") 一種使用2D激光雷達(dá)在室內(nèi)場景下估計(jì)機(jī)器人姿態(tài)的方法
一種使用2D激光雷達(dá)在室內(nèi)場景下估計(jì)機(jī)器人姿態(tài)的方法

摘要
確定移動(dòng)機(jī)器人的狀態(tài)是機(jī)器人導(dǎo)航系統(tǒng)中重要的組成部分。在本文中,我們提出了一種使用2D激光雷達(dá)在室內(nèi)場景下估計(jì)機(jī)器人姿態(tài)的方法,并探討了如何將新型的場景表示模型整合到標(biāo)準(zhǔn)蒙特卡羅定位(MCL)系統(tǒng)中。在計(jì)算機(jī)視覺領(lǐng)域,神經(jīng)輻射場 (Neural Radiance Fields, NeRF)是用一個(gè)隱式函數(shù)來表示環(huán)境。我們將NeRF這樣的隱式環(huán)境表示擴(kuò)展到移動(dòng)機(jī)器人二維室內(nèi)定位任務(wù)中,提出了一種神經(jīng)占據(jù)場,使用神經(jīng)網(wǎng)絡(luò)來隱式的表示用于替代機(jī)器人定位任務(wù)中的二維地圖。
通過預(yù)訓(xùn)練的神經(jīng)網(wǎng)絡(luò),我們可以渲染合成當(dāng)前場景下任意機(jī)器人姿態(tài)所對(duì)應(yīng)的的2D 激光掃描。基于該隱式地圖,我們提出了一個(gè)觀測模型來計(jì)算渲染和真實(shí)掃描之間的相似性,并將其集成到MCL系統(tǒng)中進(jìn)行準(zhǔn)確的定位。我們?cè)谝唤M自己收集的數(shù)據(jù)集和三個(gè)公開可用的數(shù)據(jù)集上進(jìn)行評(píng)估。實(shí)驗(yàn)結(jié)果證明我們的方法可以準(zhǔn)確高效地估計(jì)機(jī)器人的姿態(tài),并在定位性能優(yōu)于現(xiàn)有的方法。實(shí)驗(yàn)表明,所提出的隱式地圖模型能夠更準(zhǔn)確的表示場景,從而提升了MCL系統(tǒng)中觀測模型的性能。
