") 加速度計(jì)和陀螺儀傳感器:操作、傳感和應(yīng)用
加速度計(jì)和陀螺儀傳感器:操作、傳感和應(yīng)用

消費(fèi)電子產(chǎn)品中的微機(jī)電系統(tǒng)(MEMS)每年都在增長(zhǎng),移動(dòng)市場(chǎng)的需求也在增加,這主導(dǎo)了這項(xiàng)新興技術(shù)的增長(zhǎng)。事實(shí)上,MEMS傳感器正在成為為游戲機(jī)、智能手機(jī)和平板電腦等消費(fèi)和移動(dòng)市場(chǎng)設(shè)計(jì)差異化產(chǎn)品的關(guān)鍵要素。MEMS為用戶提供了一種與智能設(shè)備接口的新方式。本文概述了MEMS:其工作原理,傳感機(jī)制以及各種潛在應(yīng)用。
微機(jī)電系統(tǒng)(MEMS)將機(jī)械和電氣組件組合成微米級(jí)的小型結(jié)構(gòu)。它們由半導(dǎo)體和微細(xì)加工技術(shù)的組合形成,使用微機(jī)械加工將所有電子、傳感器和機(jī)械元件集成到一個(gè)共同的硅基板上。任何MEMS系統(tǒng)中的主要組件都是機(jī)械元件、傳感機(jī)制以及ASIC或微控制器。本文概述了MEMS加速度計(jì)傳感器和陀螺儀。我們討論了它們的工作原理、傳感機(jī)制、它們?nèi)找娑鄻踊膽?yīng)用,以及它們已經(jīng)對(duì)我們?nèi)粘I町a(chǎn)生的深遠(yuǎn)影響。
MEMS作為慣性傳感器
MEMS 傳感器在測(cè)量沿一個(gè)或多個(gè)軸的線性加速度或圍繞一個(gè)或多個(gè)軸的角運(yùn)動(dòng)作為控制系統(tǒng)的輸入方面有許多應(yīng)用(圖 1)。
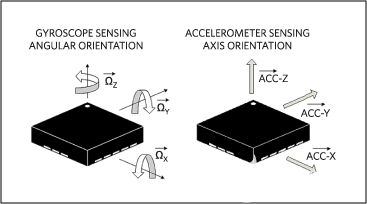
圖1.角運(yùn)動(dòng)與線性運(yùn)動(dòng)。
所有MEMS加速度計(jì)傳感器通常使用位置測(cè)量接口電路測(cè)量質(zhì)量的位移。然后,該測(cè)量值通過(guò)模數(shù)轉(zhuǎn)換器(ADC)轉(zhuǎn)換為數(shù)字電信號(hào),以進(jìn)行數(shù)字處理。然而,陀螺儀測(cè)量共振質(zhì)量的位移及其框架,因?yàn)榭评飱W利加速度。
加速度計(jì)基本操作
牛頓第二運(yùn)動(dòng)定律說(shuō)加速度(m/s2)與作用在物體上的凈力(牛頓)成正比,并且方向相同,并且與其質(zhì)量(克)成反比。
加速度 = 力 (牛頓) (米/秒)
2) 質(zhì)量(克)
重要的是要注意,加速度會(huì)產(chǎn)生由加速度計(jì)的力檢測(cè)機(jī)制捕獲的力。因此,加速度計(jì)真正測(cè)量的是力,而不是加速度;它基本上通過(guò)施加在加速度計(jì)軸之一上的力間接測(cè)量加速度。
加速度計(jì)也是一種機(jī)電設(shè)備,包括孔、空腔、彈簧和通道,使用微細(xì)加工技術(shù)進(jìn)行加工。加速度計(jì)采用多層晶圓工藝制造,通過(guò)檢測(cè)質(zhì)量相對(duì)于固定電極的位移來(lái)測(cè)量加速度。
加速度計(jì)的傳感機(jī)制
