") 陀螺儀機(jī)械性能:最重要的參數(shù)
陀螺儀機(jī)械性能:最重要的參數(shù)
選擇陀螺儀是基于最大誤差源最小化的有意義的——在大多數(shù)應(yīng)用中,這將是振動(dòng)靈敏度。其他參數(shù)可以通過(guò)校準(zhǔn)或平均多個(gè)傳感器輕松增強(qiáng)。偏置穩(wěn)定性是誤差預(yù)算中較小的組成部分之一。
在查看高性能陀螺儀數(shù)據(jù)手冊(cè)時(shí),大多數(shù)系統(tǒng)設(shè)計(jì)人員首先要考慮的是偏置穩(wěn)定性規(guī)格。畢竟,這就是描述陀螺儀分辨率底線的原因,所以它肯定是陀螺儀性能的最佳預(yù)測(cè)指標(biāo)!然而,現(xiàn)實(shí)世界中的陀螺儀由于多種來(lái)源而出現(xiàn)誤差,使用戶無(wú)法利用數(shù)據(jù)手冊(cè)中吹捧的高偏置穩(wěn)定性。事實(shí)上,唯一能讓你獲得這種性能水平的地方就是在實(shí)驗(yàn)室工作臺(tái)上。經(jīng)典方法是增加補(bǔ)償,以盡量減少這些誤差源的影響。本文將討論其中幾種技術(shù)及其局限性。最后,我們將討論另一種范式——選擇陀螺儀以獲得機(jī)械性能,以及如何在必要時(shí)提高其偏置穩(wěn)定性。
環(huán)境錯(cuò)誤
所有低成本和中等成本MEMS陀螺儀都表現(xiàn)出一些零時(shí)間零偏置和比例因子誤差,以及隨溫度變化的一些變化。因此,用戶通常對(duì)它們進(jìn)行溫度補(bǔ)償。一般來(lái)說(shuō),陀螺儀包含僅用于此目的的集成溫度傳感器。溫度傳感器的絕對(duì)精度對(duì)于這項(xiàng)任務(wù)并不重要,重要的是溫度傳感器的可重復(fù)性和與實(shí)際陀螺儀溫度的緊密耦合。現(xiàn)代陀螺儀的溫度傳感器幾乎從不滿足這些要求。
有許多技術(shù)可用于溫度補(bǔ)償(多項(xiàng)式曲線擬合、分段線性近似等)。只要記錄了足夠數(shù)量的溫度點(diǎn)并在校準(zhǔn)過(guò)程中足夠小心,所使用的特定技術(shù)就無(wú)關(guān)緊要。例如,每個(gè)溫度下的浸泡時(shí)間不足就是一個(gè)常見(jiàn)的錯(cuò)誤源。然而,無(wú)論使用哪種技術(shù)或采取多少謹(jǐn)慎措施,限制因素都將是溫度滯后 - 即通過(guò)冷卻與加熱接近特定溫度時(shí)的輸出差異。
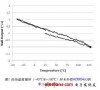
圖1顯示了ADXRS453陀螺儀的溫度遲滯環(huán)路。記錄未補(bǔ)償陀螺儀的零偏置測(cè)量,溫度變化范圍為+25°C至+130°C,至–45°C,回+25°C。 加熱循環(huán)和冷卻循環(huán)在+25°C時(shí)的零偏置輸出差異很小(在本例中約為0.2°/s),這就是溫度滯后。無(wú)論陀螺儀是否通電,該誤差都無(wú)法補(bǔ)償。此外,遲滯的大小與施加的溫度“激勵(lì)”量成比例變化。也就是說(shuō),當(dāng)對(duì)設(shè)備施加更大的溫度范圍時(shí),會(huì)出現(xiàn)更多的滯后。