主要貢獻(xiàn)
我們提出了神經(jīng)占據(jù)場,一種隱式場景表示模型,在該模型之上提出了一個(gè)高性能的觀測模型,并整合到基于2D 激光的全局定位系統(tǒng)之中; 我們通過多個(gè)數(shù)據(jù)集的實(shí)驗(yàn)評(píng)估,實(shí)驗(yàn)結(jié)果證明,與使用傳統(tǒng)場景表示模型(例如:占據(jù)柵格地圖,希爾伯特地圖)相比,我們的方法在機(jī)器人全局定位方面具有競爭力的性能,且能快速收斂,并實(shí)時(shí)運(yùn)行。
主要方法
隱式場景表示
我們利用一組已知準(zhǔn)確姿態(tài)的2D激光數(shù)據(jù)作為訓(xùn)練樣本。如下圖所示,首先根據(jù)每一個(gè)樣本的姿態(tài)和2D激光雷達(dá)的內(nèi)參設(shè)置計(jì)算得到激光雷達(dá)每一條射線的方向,接著在每一條射線上均勻采樣N個(gè)空間點(diǎn)。之后,神經(jīng)網(wǎng)絡(luò)將采樣得到的每一個(gè)空間點(diǎn)p作為輸入,并輸出該空間點(diǎn)所對(duì)應(yīng)的占據(jù)概率pocc。
最后,對(duì)于每一條射線,利用光線投射(ray-casting)算法根據(jù)采樣點(diǎn)的深度m及其占據(jù)概率pocc進(jìn)行渲染得到射線所對(duì)應(yīng)的深度值:
