 將制圖師3D圖形SLAM堆棧用于無人機導航
將制圖師3D圖形SLAM堆棧用于無人機導航
SLAM實現的任務是根據傳感器觀察創建一致的世界地圖。這項任務需要檢測以前訪問過的區域,并使用這些信息來細化軌跡(及其尾部,當前的車輛姿態估計)。在SLAM術語中,這些事件稱為閉環,是減少隨時間累積的漂移量的關鍵。
制圖師是一種最初由谷歌開發的開源 LiDAR 圖形 SLAM 堆棧。圖形SLAM實現的架構通常被視為由兩部分組成:特定于傳感器的前端,用于處理傳感器數據并構建姿勢圖,以及與傳感器無關的后端,用于執行姿態圖優化。制圖師包括兩個組件:本地軌跡生成器(也稱為本地 SLAM)和全局 SLAM。
本地軌跡生成器組件是SLAM前端的一部分。它使用體素占用網格掃描匹配器和地圖構建器來構建一組時間緊湊的子地圖,其中每個掃描都插入到兩個相鄰的子地圖中。前端的第二部分是全局SLAM組件的約束生成器子系統,它使用基于分支和邊界的快速相關掃描匹配器來發現舊子映射和新激光掃描之間的閉環對應關系,反之亦然。
硬件說明
我們的實驗設置包括由Kopterworx公司組裝的定制四軸飛行器,如圖1所示。它具有四個T型電機P60 KV170推進裝置和22“折疊螺旋槳。車輛尺寸為1.2 x 1.2 x 0.45m,質量m = 9kg,包括所有電子設備和電池。更大的車輛規模可實現更大的機載電池容量,允許30分鐘的自主飛行時間。我們使用Pixhawk 2.1飛行控制器和ProfiCNC / HEX Kore大電流電源板。我們還安裝了一臺英特爾NUC 迷你電腦機載計算機,通過串行通信與飛行控制器通信。