圖1.ADXRS453在整個(gè)溫度(–45°C至+130°C)范圍內(nèi)循環(huán)時(shí)的無(wú)補(bǔ)償ADXRS453零偏置輸出
如果應(yīng)用允許在導(dǎo)通時(shí)復(fù)位零偏置(即,在沒(méi)有旋轉(zhuǎn)時(shí)發(fā)生導(dǎo)通)或零偏置的現(xiàn)場(chǎng)歸零,則可以忽略此錯(cuò)誤。否則,這可能是一個(gè)偏置穩(wěn)定性性能限制器,因?yàn)闊o(wú)法控制運(yùn)輸或存儲(chǔ)條件。
振動(dòng)抑制
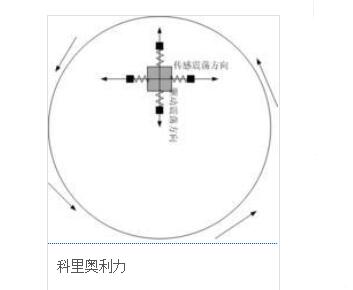
理想情況下,陀螺儀只能測(cè)量旋轉(zhuǎn)速率,而不能測(cè)量其他任何內(nèi)容。在實(shí)踐中,由于機(jī)械設(shè)計(jì)的不對(duì)稱和/或微加工不精確,所有陀螺儀對(duì)加速度都有一定的敏感性。事實(shí)上,加速度靈敏度有多種表現(xiàn)形式,其嚴(yán)重程度因設(shè)計(jì)而異。最重要的是對(duì)線性加速度(或g靈敏度)和振動(dòng)校正(或g2靈敏度)。由于大多數(shù)陀螺儀應(yīng)用都是在地球1 g重力場(chǎng)中移動(dòng)和/或旋轉(zhuǎn)的設(shè)備,因此對(duì)加速度的敏感性通常是最大的誤差源。
超低成本陀螺儀通常使用極其簡(jiǎn)單和緊湊的機(jī)械系統(tǒng)設(shè)計(jì),這些系統(tǒng)沒(méi)有針對(duì)振動(dòng)抑制進(jìn)行優(yōu)化(相反,它們是針對(duì)低成本進(jìn)行優(yōu)化的),并且可能會(huì)因振動(dòng)而受到很大影響。超過(guò) 1000°/h/g(或 0.3°/s/g)的 g 靈敏度或更高并非聞所未聞——比人們對(duì)高性能陀螺儀的期望差 10 倍以上!在這樣的陀螺儀中尋找良好的偏置穩(wěn)定性是沒(méi)有意義的,因?yàn)橥勇輧x通過(guò)地球重力場(chǎng)的小旋轉(zhuǎn)會(huì)導(dǎo)致由于g和g而產(chǎn)生的巨大誤差2敏感性。通常,這些類型的陀螺儀中沒(méi)有指定振動(dòng)靈敏度 - 假設(shè)它非常大。
更高性能的MEMS陀螺儀性能要好得多。表1顯示了幾種高性能MEMS陀螺儀的數(shù)據(jù)手冊(cè)規(guī)格。此類中的大多數(shù)陀螺儀顯示 g 靈敏度為 360°/h/g(或 0.1°/s/g),有些低于 60°/h/g。比成本非常低的陀螺儀好得多,但即使是其中最好的陀螺儀,當(dāng)受到低至150 mg(相當(dāng)于8.6°傾斜)的加速度變化時(shí),仍然超過(guò)其指定的偏置穩(wěn)定性。
表 1.
