") 什么是深度學(xué)習(xí)中優(yōu)化算法
什么是深度學(xué)習(xí)中優(yōu)化算法
先大致講一下什么是深度學(xué)習(xí)中優(yōu)化算法吧,我們可以把模型比作函數(shù),一種很復(fù)雜的函數(shù):h(f(g(k(x)))),函數(shù)有參數(shù),這些參數(shù)是未知的,深度學(xué)習(xí)中的“學(xué)習(xí)”就是通過訓(xùn)練數(shù)據(jù)求解這些未知的參數(shù)。
由于這個(gè)函數(shù)太復(fù)雜了,沒辦法進(jìn)行直接求解,所以只能換個(gè)思路:衡量模型的輸出與真實(shí)標(biāo)簽之間的差距,如果差距過大,則調(diào)整模型參數(shù),然后重新計(jì)算差距,如此反復(fù)迭代,直至差距在接受范圍內(nèi)。
深度學(xué)習(xí)中通過目標(biāo)函數(shù)或者損失函數(shù)衡量當(dāng)前參數(shù)的好壞,而調(diào)整模型參數(shù)的就是優(yōu)化算法。
所謂優(yōu)化, 就是利用關(guān)于最優(yōu)解的信息,不斷逼近最優(yōu)解, 目前深度學(xué)習(xí)中最常用的是梯度下降法, 梯度方向就是最優(yōu)解的信息,因?yàn)樘荻确较蛑赶蜃顑?yōu)解方向, 沿著梯度方向前進(jìn)即可靠近最優(yōu)解。
到這里,你是不是覺得優(yōu)化算法很簡(jiǎn)單?其實(shí),不然。讓我們進(jìn)一步分析。
難點(diǎn)一:梯度(困難指數(shù)兩顆星)
所謂梯度下降法,當(dāng)然要計(jì)算梯度,前面那個(gè)復(fù)合函數(shù)再加上損失函數(shù),最終要優(yōu)化的函數(shù)是這個(gè)樣子:L(h(f(g(k(x)))),y),L是損失函數(shù),y是標(biāo)簽值。
復(fù)合函數(shù)通過鏈?zhǔn)椒▌t進(jìn)行求導(dǎo),例如f(g(x)),