圖1用于我們實驗的無人機平臺 操作員可以通過WiFi接口訪問NUC。安裝在車載計算機上的操作系統是帶有ROS Melodic中間件的Ubuntu Linux 18.04 LTS。除了飛行控制器外,機載計算機還與飛行器的完整感官設備進行通信,并運行高級計算密集型算法。此外,我們還連接了基于U-blox M8P IC的Velodyne Puck LITE LiDAR、LPMS CU2 外部 IMU 和 HERE+ GPS。這些實驗是在Borongaj大學校園的戶外進行的。在圖2所示的實驗中,GPS測量用于對軌跡進行地理配準。
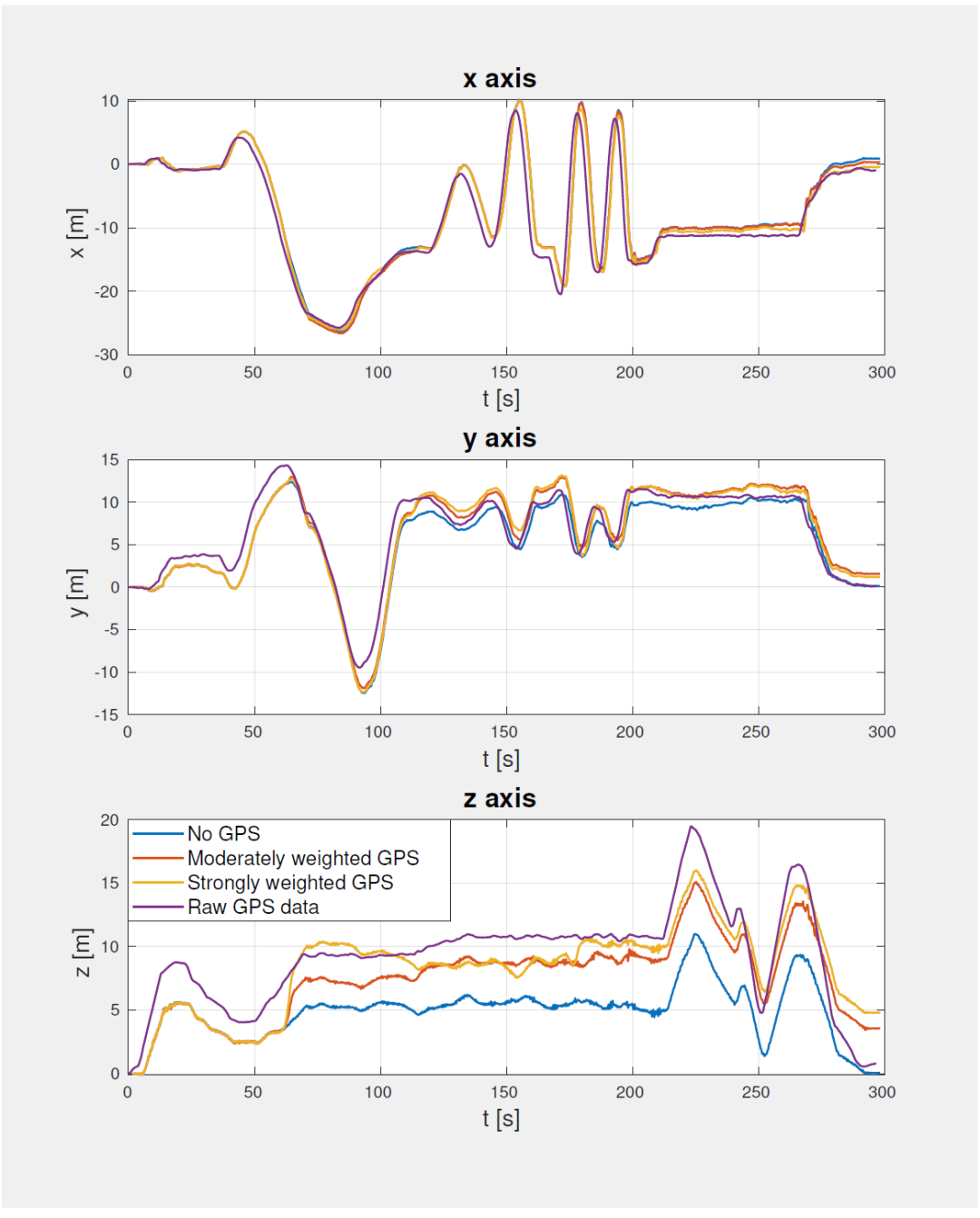
圖2制圖師針對不同 GPS 設置報告的無人機坐標比較 

安全閉環

 ? 圖1中的圖表記錄在圍繞一棟小建筑物的圓形軌跡上。軌跡足夠長,全局SLAM可以將一些閉環校正插入到姿勢圖中,并在優化中使用它們。這些在圖1所示的z軸圖上清晰可見,因為它們會在姿勢估計中引入階躍干擾。而引入的比例因子消除了這些臺階干擾,并確保了平滑的姿態估計。
? 圖1中的圖表記錄在圍繞一棟小建筑物的圓形軌跡上。軌跡足夠長,全局SLAM可以將一些閉環校正插入到姿勢圖中,并在優化中使用它們。這些在圖1所示的z軸圖上清晰可見,因為它們會在姿勢估計中引入階躍干擾。而引入的比例因子消除了這些臺階干擾,并確保了平滑的姿態估計。
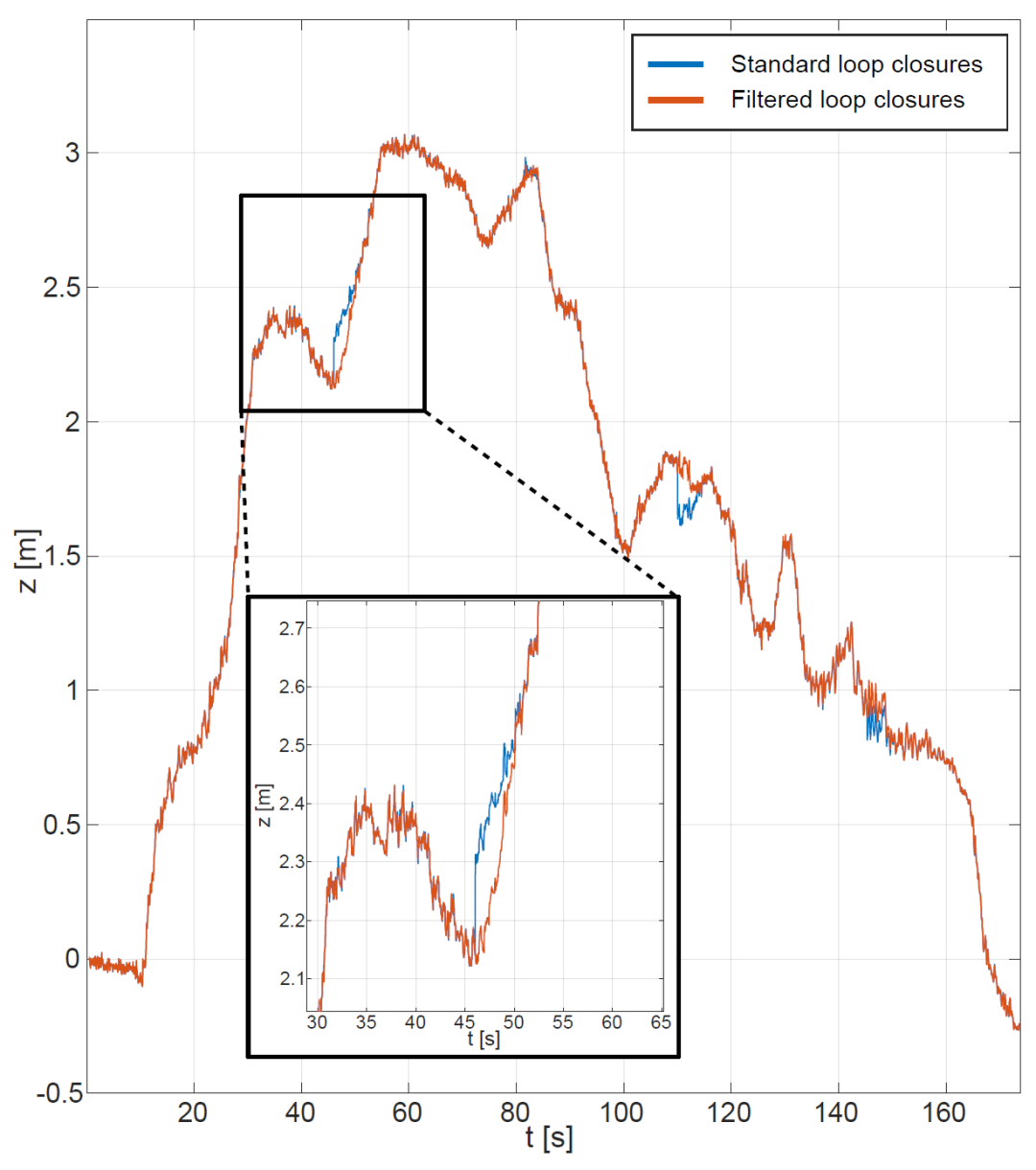
圖3在循環閉合的情況下,將過濾后的姿勢估計值與原始制圖師的姿態估計值進行比較
在空中SLAM中使用全球定位系統