加速度計(jì)中常用的檢測(cè)方法是電容檢測(cè),其中加速度與移動(dòng)質(zhì)量的電容變化有關(guān)(圖 2)。這種傳感技術(shù)以其高精度、穩(wěn)定性、低功耗和簡(jiǎn)單的結(jié)構(gòu)而聞名。它不易產(chǎn)生噪音和隨溫度變化。電容式加速度計(jì)的帶寬只有幾百赫茲,因?yàn)樗鼈兊奈锢韼缀涡螤睿◤椈桑┖捅焕г贗C內(nèi)部的空氣充當(dāng)阻尼器。
C = (ε0× εr× A)/D(法拉)
ε0= 允許的可用空間
εr= 板之間允許的相對(duì)材料
A = 電極之間的重疊面積
D = 電極之間的間隔
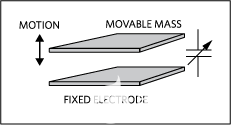
圖2.移動(dòng)質(zhì)量和電容。
電容可以布置為單側(cè)或差分對(duì)。讓我們看一下排列為差分對(duì)的加速度計(jì)(圖 3)。它由單個(gè)可移動(dòng)質(zhì)量(一個(gè)平面)組成,該質(zhì)量與機(jī)械彈簧一起放置在兩個(gè)固定的參考硅基板或電極(另一個(gè)平面)之間。很明顯,質(zhì)量的運(yùn)動(dòng)(運(yùn)動(dòng)x)是相對(duì)于固定電極(d1和d2)的,并導(dǎo)致電容(C1和C2)的變化。通過(guò)計(jì)算C2和C1之間的差異,我們可以得出質(zhì)量的位移及其方向。
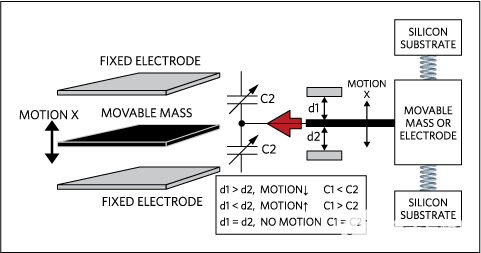
圖3.與單個(gè)移動(dòng)質(zhì)量相關(guān)的加速度。
可移動(dòng)質(zhì)量(微米)的位移是由加速度引起的,它會(huì)產(chǎn)生極小的電容變化,以便正確檢測(cè)(公式1)。這要求使用多個(gè)可移動(dòng)和固定電極,所有電極都以并聯(lián)配置連接。該配置可實(shí)現(xiàn)更大的電容變化,既可以更準(zhǔn)確地檢測(cè),又最終使電容檢測(cè)成為一種更可行的技術(shù)。
讓我們快速總結(jié)一下。力會(huì)導(dǎo)致質(zhì)量位移,進(jìn)而引起電容變化。現(xiàn)在,并聯(lián)放置多個(gè)電極可以實(shí)現(xiàn)更大的電容,這將更容易被檢測(cè)到(圖 4)。V1 和 V2 是電容器兩側(cè)的電氣連接,形成一個(gè)分壓器,中心點(diǎn)作為我們質(zhì)量的電壓。
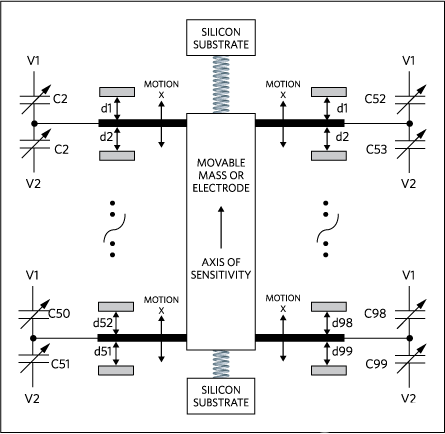
圖4.與多個(gè)移動(dòng)質(zhì)量相關(guān)的加速度。
模擬質(zhì)量電壓將經(jīng)過(guò)電荷放大、信號(hào)調(diào)理、解調(diào)和低通濾波,然后使用Σ-Δ ADC轉(zhuǎn)換為數(shù)字域。然后,來(lái)自ADC的串行數(shù)字位流被傳遞到FIFO緩沖器,該緩沖器將串行信號(hào)轉(zhuǎn)換為并行數(shù)據(jù)流。然后可以使用串行協(xié)議(如 I)轉(zhuǎn)換該并行數(shù)據(jù)流2C 或 SPI,然后再發(fā)送到主機(jī)進(jìn)行進(jìn)一步處理(圖 5)。