最終,估計(jì)出當(dāng)前機(jī)器人姿態(tài)下可能會(huì)觀測到的2D激光掃描。接下來,我們通過計(jì)算幾何損失以及對(duì)預(yù)測的占據(jù)概率添加正則化來優(yōu)化神經(jīng)網(wǎng)絡(luò)的參數(shù)。
幾何損失是2D激光掃描的估計(jì)值和觀測值之間的 L1損失:
占據(jù)概率的正則化通過計(jì)算一個(gè)負(fù)對(duì)數(shù)似然來約束占據(jù)概率的預(yù)測值接近于1(被占據(jù))或0(不被占據(jù)):
最終,用與優(yōu)化神經(jīng)網(wǎng)絡(luò)參數(shù)的損失函數(shù)為:
全局定位系統(tǒng)
當(dāng)神經(jīng)網(wǎng)絡(luò)訓(xùn)練完成后,我們可以通過預(yù)測環(huán)境中任意機(jī)器人姿態(tài)所對(duì)應(yīng)的2D激光觀測。因此,我們將其整合到MCL系統(tǒng)之中,作為一個(gè)MCL系統(tǒng)的觀測模型。MCL系統(tǒng)如下圖所示,為了確定機(jī)器人當(dāng)前的姿態(tài),我們首先在當(dāng)前場景下采樣一定數(shù)量的機(jī)器人姿態(tài),稱之為“粒子”,如圖中藍(lán)色圓環(huán)所示。
每一個(gè)粒子包含了一個(gè)假設(shè)的機(jī)器人姿態(tài)和一個(gè)權(quán)重。當(dāng)機(jī)器人在環(huán)境中運(yùn)行時(shí),基于隱式表示的觀測模型將每一個(gè)粒子的姿態(tài)作為輸入,預(yù)測其在該姿態(tài)下的2D激光掃描,通過和真實(shí)的觀測值進(jìn)行比對(duì)來更新粒子的權(quán)重,并在每一迭代中移除低權(quán)重的粒子,保留高權(quán)重的粒子。