 永磁同步電機模型預測轉矩控制學習
永磁同步電機模型預測轉矩控制學習

導讀:本期主要學習介紹模型預測控制(MPC, Model Predictive Control),主要分為四個部分,MPC基本原理、MPTC控制原理、仿真搭建和結果分析。
一、引言
模型預測控制( MPC) 又稱為滾動時域控制( RHC) ,產生于20 世紀70 年代末,是一種從工業過程控制中產生的新型控制算法,實用性較強,并在實際應用中得到不斷的發展和完善,廣泛應用于電力、汽車、化工、航天、能源等領域。
一般工業過程中存在多變量耦合、非線性以及不確定性等問題,很難建立準確的模型。因此,采用經典PID 控制器或者是一些傳統的控制算法所得到的效果并不理想,存在一定的局限性。MPC 最突出的特點是“邊走邊優化”,且對模型的精確性要求較低,因此能夠有效地用于復雜對象的控制。
模型預測控制應用于電氣傳動系統中時,可分為連續控制集模型預測控制( CCS-MPC)和有限控制集模型預測控制 ( FCS-MPC) 。兩者的主要區別: ( 1) 優化方式不同。CCS-MPC利用數學工具對價值函數求最優解得到最優控制量; 而FCS-MPC 利用變換器的離散性和有限性,遍歷電壓矢量,價值函數最小的電壓矢量即最優控制量。( 2) 作用方式不同。CCS-MPC 中控制量是通過脈沖寬度調制( PWM) 方式作用于系統; 而FCS-MPC 中控制量直接作用于系統。與CCS-MPC相比,FCS-MPC 將目標優化和開關狀態決策過程優化成一步,且具有概念簡單、適用范圍廣、約束和非線性易納入價值函數等優點,因此成為了近年來的研究熱點之一。
二、MPC基本原理
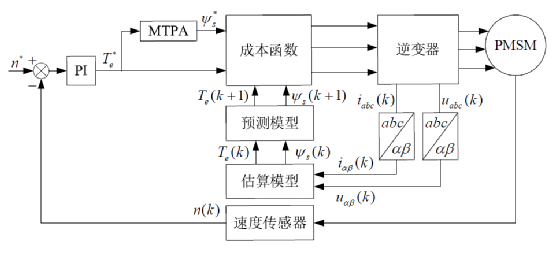
圖1 模型預測轉矩控制框圖
由圖1可以看出,MPTC 策略主要由有限控制集、電機預測模型、定子磁鏈觀測器和價值函數組成。其中,有限控制集是包含所有的備選開關狀態的集合,兩電平逆變器的有限控制集包含8種開關狀態。
在 MPTC 系統中,通常選取轉矩誤差和磁鏈誤差進行成本函數設計:

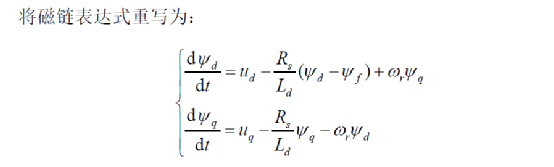
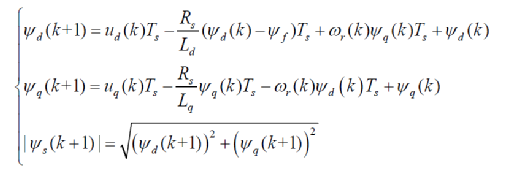
由于電機機械時間常數較大,且系統控制周期很短,因此可以認為在一個控制周期中電機轉子角速度Wr沒有發生變化。使用歐拉法對上式進行計算可以得到磁鏈預測方程:
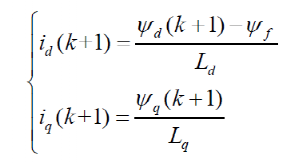
根據上式磁鏈預測公式,再結合電流與磁鏈之間的關系,得到預測電流公式:
綜上可以獲得電機的轉矩預測方程,得到:
三、模型搭建
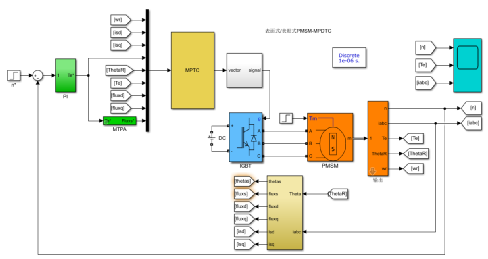
圖2 異步電機模型預測轉矩控制系統仿真
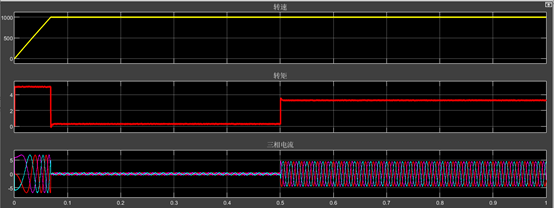
圖3仿真波形變化情況
由圖3電機仿真波形的變化情況中可以說明搭建的模型預測轉矩控制的有效性。
審核編輯:湯梓紅
-
永磁同步電機
+關注
關注
28文章
877瀏覽量
50489 -
MPC
+關注
關注
2文章
36瀏覽量
21452 -
模型預測控制
+關注
關注
1文章
8瀏覽量
2734
原文標題:永磁同步電機模型預測轉矩控制學習
文章出處:【微信號:淺談電機控制,微信公眾號:淺談電機控制】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
永磁同步電機模型預測控制Simulink仿真教程資料下載
永磁同步電機轉矩解析模
永磁同步電機控制筆記-2






 工商網監
工商網監
評論