") 介紹導(dǎo)航坐標(biāo)系與載體坐標(biāo)系之間的姿態(tài)旋轉(zhuǎn)矩陣
介紹導(dǎo)航坐標(biāo)系與載體坐標(biāo)系之間的姿態(tài)旋轉(zhuǎn)矩陣
01
說(shuō)在前面的話
在 MEMS 慣性傳感器06 - 再說(shuō)坐標(biāo)系定義(導(dǎo)航坐標(biāo)系與載體坐標(biāo)系)這篇章中,在介紹導(dǎo)航坐標(biāo)系與載體坐標(biāo)系之間的姿態(tài)旋轉(zhuǎn)矩陣使用的是用歐拉角表示旋轉(zhuǎn)矩陣。
我們知道用來(lái)表示姿態(tài)的方法有: 1)歐拉角 2)方向余弦矩陣 3)四元數(shù) 4)等效旋轉(zhuǎn)矢量。 本篇我們介紹采用四元數(shù)表示姿態(tài)矩陣。 以下內(nèi)容摘抄 《慣性導(dǎo)航》- 秦永元 姿態(tài)更新計(jì)算的四元數(shù)算法章節(jié)。
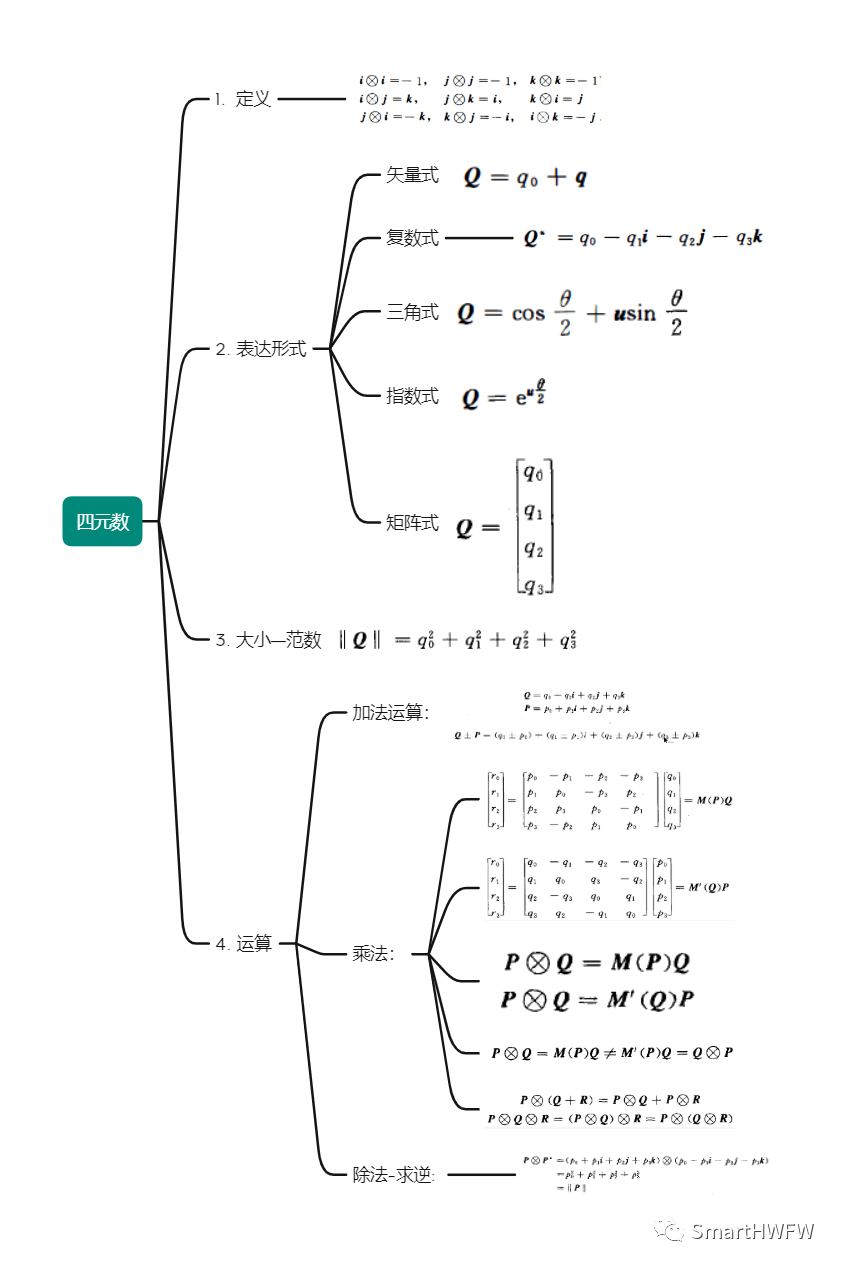
關(guān)于四元數(shù)的介紹和運(yùn)算規(guī)則可以看前期文章。這里簡(jiǎn)單的匯總一下:
02
四元數(shù)表示矩陣
三維空間的任意旋轉(zhuǎn),都可以用繞三維空間的某個(gè)軸旋轉(zhuǎn)過(guò)某個(gè)角度來(lái)表示(即軸角,Axis-Angle表示方法)。這種表示方法里,Axis可用一個(gè)三維向量(x,y,z)來(lái)表示,θ可以用一個(gè)角度值來(lái)表示,直觀來(lái)講,一個(gè)四維向量(θ,x,y,z)就可以表示出三維空間任意的旋轉(zhuǎn)。
注意,這里的三維向量(x, y, z)只是用來(lái)表示axis的方向朝向,因此更緊湊的表示方式是用一個(gè)單位向量來(lái)表示方向axis,而用該三維向量的長(zhǎng)度來(lái)表示角度值θ。這樣,可以用一個(gè)三維向量(θx, θy, θ*z)就可以表示出三維空間任意的旋轉(zhuǎn),前提是其中(x,y,z)是單位向量。這就是旋轉(zhuǎn)向量(Rotation Vector)的表示方式。
Axis-Angle的表示方法還可以推導(dǎo)出另一種很常用的三維旋轉(zhuǎn)表示方法,叫四元數(shù)(Quaternion)。同上,假設(shè)(x, y, z)是axis方向的單位向量,θ是繞axis轉(zhuǎn)過(guò)的角度,那么四元數(shù)可以表示為 [cos(θ/2), xsin(θ/2), ysin(θ/2), z*sin(θ/2)]。
注意,這里可以推導(dǎo)出,用于表示旋轉(zhuǎn)的四元數(shù)向量也必須是單位向量。四元數(shù)的神奇之處在于,對(duì)于三維坐標(biāo)的旋轉(zhuǎn),可以通過(guò)四元數(shù)乘法直接操作,與上述旋轉(zhuǎn)矩陣操作可以等價(jià),但是表示方式更加緊湊,計(jì)算量也可以小一些。捷聯(lián)慣導(dǎo)中的姿態(tài)更新實(shí)質(zhì)上是如何計(jì)算四元數(shù)Q。