重復(fù)該過程,粒子最終會(huì)收斂到真實(shí)姿態(tài)周圍的一個(gè)小區(qū)域。我們最終通過對(duì)收斂后的粒子姿態(tài)進(jìn)行加權(quán)平均后得到估計(jì)的機(jī)器人姿態(tài)。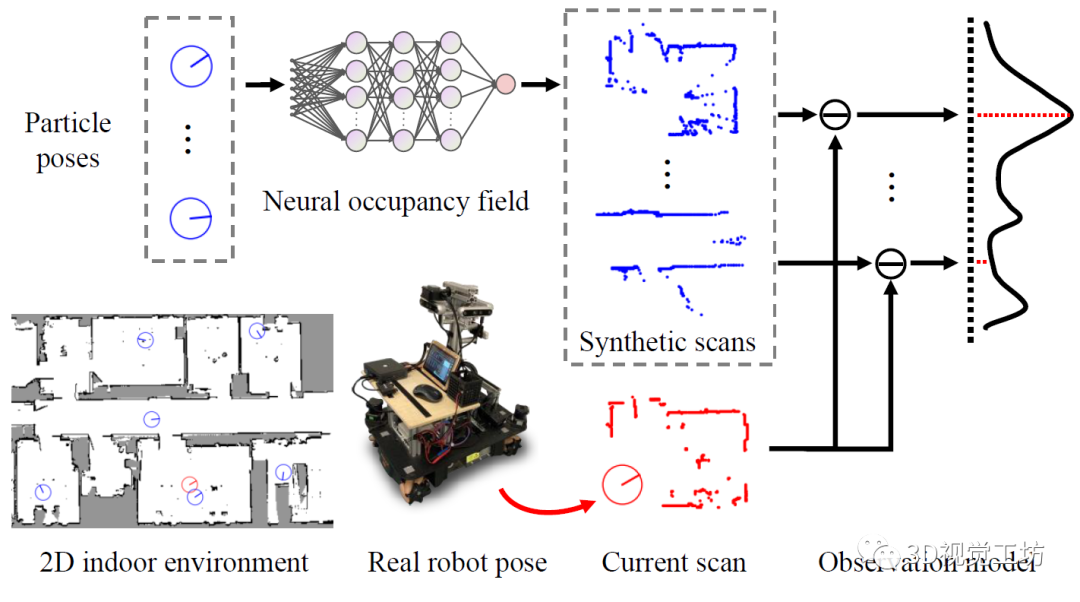
主要結(jié)果
室內(nèi)全局定位
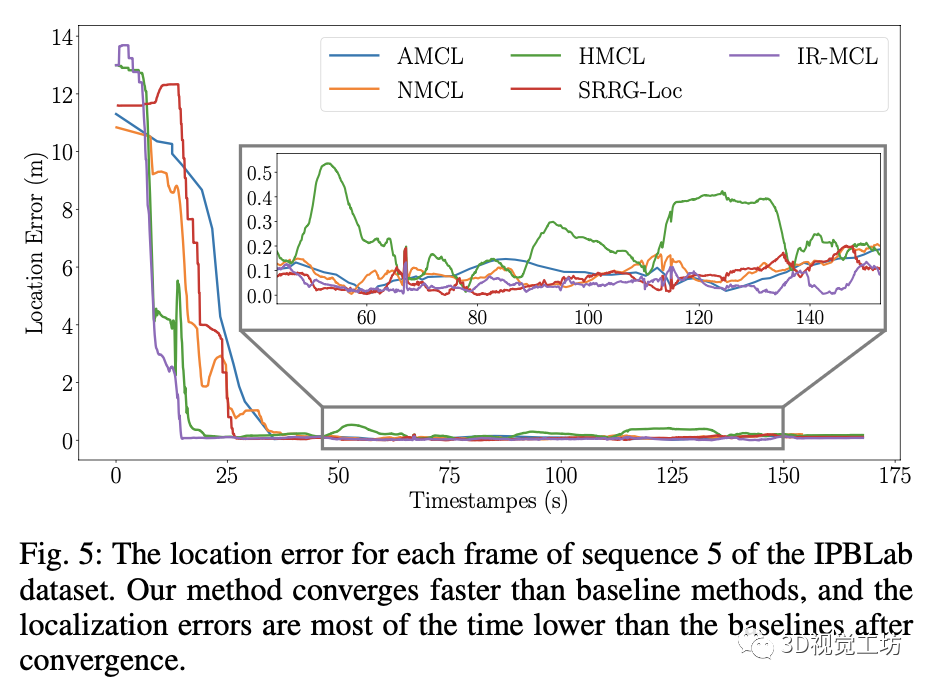
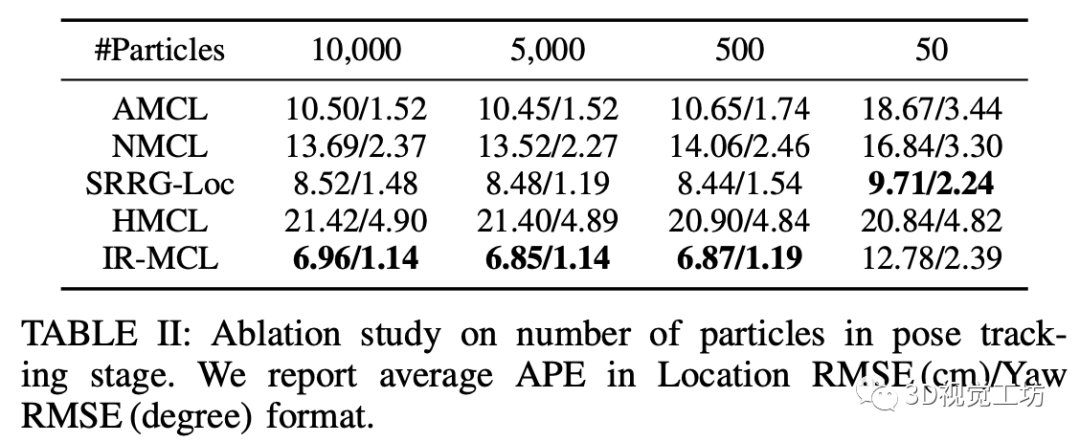
我們將現(xiàn)有的蒙特卡洛定位算法作為基線,在我們收集的數(shù)據(jù)集上對(duì)比了全局定位的精度,實(shí)驗(yàn)結(jié)果如下所示。實(shí)驗(yàn)結(jié)果證明,對(duì)比于現(xiàn)有的室內(nèi)定位算法,我們的方法在定位精度上達(dá)到了SOTA。此外,相比于之前的方法,我們的算法能更快的收斂。我們還補(bǔ)充了一個(gè)姿態(tài)追蹤實(shí)驗(yàn),用于證明我們的算法在不同量級(jí)的粒子數(shù)目下依然能表現(xiàn)出精確的定位能力。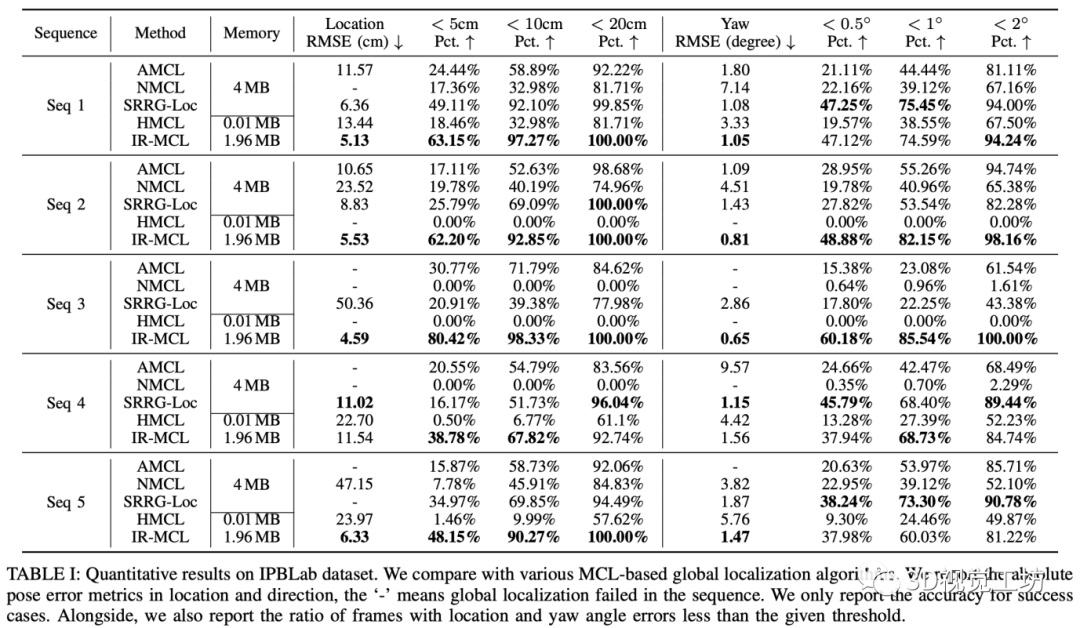
觀測模型
我們?cè)谌齻€(gè)經(jīng)典的室內(nèi)數(shù)據(jù)集(Freiburg Building 079, Intel Lab, MIT CSAIL)對(duì)我們的觀測模型進(jìn)行了評(píng)估。通過與基于柵格地圖的觀測模型進(jìn)行對(duì)比,證明了隱式場景表示是一種更準(zhǔn)確的地圖表示方法。當(dāng)訓(xùn)練數(shù)據(jù)較少時(shí)(如MIT CSAIL數(shù)據(jù)集),在預(yù)測沒有包含在訓(xùn)練集中的區(qū)域時(shí),隱式地圖展現(xiàn)出來更好的泛化能力。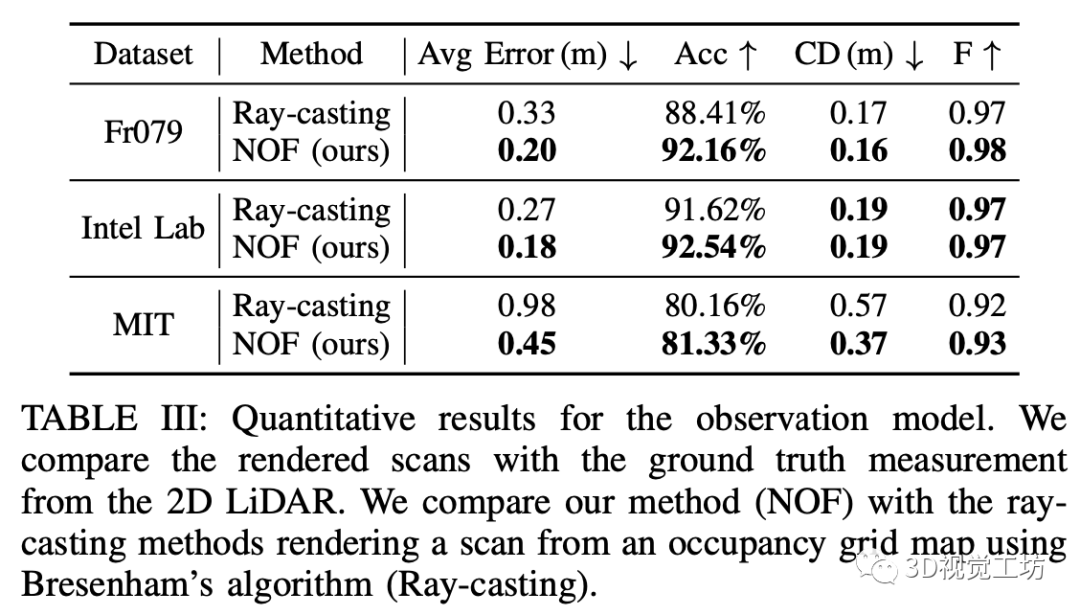