? 由于大多數無人機默認配備GPS傳感器,因此我們嘗試利用此傳感器對SLAM軌跡進行地理參考。在我們的測試現場,GPS的標準偏差通常大于1.5米,因此事實證明,在軌跡優化中使用具有挑戰性。Pixhawk過濾的位置信號具有明顯的垂直漂移-起飛和著陸高度測量值之間存在80厘米的差異(實際上應該是相同的)。 ? 我們嘗試調整權重,該權重控制GPS測量如何影響姿勢估計,以便對軌跡進行地理參考。不幸的是,我們還沒有設法完全消除不準確的GPS測量對姿態估計的負面影響,而不會在優化過程中極大地減輕它們的重量,延長獲得位置和方向鎖定所需的時間。圖2顯示了制圖員在不使用 GPS 測量值和兩種不同的 GPS 測量權重的情況下報告的姿態估計值。Pixhawk報告的GPS測量值(因此軌跡僅限于它們)不一致,因為報告的起飛和著陸高度不匹配。該圖還顯示了在第一個姿勢圖優化時報告的高度的劇烈變化。 ? 較短的 SLAM 軌跡(例如圖2中在沒有GPS 測量的情況下處理的軌跡)可以被視為地面實況,盡管沒有地理配準,因為不同的 LiDAR 點云要素(如墻壁和屋頂邊緣)在地圖中保持一致。這種一致性主要是由于發現的閉環約束,軌跡不同部分的激光掃描被正確交叉配準。 ?
導航
? 提取制圖師子地圖,將其轉換為點云并使用這些點云構建OctoMap,使我們的無人機能夠在其環境中規劃無碰撞路徑。因此,在我們的系統中引入OctoMap使我們不僅可以使用制圖師進行姿態反饋,還可以將其用作導航有用的環境信息來源。圖4 顯示了使用 Cartographer子地圖云構建的OctoMap示例,其中還顯示了無人機在導航過程中經過的路徑。 ?