這就要求g(x)和f(x)都得可導(dǎo),對(duì)于神經(jīng)網(wǎng)絡(luò)而言,卷積層和全連接層都可以看作是矩陣與向量乘法,是可導(dǎo)的,剩下的就是激活函數(shù)和損失函數(shù),好在目前常用的MSE,交叉熵?fù)p失函數(shù),Sigmoid,Relu激活函數(shù)都是可導(dǎo)的。
所以,梯度的問題不大。
難點(diǎn)二:凸優(yōu)化和非凸優(yōu)化( 困難指數(shù)五顆星 )
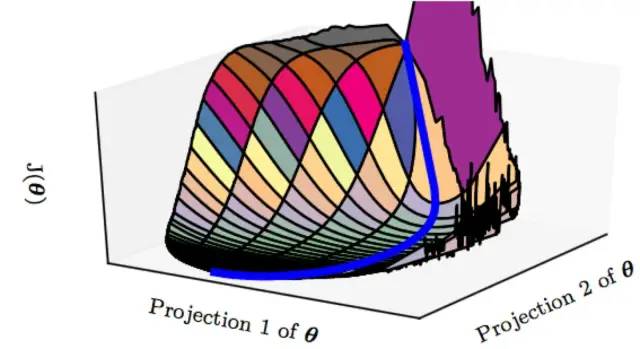
深度學(xué)習(xí)由于多個(gè)隱藏層的疊加所形成的復(fù)合函數(shù),外加損失函數(shù),最終的函數(shù)往往不是凸函數(shù)。
所謂凸函數(shù),就是只有全局最優(yōu)解,通過梯度下降最終都能找到這個(gè)最優(yōu)解,對(duì)于機(jī)器學(xué)習(xí)中的線性回歸的損失函數(shù):最小二乘而言,它是一個(gè)凸函數(shù),也就是說能找到使損失函數(shù)達(dá)到最小值的全局最優(yōu)解。
在非凸函數(shù)中,存在大量的局部最優(yōu)解,局部極值隨著特征維度的增加呈指數(shù)增長(zhǎng),優(yōu)化算法很大概率找不到全局最優(yōu)解,這也是優(yōu)化算法最苦惱的地方。
如果只有局部最優(yōu)解,那情況還不算最糟糕,畢竟局部最優(yōu)解意味著從所有維度看都是最小值或者最大值,更糟糕的是鞍點(diǎn),這種情況雖然一階導(dǎo)數(shù)都為零,但二階導(dǎo)數(shù)不同向,也就是說從某些維度看是極小值,而從某些維度看卻是極大值。
而且,不幸的是,隨著特征向量維度的增加,鞍點(diǎn)的數(shù)量也是隨著指數(shù)級(jí)增加的。
那如何逃離鞍點(diǎn)?
這里再次注意:這里我們所說的梯度下降指的是:使用全部樣本的損失的平均值來更新參數(shù),這就意味著梯度的精度非常高,會(huì)精確地逼近鞍點(diǎn),但我們不希望這樣,我們希望能夠跳出鞍點(diǎn),幸好,隨機(jī)梯度下降SGD或者其變體(比如Momentun、Adam、mini-batch)的出現(xiàn)很大程度上解決了該問題。
例如,mini-batch是指每次參數(shù)更新只是用一小批樣本,這是一種有噪聲的梯度估計(jì),哪怕我們位于梯度為0的點(diǎn),也經(jīng)常在某個(gè)mini-batch下的估計(jì)把它估計(jì)偏了,導(dǎo)致往前或者往后挪了一步摔下馬鞍,也就是mini-batch的梯度下降法使得模型很容易逃離特征空間中的鞍點(diǎn)。
既然,局部極值點(diǎn)也可接受,且又能有方法逃離鞍點(diǎn),到這里你覺得問題就結(jié)束了嗎?還沒有,其實(shí),神經(jīng)網(wǎng)絡(luò)中最讓人望而生畏的不是局部最優(yōu)點(diǎn)和鞍點(diǎn),而是平坦地區(qū),這些地區(qū)一經(jīng)進(jìn)入很難逃離。
總結(jié)來說,人們認(rèn)為的深度神經(jīng)網(wǎng)絡(luò)“容易收斂到局部最優(yōu)”,很可能是一種想象,實(shí)際情況是,我們可能從來沒有找到過“局部最優(yōu)”,更別說全局最優(yōu)了。
所以,與其擔(dān)憂陷入局部最優(yōu)點(diǎn)怎么跳出來,更不如去考慮數(shù)據(jù)集要怎么做才能讓網(wǎng)絡(luò)更好學(xué)習(xí),以及網(wǎng)絡(luò)該怎么設(shè)計(jì)才能更好的捕獲pattern,網(wǎng)絡(luò)該怎么訓(xùn)練才能學(xué)到我們想讓它學(xué)習(xí)的知識(shí)。
最后,也要為優(yōu)化算法鳴個(gè)不平。其實(shí)這并不是優(yōu)化算法的問題。是損失函數(shù)和網(wǎng)絡(luò)結(jié)構(gòu)的錯(cuò),是他們的復(fù)雜性導(dǎo)致優(yōu)化問題是一個(gè)非凸優(yōu)化問題,優(yōu)化算是是來解決問題的,而不是制造問題。
-
優(yōu)化算法
+關(guān)注
關(guān)注
0文章
35瀏覽量
9854 -
函數(shù)
+關(guān)注
關(guān)注
3文章
4371瀏覽量
64220 -
深度學(xué)習(xí)
+關(guān)注
關(guān)注
73文章
5554瀏覽量
122494
發(fā)布評(píng)論請(qǐng)先 登錄
目前主流的深度學(xué)習(xí)算法模型和應(yīng)用案例
深度學(xué)習(xí)中多種優(yōu)化算法


深度學(xué)習(xí)算法進(jìn)行優(yōu)化的處理器——NPU
PyTorch教程-12.1. 優(yōu)化和深度學(xué)習(xí)

從淺層到深層神經(jīng)網(wǎng)絡(luò):概覽深度學(xué)習(xí)優(yōu)化算法

深度學(xué)習(xí)算法簡(jiǎn)介 深度學(xué)習(xí)算法是什么 深度學(xué)習(xí)算法有哪些
深度學(xué)習(xí)算法工程師是做什么
什么是深度學(xué)習(xí)算法?深度學(xué)習(xí)算法的應(yīng)用
深度學(xué)習(xí)算法的選擇建議
深度學(xué)習(xí)算法庫框架學(xué)習(xí)
深度學(xué)習(xí)框架和深度學(xué)習(xí)算法教程
深度學(xué)習(xí)編譯工具鏈中的核心——圖優(yōu)化





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論