 如何計算以1Mbps運行的隔離CAN網絡的控制器參數
如何計算以1Mbps運行的隔離CAN網絡的控制器參數

CAN是一種廣泛用于汽車的差分信號標準, 工業和儀器儀表行業。它用于串行通信 在可以連接到不同電源系統的系統之間,通常 長距離。由于這些環境,電流隔離通常是 用于斷開接地回路或提供人身安全。
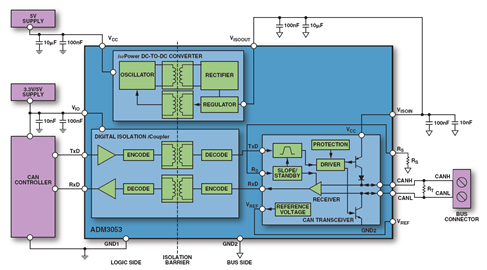
隔離式CAN網絡的傳播延遲將增加 非隔離的CAN網絡,設計起來通常具有挑戰性。 圖1所示為隔離式CAN節點示例,該節點使用ADM3053信號和電源隔離CAN收發器計算必要的CAN模塊 通過 20 m 電纜以 1 Mbps 通信的控制器參數。
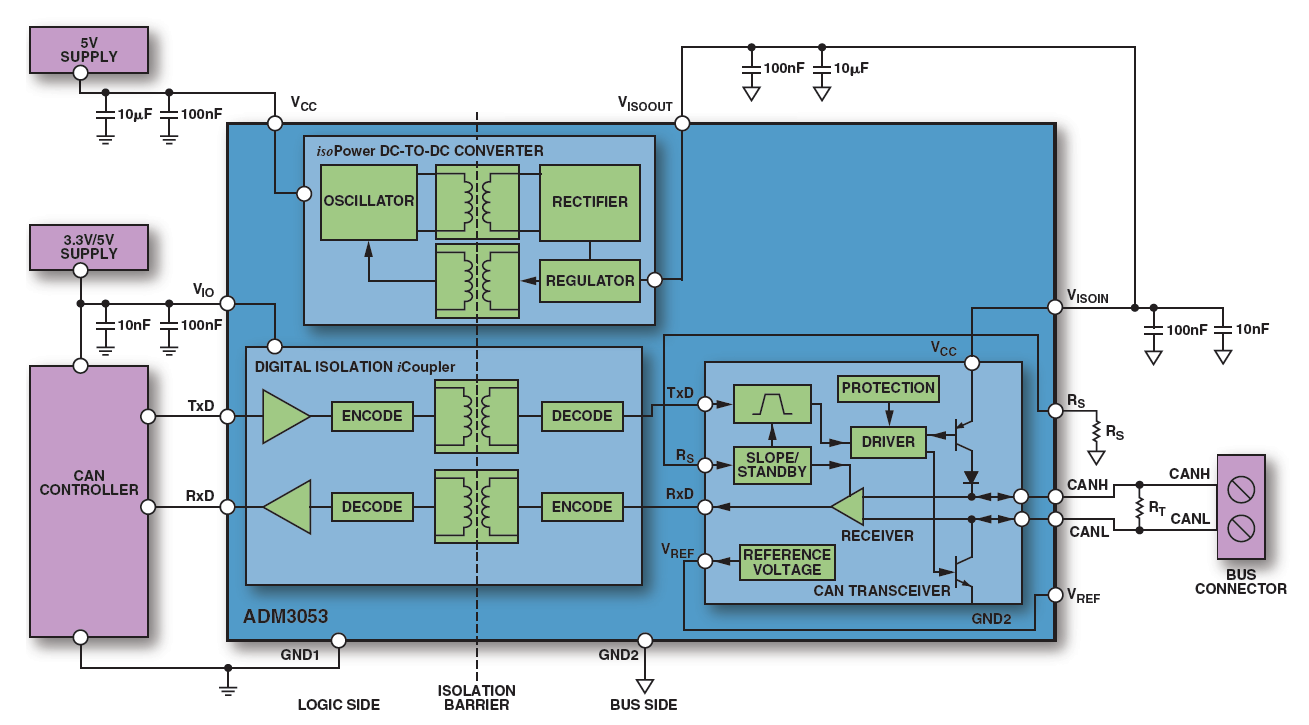
圖1.隔離式CAN節點采用ADM3053信號和電源隔離CAN收發器。
一個CAN位由四個獨立的時間段組成,同步段 (SYNC_SEG)、傳播段 (PROP_SEG)、相段 1 (PHASE_SEG1)和階段段2(PHASE_SEG2)。這些時間段 可在CAN控制器中編程,對于計算設置至關重要 CAN控制器的參數。圖 2 顯示了 標稱位時間。