| 制造者 | 部件號(hào) |
靈敏度(°/s/g) |
g2靈敏度(°/s/g2) |
偏置穩(wěn)定性(°/h) |
|
ADI公司 |
ADXRS646 |
0.015 |
0.0001 |
8 |
| 邁來(lái)芯 |
MLX90609 |
0.1 |
未指定 |
17 |
|
硅傳感 |
CRG20-01 |
0.1 |
0.005 |
5 |
| VTI | SCR1100-D04 |
0.1 |
未指定 |
2.1 |
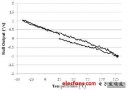
一些設(shè)計(jì)人員嘗試使用外部加速度計(jì)來(lái)補(bǔ)償g靈敏度(這在IMU應(yīng)用中最常完成,因?yàn)橐呀?jīng)存在必要的加速度計(jì)),這確實(shí)可以在某些情況下提高性能。然而,由于多種原因,g靈敏度補(bǔ)償不能完全成功。大多數(shù)陀螺儀往往具有g(shù)靈敏度,該靈敏度因振動(dòng)頻率而異。圖 2 顯示了硅傳感 CRG20-01 陀螺儀因振動(dòng)而做出的響應(yīng)。請(qǐng)注意,雖然陀螺儀的g靈敏度在其額定規(guī)格范圍內(nèi)(特定頻率下的一些小雜散除外,但這些雜散可能并不重要),但它確實(shí)在直流至100 Hz的12:1的比率范圍內(nèi)變化,因此無(wú)法通過(guò)簡(jiǎn)單地測(cè)量直流時(shí)的g靈敏度來(lái)完成校準(zhǔn)。事實(shí)上,補(bǔ)償方案將非常復(fù)雜,需要隨頻率變化的靈敏度。

圖2.硅傳感 CRG20-01 g 對(duì)各種正弦音的靈敏度響應(yīng)
相比之下,圖3顯示了ADXRS646陀螺儀在類似條件下的響應(yīng)。結(jié)論是,有些陀螺儀比其他陀螺儀更容易進(jìn)行g(shù)靈敏度補(bǔ)償。遺憾的是,這些信息幾乎從未在數(shù)據(jù)手冊(cè)中提供,用戶必須發(fā)現(xiàn)這些信息,而且很可能非常痛苦,通常在系統(tǒng)設(shè)計(jì)期間沒(méi)有時(shí)間感到驚訝。

圖3.ADI公司ADXRS646 g隨機(jī)振動(dòng)靈敏度響應(yīng)(15 g rms,0.11 g2/Hz) 1600 Hz 過(guò)濾
另一個(gè)困難在于補(bǔ)償加速度計(jì)的相位響應(yīng)與陀螺儀相匹配。如果陀螺儀和補(bǔ)償加速度計(jì)的相位響應(yīng)不匹配,高頻振動(dòng)誤差實(shí)際上可能會(huì)被放大!引出另一個(gè)結(jié)論:g靈敏度補(bǔ)償僅適用于大多數(shù)陀螺儀的低頻。
振動(dòng)校正通常未指定。有時(shí)這是因?yàn)樗钊藢擂蔚夭罨蛞蛟O(shè)備而異。有時(shí)這僅僅是由于陀螺儀制造商不愿意測(cè)試或指定它(公平地說(shuō),可能很難測(cè)試)。無(wú)論哪種方式,振動(dòng)校正都應(yīng)該引起關(guān)注,因?yàn)樗荒苡眉铀俣扔?jì)進(jìn)行補(bǔ)償。與加速度計(jì)的響應(yīng)不同,陀螺儀的輸出誤差得到了糾正。
改善 g 的最常見(jiàn)策略2靈敏度是添加機(jī)械防振支架。圖中是松下汽車陀螺儀,部分從其金屬罐包裝中取出。陀螺儀組件通過(guò)橡膠防振支架與金屬罐隔離。防振支架很難設(shè)計(jì),因?yàn)樗鼈冊(cè)诤軐挼念l率范圍內(nèi)沒(méi)有平坦的響應(yīng)(它們?cè)诘皖l下工作得特別差),并且它們的減振特性會(huì)隨著溫度和壽命而變化。實(shí)際上,與g靈敏度一樣,陀螺儀的振動(dòng)校正響應(yīng)可能隨頻率而變化。雖然可以成功地設(shè)計(jì)防振支架來(lái)衰減已知頻譜中的窄帶振動(dòng),但對(duì)于可能存在寬帶振動(dòng)的任何通用應(yīng)用,這種安裝座都是有問(wèn)題的。