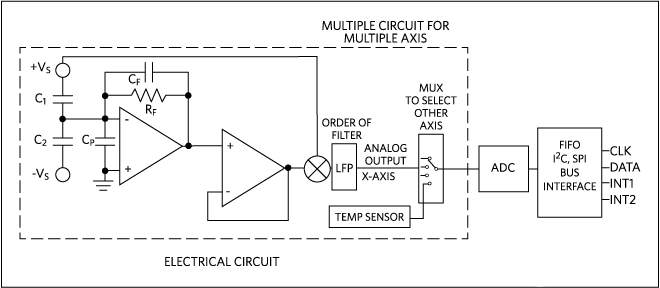
圖5.加速度計(jì)的電路。
Σ-Δ型ADC具有低信號(hào)帶寬和高分辨率,非常適合加速度計(jì)應(yīng)用。Σ-Δ ADC的輸出值由位數(shù)定義,因此可以非常輕松地轉(zhuǎn)換為加速度計(jì)應(yīng)用的“g”單位。“g”是等于地球在海平面重力的加速度單位:
例如,如果我們的 10 位 ADC 的 X 軸讀數(shù)等于可用 1023 (210- 1 = 1023),以3.3V為基準(zhǔn),我們可以使用以下公式得出“g”中指定的X軸的電壓:
X - 電壓 = (600 × 3.3)/1023 = 1.94V
每個(gè)加速度計(jì)都有一個(gè)零g電壓電平,即對(duì)應(yīng)于0g的電壓。我們首先計(jì)算零g電壓(數(shù)據(jù)手冊(cè)中指定,假設(shè)為1.65V)的電壓偏移:
1.94V - 1.65V = 0.29V
現(xiàn)在,為了進(jìn)行最終轉(zhuǎn)換,我們將0.29V除以加速度計(jì)的靈敏度(在數(shù)據(jù)手冊(cè)中指定,假設(shè)為0.475V/g):
0.29V/0.475V/g = 0.6g
多軸加速度計(jì)
讓我們?cè)倏匆幌聢D3,并添加一個(gè)實(shí)際制造的加速度計(jì)(圖6)。現(xiàn)在,我們可以清楚地將加速度計(jì)的每個(gè)組件與其機(jī)械模型相關(guān)聯(lián)。
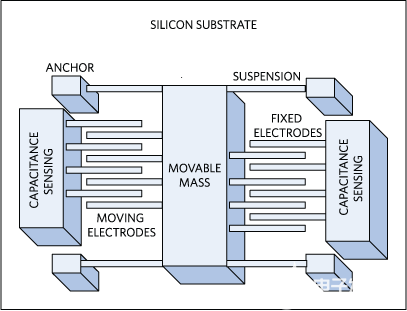
圖6.實(shí)際加速度計(jì)的機(jī)械模型。
通過(guò)簡(jiǎn)單地以不同的方式安裝加速度計(jì)(90度,如圖7所示),我們可以創(chuàng)建一個(gè)更復(fù)雜的應(yīng)用所需的2軸加速度計(jì)。
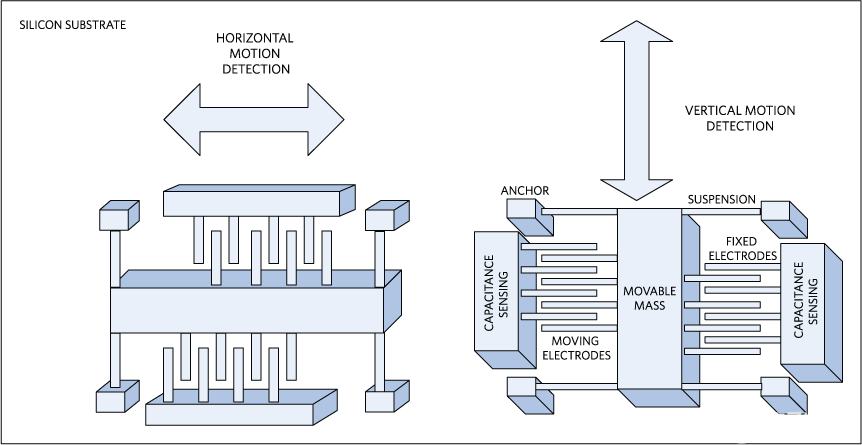
圖7.2 軸加速度計(jì)。
構(gòu)建兩軸加速度計(jì)有兩種方法:將兩個(gè)不同的單軸加速度計(jì)傳感器垂直布置,或者使用單個(gè)質(zhì)量與電容傳感器一起布置來(lái)測(cè)量沿兩個(gè)軸的運(yùn)動(dòng)。
選擇加速度計(jì)
在為給定應(yīng)用選擇加速度計(jì)時(shí),重要的是要考慮其一些關(guān)鍵特性:
帶寬(Hz):傳感器的帶寬表示加速度計(jì)響應(yīng)的振動(dòng)頻率范圍或獲取可靠讀數(shù)的頻率。人類不能創(chuàng)造超出 10Hz 到 12Hz 范圍的身體運(yùn)動(dòng)。因此,40Hz至60Hz的帶寬足以感測(cè)傾斜或人體運(yùn)動(dòng)。
靈敏度(mV/g 或 LSB/g):靈敏度是最小可檢測(cè)信號(hào)或輸出電信號(hào)隨輸入機(jī)械變化而變化的量度。這僅在一個(gè)頻率下有效。
電壓噪聲密度(μg/SQRT Hz):電壓噪聲隨帶寬的平方根反比而變化。我們讀取加速度計(jì)變化的速度越快,我們得到的精度就越差。當(dāng)在較低g條件下工作且輸出信號(hào)較小時(shí),噪聲對(duì)加速度計(jì)的性能有較大影響。