圖2.CAN標稱位時間。
在計算過程中進行了以下假設:
電纜長度 20 m
數據速率或比特率為 1 Mbps
電纜傳播延遲為 5 ns/m
CAN控制器振蕩器頻率 的 36 兆赫
CAN 使用按位仲裁,它允許不同的節點 爭奪公共汽車上的訪問權。這會導致多個節點 能夠一次傳輸數據。傳輸節點將 必須對總線上的數據進行采樣,以確定它是否 贏得了仲裁。由于系統的傳播延遲, 控制器必須補償何時對每個位進行采樣。 將PROP_SEG編程到控制器中將允許這樣做 補償,可以按如下方式計算:
ADM3053從TxD到RxD的傳播延遲為: 250 ns(最大值)。
電纜的物理延遲等于 5 ns/m 乘以 長度為 20 m,總長度為 100 ns。
這給出了通過系統并返回的總傳播時間 AS 2(物理延遲 + 收發器道具延遲)等于 700 ns (2 × (100 + 250) = 700 ns)。
為了對控制器進行編程,必須設置寄存器 作為稱為時間量程的單位的整數倍。時間 時間周期量子等于CAN系統時鐘, 在這種情況下為 28 ns。
28 ns 的時間量程將提供 36 (1000/28 = 36) 時間 每比特量子。
PROP_SEG = ROUND_UP (700 ns/28 ns) = 25 時間量子。
從每比特 36 個時間量子中,減去 25 表示 PROP_SEG 和 1 為了SYNC_SEG。這為PHASE_SEG1和 PHASE_SEG2。
由于CAN系統時鐘中的公差,累積的 將發生相位誤差。這需要系統重新同步 通過重新同步跳轉 (RJW)。這被確定為 較小的值 4 和 PHASE_SEG1。
這使我們能夠計算所需的振蕩器容差 系統:
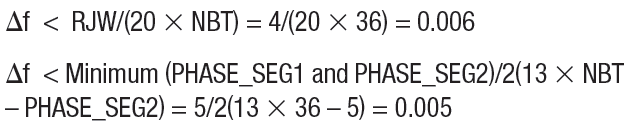
這兩個值中較小的一個是所需的振蕩器 容差,0.5%。
此計算給出以下設置參數:
SYNC_SEG = 1
PROP_SEG = 25
PHASE_SEG1 = 5
PHASE_SEG2 = 5
RJW = 4
審核編輯:郭婷
-
電源
+關注
關注
185文章
18357瀏覽量
256079 -
收發器
+關注
關注
10文章
3671瀏覽量
107872 -
控制器
+關注
關注
114文章
17088瀏覽量
184024
發布評論請先 登錄
為什么CAN總線最高速度為1Mbps?
請問4Mbps和1Mbps的速率下應該跑什么協議棧和網絡層?
TJA1040 1044國產替代DP1040 5V供電,±40V接口耐壓,1Mbps 高速CAN總線收發器
如何計算控制器參數使隔離式CAN(控制器區域網絡)網絡以1Mbps的速度運行
如何計算以1Mbps運行的隔離CAN網絡的控制器參數
CAN總線為什么能在1Mbps上傳輸超過50M?
為何CAN總線最高速度只能到1Mbps?
ISO7241A-EP 1Mbps四通道數字隔離器數據表

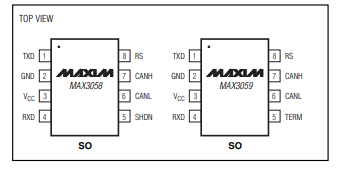
MAX3058/MAX3059 5V、1Mbps、低電源電流CAN收發器技術手冊





 工商網監
工商網監
評論