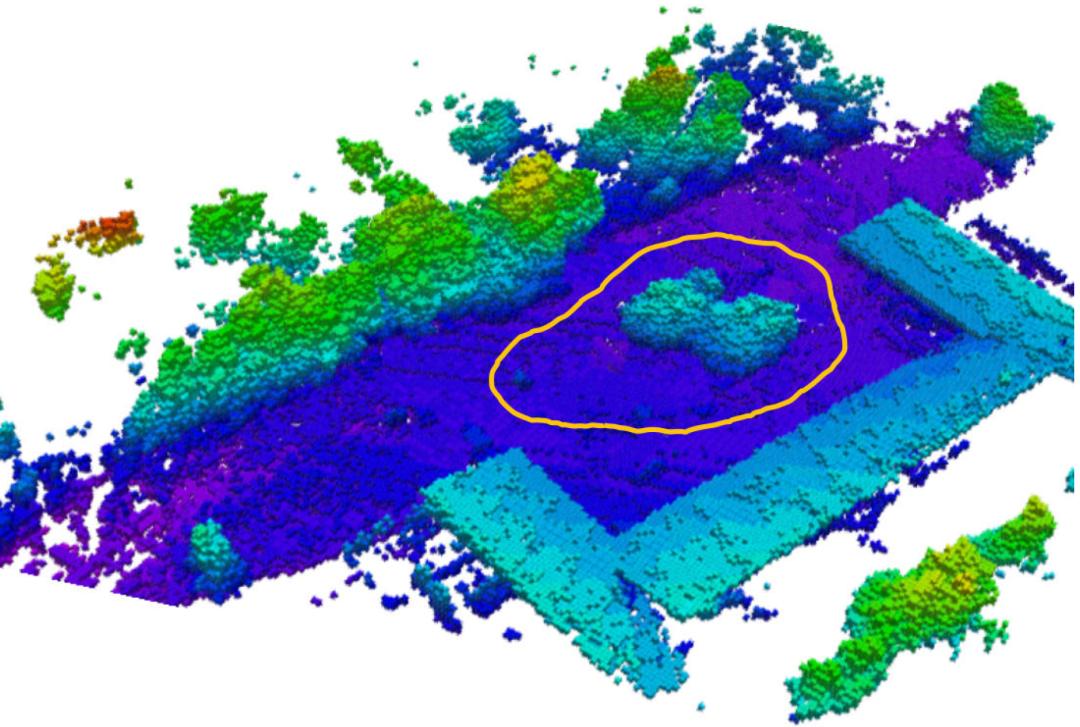
圖4導航期間創建的八元圖,其中包含無人機經過的路徑 環路閉合的過濾和子地圖云的提取是對制圖器代碼庫的有益補充。前者使姿態估計更適合于控制系統反饋,因為它消除了在環路閉合事件期間引入的階躍信號,而后者創造了使用子地圖規劃無人機執行的無碰撞路徑的可能性。目前最好避免在制圖師的這種特定配置中使用M8P GPS傳感器,因為它對姿勢估計質量有不利影響。所描述的GPS對準方法之前已成功測試并用于地面車輛(赫斯基AGV)的控制回路,以及基于制造商Novatel制造的慣性導航系統的專有商業勘測級LiDAR數據采集系統。
審核編輯 :李倩
-
傳感器
+關注
關注
2553文章
51467瀏覽量
756978 -
無人機
+關注
關注
230文章
10529瀏覽量
182663 -
SLAM
+關注
關注
23文章
427瀏覽量
31938
原文標題:將制圖師3D圖形SLAM堆棧用于無人機導航
文章出處:【微信號:雨飛工作室,微信公眾號:雨飛工作室】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
SKYLAB詳解無人機GPS模塊的作用及無人機gps模塊選型
制作 2D 導航無人機比你想象的更容易
文博會 合肥造植保無人機亮相
SLAM技術目前主要應用在哪些領域
3D制圖軟件中怎么設計凸輪?3D設計凸輪教程
超聲波傳感可用于無人機應用的原因
解析3D打印無人機的三大最佳應用領域
Nano-Racing無人機:3D打印機身讓裝配更簡單
高速飛行的無人機用SLAM怎樣導航
全球最大的FDM 3D打印無人機
英國工程師發明無人機使用3D打印瀝青修復道路
當3D打印應用在無人機有何不同?
基于3D設計和打印的單轉子無人機方案





 工商網監
工商網監
評論