零g電壓:該術(shù)語(yǔ)指定在0g加速度下輸出端可以預(yù)期的電壓范圍。
頻率響應(yīng)(Hz):這是用公差帶(±5%等)指定的頻率范圍,傳感器將檢測(cè)運(yùn)動(dòng)并報(bào)告真實(shí)輸出。指定的頻帶容差允許用戶計(jì)算器件在其指定頻率范圍內(nèi)的任何頻率下與基準(zhǔn)靈敏度的偏差程度。
動(dòng)態(tài)范圍(g):這是加速度計(jì)在失真或削波輸出信號(hào)之前可以測(cè)量的最小可檢測(cè)幅度與最大幅度之間的范圍。
加速度計(jì)與陀螺儀
在描述一些MEMS應(yīng)用之前,我們必須了解加速度計(jì)和陀螺儀之間的區(qū)別。加速度計(jì)測(cè)量沿一個(gè)或多個(gè)軸的線性加速度(以 mV/g 為單位)。陀螺儀測(cè)量角速度(以 mV/deg/s 為單位)。如果我們拿起加速度計(jì)并對(duì)其施加旋轉(zhuǎn)(即滾動(dòng))(圖 8),則距離 d1 和 d2 不會(huì)改變。因此,加速度計(jì)的輸出不會(huì)響應(yīng)角速度的變化。
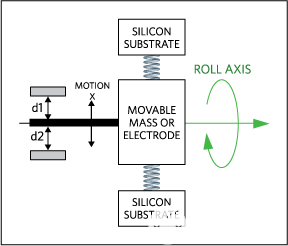
圖8.加速度計(jì)對(duì)旋轉(zhuǎn)的免疫力。
我們可以以不同的方式構(gòu)建傳感器,因此包含共振質(zhì)量的內(nèi)部框架通過(guò)彈簧相對(duì)于共振運(yùn)動(dòng)成 90 度連接到基板(圖 9)。然后,我們可以通過(guò)安裝在內(nèi)框和基板之間的電極上的電容感應(yīng)來(lái)測(cè)量科里奧利加速度。
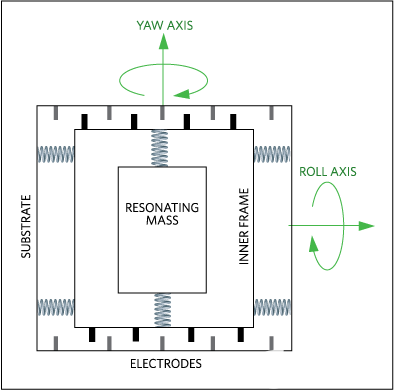
圖9.相對(duì)于移動(dòng)質(zhì)量的內(nèi)部和基板表示。
加速度計(jì)和陀螺儀應(yīng)用
加速度計(jì)在汽車(chē)中已經(jīng)使用了很長(zhǎng)時(shí)間,用于檢測(cè)車(chē)禍并在適當(dāng)?shù)臅r(shí)候觸發(fā)安全氣囊。它們?cè)谝苿?dòng)設(shè)備中有許多應(yīng)用,例如在縱向和橫向模式之間切換,點(diǎn)擊手勢(shì)以切換到下一首歌曲,當(dāng)設(shè)備放在口袋中時(shí)點(diǎn)擊衣服,或防模糊捕獲和光學(xué)圖像穩(wěn)定。
室內(nèi)導(dǎo)航
加速度是速度的變化率
α = δv/δ t = δ2X/δt2
我們可以分別通過(guò)單積分或雙積分從加速度輸出中推導(dǎo)出速度和距離信息。通過(guò)添加陀螺儀提供的測(cè)量值,我們可以使用一種特殊技術(shù)來(lái)跟蹤物體相對(duì)于已知起點(diǎn)的位置和方向。此信息用于室內(nèi)導(dǎo)航,無(wú)需外部參考或 GPS 信號(hào)。
光學(xué)圖像穩(wěn)定
人的手以非常低的頻率(10Hz至20Hz)顫抖。使用我們最新的小巧輕便的智能手機(jī)和相機(jī)拍照時(shí),我們會(huì)產(chǎn)生抖動(dòng),使圖像模糊。光學(xué)變焦等功能加劇了這個(gè)問(wèn)題,并產(chǎn)生了更多的模糊。