由于機(jī)械濫用而導(dǎo)致的重大不當(dāng)行為
許多應(yīng)用通常都會(huì)發(fā)生短期濫用事件,雖然不會(huì)損壞陀螺儀,但會(huì)產(chǎn)生較大的錯(cuò)誤。下面介紹幾個(gè)例子。
一些陀螺儀不能容忍速率過(guò)載而沒(méi)有不當(dāng)行為。圖5顯示了硅傳感CRG20陀螺儀在指定范圍內(nèi)對(duì)輸入進(jìn)行約70%速率的響應(yīng)。左邊的曲線顯示了當(dāng)陀螺儀從0°/s到500°/s旋轉(zhuǎn)并持續(xù)時(shí)CRS20的響應(yīng)。右邊的曲線顯示了當(dāng)輸入速率從500°/s降低到0°/s時(shí)的響應(yīng)。當(dāng)速率輸入超出額定測(cè)量范圍時(shí),輸出在軌與軌之間大幅擺動(dòng)。

圖5.硅傳感 CRG-20 對(duì) 500°/s 速率輸入的響應(yīng)
其他陀螺儀在暴露于小至幾百克的沖擊時(shí)有“鎖定”的趨勢(shì)。例如,圖 6 顯示了 VTI SCR1100-D04 在受到 250 g 0.5 ms 沖擊時(shí)的響應(yīng)(通過(guò)將 5 mm 鋼球從 40 cm 的距離落到陀螺儀旁邊的 PCB 上產(chǎn)生)。陀螺儀沒(méi)有被電擊損壞,但它不再響應(yīng)速率,需要重新通電才能重新啟動(dòng)。這并不罕見(jiàn);幾個(gè)陀螺儀表現(xiàn)出類似的行為。明智的做法是檢查所考慮的陀螺儀是否可以承受應(yīng)用中的沖擊。

圖6.VTI SCR1100-D04 對(duì) 250 g、0.5 ms 沖擊的響應(yīng)
顯然,這種類型的錯(cuò)誤會(huì)非常大。因此,在確定任何給定應(yīng)用中可能存在哪些濫用條件并驗(yàn)證陀螺儀是否可以容忍這些條件時(shí),必須小心謹(jǐn)慎。
誤差預(yù)算計(jì)算
如前所述,大多數(shù)陀螺儀應(yīng)用都處于存在運(yùn)動(dòng)或振動(dòng)的情況下。表2顯示了表1所示用于各種應(yīng)用的陀螺儀的典型誤差預(yù)算,使用前面所示的數(shù)據(jù)手冊(cè)規(guī)格(在未指定振動(dòng)校正的情況下,使用保守估計(jì)值)。如表3所示,增加g靈敏度補(bǔ)償方案,將振動(dòng)性能提高半個(gè)數(shù)量級(jí)(并非易事),仍然導(dǎo)致振動(dòng)靈敏度通常比偏置穩(wěn)定性產(chǎn)生更大的誤差。
表 2.多個(gè)陀螺儀振動(dòng)引起的估計(jì)誤差(°/s)(未補(bǔ)償)
| 制造者 | Part Number |
Running (2 g Peaks) |
Helicopter (0.4 g Vibration) |
Shipboard (0.5 g Listing) |
Construction Equipment (50 g Peaks) |
|
ADI公司 |
ADXRS646 |
4 | 22 | 5 | 36 |
| 邁來(lái)芯 |
MLX90609 |
35 |
150 |
38 | 1080 |
|
硅傳感 |
CRG20-01 |
32 |
147 |
37 | 630 |
| VTI | SCR1100-D04 | 35 | 150 | 38 | 1080 |
表 3.使用g靈敏度補(bǔ)償?shù)亩鄠€(gè)陀螺儀的振動(dòng)估計(jì)誤差(°/s)(g靈敏度提高5倍)
