 壓電陶瓷驅動器的精密運動控制
壓電陶瓷驅動器的精密運動控制

關于壓電陶瓷驅動器
壓電陶瓷驅動器有著納米級定位分辨率,阻滯力大,剛度高,響應速度快,尺寸小,重量輕等優點而被廣泛的應用于各種需要超高精度運動定位的場合之中。由于單片壓電陶瓷所能輸出的力和位移都比較有限,實際應用中,常使用的是一種堆疊型壓電陶瓷驅動器,即通過一定數量的組合將壓電陶瓷材料疊加起來,從而提高了驅動器輸出位移的總長度。
壓電陶瓷驅動器的特點
壓電陶瓷驅動器雖然具有很多優點,但是在使用過程中,也面臨著遲滯、蠕變和漂移等問題,這些問題將使得壓電陶瓷具有較高的非線性特征。非線性特征的誤差一般以遲滯為主。遲滯效應是外加電壓與輸出位移之間的一種非線性關系,它可以導致嚴重的開環定位誤差,誤差范圍可高達整個定位行程的10%~15%。這就造成了傳統的控制方法的不可用,同時壓電陶瓷執行器的精準的數學模型也很難獲得,使得一些經典控制算法不能很好的對其靜態和動態性能進行描述,同時也不能很好的體現其響應速度快等優點。因此,需要一定的控制技術來消除壓電陶瓷非線性的影響。
PID閉環控制方式
針對壓電陶瓷遲滯誤差對平臺的影響,三英精控主要通過PID閉環控制方式來進行補償。以下是PID 算法及其相關優化算法的相關介紹:
1、PID閉環控制
采用PID閉環控制算法,將輸出位移誤差反饋到 PZT 輸入端,通過不斷修正輸入值來最終消除誤差。所謂PID閉環控制算法,是利用基礎的比例、積分、微分模塊組合而成,通過閉環控制對壓電陶瓷驅動器起到優化動態性能的作用。
2、BP網絡PID控制
網絡PID控制能夠通過自動調整連接權值來不斷優化PID控制參數,也就是在不斷修正PID的三個控制參數,直到系統的輸出位移與給定輸入位移之間的誤差滿足要求,從而實現了系統的自適應優化控制。使得系統具有更強的抗干擾能力、更高的定位精度以及更好的適應性。
3、模糊小腦神經網絡PID控制
模糊小腦模型神經網絡(Fuzzy Cerebellar Model Articulation Controller,簡稱 FCMAC)是將微定位平臺系統的實際輸出位移與給定期望輸入位移之間計算得到的偏差值及其變化率輸入到網絡中,并按照預設的隸屬函數和模糊規則進行模糊化處理,再激活相關聯想單元和權值,以及進行反模糊化處理,得到網絡的輸出。因此,FCMAC 網絡從輸入到輸出可以分為輸入層、模糊感知層、模糊邏輯層、聯想強度層和輸出層。通過此控制方式可大幅度縮短系統穩定的時間。
審核編輯黃宇
-
驅動器
+關注
關注
54文章
8697瀏覽量
149965 -
PID
+關注
關注
37文章
1482瀏覽量
88059 -
運動控制
+關注
關注
4文章
721瀏覽量
33561 -
壓電陶瓷
+關注
關注
6文章
215瀏覽量
33912
發布評論請先 登錄
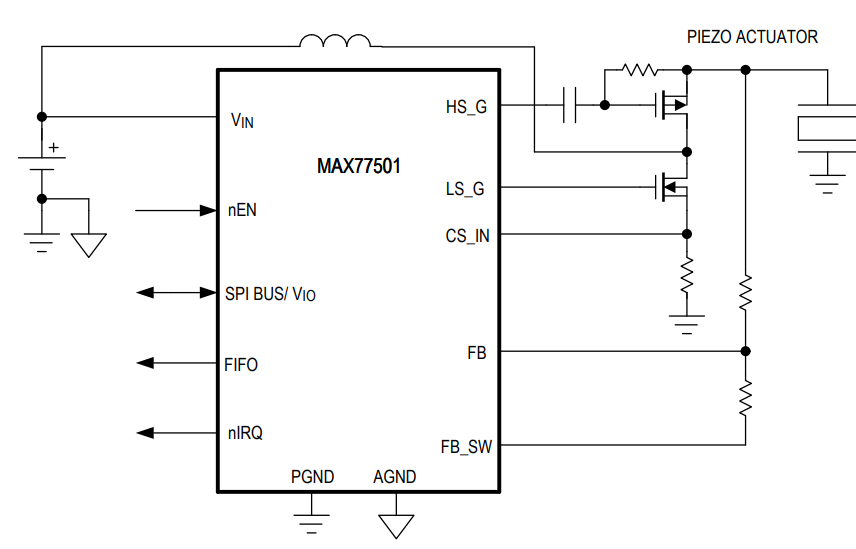
Analog Devices / Maxim Integrated MAX77501壓電觸覺執行器升壓驅動器特性及應用電路
高壓放大器基于壓電驅動的爬行機器人的研究實驗
EtherCAT科普系列(3): EtherCAT技術在伺服驅動器領域的應用

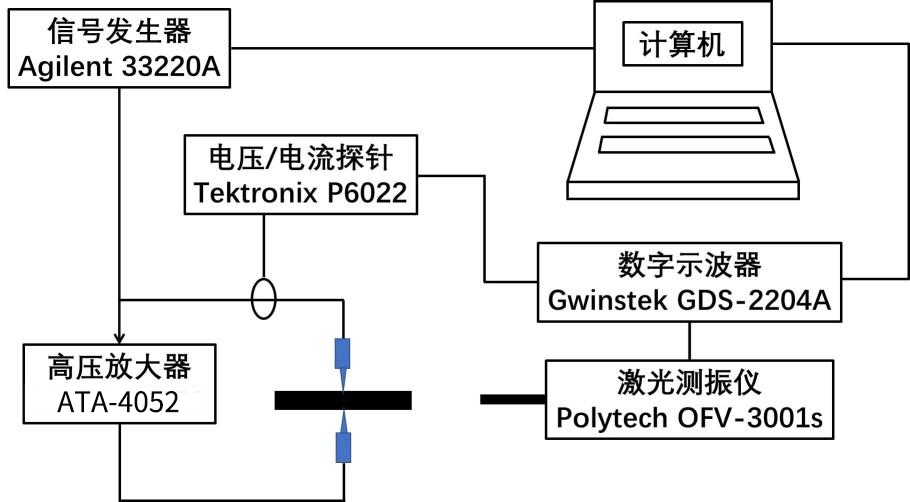
ATA-4052C高壓功率放大器在大功率壓電陶瓷驅動中的應用
伺服驅動器作用及其功能
功率放大器在驅動壓電陶瓷中的應用
伺服驅動器與步進電機的比較
步進電機驅動器的主要工作原理是什么?
步進電機驅動器有哪些類型?該如何分類?
面向伺服驅動器的運動控制解決方案

案例詳解——壓電陶瓷驅動實驗

高壓功率放大器在壓電疊堆驅動器研究中的應用





 工商網監
工商網監
評論