審核編輯:劉清
-
MEMS慣性傳感器
+關(guān)注
關(guān)注
1文章
18瀏覽量
7650
原文標(biāo)題:MEMS 慣性傳感器07 - 四元數(shù)表示姿態(tài)矩陣
文章出處:【微信號(hào):SmartHWFW,微信公眾號(hào):SmartHWFW】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
坐標(biāo)系與ROI同步旋轉(zhuǎn)問(wèn)題
請(qǐng)問(wèn)陀螺儀測(cè)得的角頻率是導(dǎo)航參考坐標(biāo)系的嗎?
坐標(biāo)系轉(zhuǎn)換與手眼標(biāo)定
如何更改mpu6050的DMP使坐標(biāo)系跟原坐標(biāo)系一致?
介紹坐標(biāo)系和機(jī)器人之間的紐帶即連桿坐標(biāo)系
同步旋轉(zhuǎn)坐標(biāo)系下的數(shù)學(xué)模型
OPENGL坐標(biāo)系介紹 世界坐標(biāo)系和當(dāng)前繪圖坐標(biāo)系區(qū)別

相機(jī)標(biāo)定之四個(gè)坐標(biāo)系之間的變換關(guān)系
自動(dòng)駕駛各個(gè)坐標(biāo)系

自動(dòng)駕駛中的各種時(shí)空坐標(biāo)系
三坐標(biāo)如何建立坐標(biāo)系?

世界坐標(biāo)系、相機(jī)坐標(biāo)系、圖像坐標(biāo)系、像素坐標(biāo)系之間的關(guān)系

深度剖析機(jī)器人的四大坐標(biāo)系

應(yīng)用衛(wèi)星通信領(lǐng)域的一個(gè)坐標(biāo)轉(zhuǎn)換過(guò)程—機(jī)體坐標(biāo)系與ENU坐標(biāo)系的轉(zhuǎn)換






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論