhí)行器
+關(guān)注
關(guān)注
5文章
379瀏覽量
19434
原文標(biāo)題:知識||談?wù)勲妱訄?zhí)行器
文章出處:【微信號:儀表之家,微信公眾號:儀表之家】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論