| 制造者 | Part Number |
Running (2 g Peaks) |
Helicopter (0.4 g Vibration) |
Shipboard (0.5 g Listing) |
Construction Equipment (50 g Peaks) |
|
ADI公司 |
ADXRS646 |
1 | 4 | 1 | 14 |
| 邁來(lái)芯 |
MLX90609 |
12 |
35 |
9 | 936 |
|
硅傳感 |
CRG20-01 |
9 |
32 |
8 | 486 |
| VTI | SCR1100-D04 | 12 | 35 | 9 |
936 |
新的選擇范式
由于偏置穩(wěn)定性是誤差預(yù)算的較小組成部分之一,因此根據(jù)陀螺儀對(duì)最大誤差源的最小化來(lái)選擇陀螺儀更為明智——在大多數(shù)應(yīng)用中,這將是振動(dòng)靈敏度。但是,有時(shí)您可能仍然希望獲得比所選陀螺儀更低的噪聲或更好的偏置穩(wěn)定性。幸運(yùn)的是,有一個(gè)解決方案:平均。
與設(shè)計(jì)驅(qū)動(dòng)的環(huán)境或振動(dòng)誤差不同,大多數(shù)陀螺儀的偏置穩(wěn)定誤差具有噪聲特性。也就是說(shuō),設(shè)備與設(shè)備之間不相關(guān)。因此,可以通過(guò)對(duì)多個(gè)器件求平均值來(lái)提高偏置穩(wěn)定性性能。每平均 n 個(gè)設(shè)備,可以預(yù)期改進(jìn) √n。通過(guò)平均多個(gè)陀螺儀,寬帶噪聲也可以得到類似的改善。
結(jié)論
雖然偏置穩(wěn)定性長(zhǎng)期以來(lái)一直被認(rèn)為是陀螺儀的“黃金標(biāo)準(zhǔn)”規(guī)格,但在現(xiàn)實(shí)世界中,振動(dòng)靈敏度通常是更嚴(yán)重的性能限制。根據(jù)陀螺儀的振動(dòng)抑制能力選擇陀螺儀是明智的,因?yàn)槠渌麉?shù)可以通過(guò)校準(zhǔn)或平均多個(gè)傳感器輕松增強(qiáng)。
審核編輯:郭婷
-
傳感器
+關(guān)注
關(guān)注
2564文章
52722瀏覽量
764695 -
mems
+關(guān)注
關(guān)注
129文章
4092瀏覽量
192881 -
陀螺儀
+關(guān)注
關(guān)注
44文章
835瀏覽量
99781
發(fā)布評(píng)論請(qǐng)先 登錄
蘋(píng)果的手機(jī)陀螺儀怎么工作的,它與機(jī)械陀螺儀有哪些異同?
ADI陀螺儀資料大集合
陀螺儀機(jī)械性能的最重要參數(shù)
提升偏壓穩(wěn)定/振動(dòng)敏感度,高性能陀螺儀可靠度大增
陀螺儀機(jī)械性-最重要的參數(shù)
陀螺儀的選擇:其機(jī)械性能是最重要的參數(shù)
陀螺儀有什么用_陀螺儀的特性圖解_陀螺儀的應(yīng)用
MEMS陀螺儀技術(shù)原理_三軸陀螺儀技術(shù)原理

MEMS陀螺儀在戰(zhàn)術(shù)武器應(yīng)注意的要點(diǎn)
陀螺儀機(jī)械性能:最重要的參數(shù)
微機(jī)械陀螺儀工作原理_微機(jī)械陀螺儀的應(yīng)用
陀螺儀機(jī)械性能的那些最重要參數(shù)資料下載

最重要的參數(shù):陀螺儀機(jī)械性能
陀螺儀的基本組成 陀螺儀的工作原理 陀螺儀的作用
振動(dòng)陀螺儀傳感器的工作原理





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論