當(dāng)使用具有 800x600 像素分辨率的 SVGA 相機(jī)以獲得 45 度視角時(shí),請(qǐng)考慮水平漂移為 0.08 度的傳感器。45/800 = 0.056 度,對(duì)應(yīng)于 1.42 像素模糊。隨著相機(jī)分辨率的提高,模糊會(huì)覆蓋更多的像素并導(dǎo)致更多的圖像失真。
帶有校正軟件的基于陀螺儀的光學(xué)圖像穩(wěn)定可以通過(guò)將機(jī)械陀螺儀的測(cè)量數(shù)據(jù)發(fā)送到微控制器和線性電機(jī)以移動(dòng)圖像傳感器來(lái)補(bǔ)償圖像模糊。
基于手勢(shì)的控制
我們可以使用MEMS加速度計(jì)傳感器對(duì)無(wú)線鼠標(biāo)進(jìn)行基于手勢(shì)的控制,或輪椅方向控制,或Wii控制臺(tái)中的陀螺儀。其他例子包括使用手勢(shì)控制電視上的光標(biāo)的智能設(shè)備,或“虛擬”旋鈕,甚至是手勢(shì)命令來(lái)控制帶有手持無(wú)線傳感器單元的外部設(shè)備。?
結(jié)論
MEMS加速度計(jì)傳感器和陀螺儀長(zhǎng)期以來(lái)一直廣泛用于船舶、航天、工業(yè)機(jī)器人和汽車(chē)等領(lǐng)域。但是它們的應(yīng)用多功能性現(xiàn)在已經(jīng)擴(kuò)展到智能手機(jī),它們?yōu)槲覀兲峁┝艘环N使用智能設(shè)備進(jìn)行運(yùn)動(dòng)和手勢(shì)交互的新方式。了解MEMS行為以及加速度計(jì)或陀螺儀的特性,設(shè)計(jì)人員能夠?yàn)榇笈繎?yīng)用設(shè)計(jì)更高效、更低成本的產(chǎn)品。這些MEMS器件還使我們能夠創(chuàng)建新的應(yīng)用,這些應(yīng)用正在深刻改變我們的動(dòng)作、身體運(yùn)動(dòng)和手勢(shì)如何影響我們的生活方式。
審核編輯:郭婷
-
傳感器
+關(guān)注
關(guān)注
2565文章
52987瀏覽量
767306 -
陀螺儀
+關(guān)注
關(guān)注
44文章
847瀏覽量
100013 -
加速度計(jì)
+關(guān)注
關(guān)注
6文章
727瀏覽量
46845
發(fā)布評(píng)論請(qǐng)先 登錄
想開(kāi)發(fā)一個(gè)智能坐墊,獲取坐姿的傳感器選什么加速度計(jì)或者陀螺儀合適?
請(qǐng)問(wèn)為什么陀螺儀需校準(zhǔn)而加速度計(jì)不需?
介紹加速度計(jì)和陀螺儀的數(shù)學(xué)模型和基本算法
介紹加速度計(jì)和陀螺儀的數(shù)學(xué)模型和基本算法
如何結(jié)合加速度傳感器和陀螺儀的數(shù)據(jù)呢
一種適用于小型無(wú)人機(jī)的加速度計(jì)與陀螺儀的矯正方法
加速度計(jì)和陀螺儀的參數(shù)意義

九軸傳感器之加速度計(jì)是怎么回事
AN-688: iMEMS?加速度計(jì)和陀螺儀的相位與頻率響應(yīng)

MEMS加速度計(jì)與MEMS陀螺儀的區(qū)別






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論