審核編輯:劉清
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29697瀏覽量
212602 -
神經(jīng)網(wǎng)絡(luò)
+關(guān)注
關(guān)注
42文章
4814瀏覽量
103439 -
激光雷達(dá)
+關(guān)注
關(guān)注
971文章
4230瀏覽量
192705
原文標(biāo)題:基于隱式神經(jīng)網(wǎng)絡(luò)NERF的室內(nèi)激光雷達(dá)定位算法
文章出處:【微信號(hào):3D視覺工坊,微信公眾號(hào):3D視覺工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
激光導(dǎo)航AGV底盤定制 巡檢機(jī)器人,服務(wù)機(jī)器人,智慧物流搬運(yùn)AGV
激光雷達(dá)分類以及應(yīng)用
常見激光雷達(dá)種類
激光雷達(dá)除了可以激光測距外,還可以怎么應(yīng)用?
讓機(jī)器人在陌生環(huán)境里穿梭自如的激光雷達(dá)
除了機(jī)器人行業(yè),激光雷達(dá)還能應(yīng)用于哪些領(lǐng)域?
機(jī)器人和激光雷達(dá)都不可或缺
TOF激光雷達(dá)
用于機(jī)器人避障的激光雷達(dá)避障傳感器安裝方式詳解
激光雷達(dá)的分類及其在機(jī)器人中的應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論