") 嵌入式軟件架構(gòu)設(shè)計之消息交互
嵌入式軟件架構(gòu)設(shè)計之消息交互
前言
在熟悉任務(wù)調(diào)度、程序分層和模塊化編程關(guān)于軟件架構(gòu)、分層和模塊設(shè)計后,除了函數(shù)調(diào)用設(shè)計中出現(xiàn)的情況外,還會遇到同層模塊之前如何進行消息交互,通常是應(yīng)用層之間。
比如一個設(shè)備通過架構(gòu)設(shè)計包含人機交互應(yīng)用層模塊(一般會調(diào)用按鍵和顯示屏等功能驅(qū)動模塊)和通信應(yīng)用層模塊(一般調(diào)用串口、CAN和網(wǎng)絡(luò)ESP8266等功能驅(qū)動模塊),兩個同層之間的模塊如果需要互傳數(shù)據(jù),一般都是調(diào)用各自頭文件提供的接口(模塊對外提供的接口盡量不要使用全局變量,防止其他模塊擅自修改),這樣就造成了耦合。
設(shè)計思路
上述情況,也可以采用回調(diào)函數(shù)的實現(xiàn)方式進行模塊解耦,但是需要引入新的內(nèi)容,即公共模塊Commoon層(包含第三方功能庫)。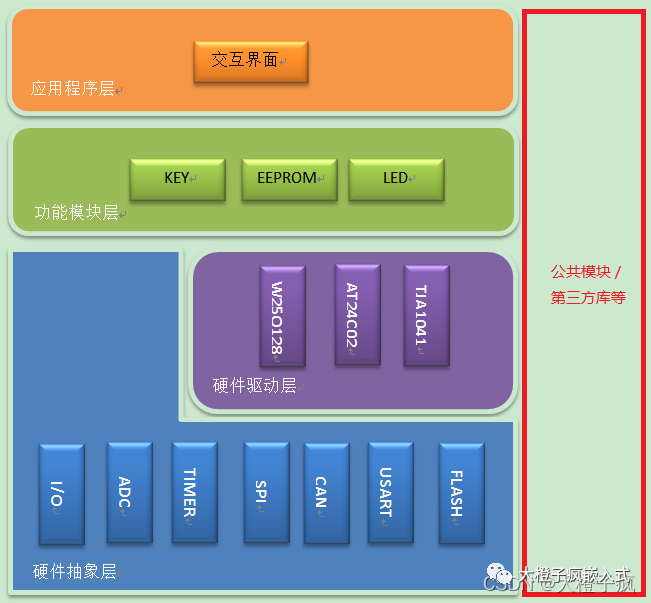
公共模塊主要有各模塊都需要使用的類型定義、結(jié)構(gòu)體定義、通用函數(shù)或常用宏定義等(通常屬于基礎(chǔ)類的功能,不會受功能需求和不同平臺的影響)。
基于公共模塊,為了解決各模塊之前的數(shù)據(jù)交互,可以通過公共模塊實現(xiàn)基礎(chǔ)類的功能達到各應(yīng)用層模塊解耦的目的。
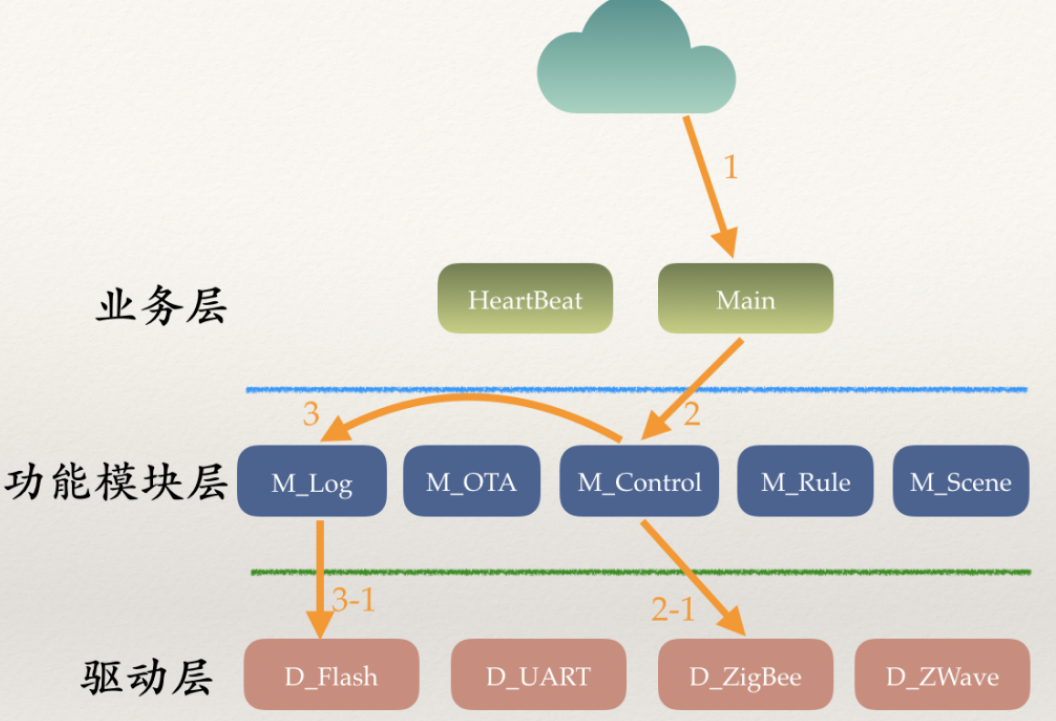
參考消息隊列的方式,可以實現(xiàn)一個生產(chǎn)者/消費者的功能模塊(這種可以稱作觀察者模式,即存在觀察者和被觀察者),即某一模塊更新數(shù)據(jù)后,其他模塊可以第一時間得到通知更新(采用回調(diào)函數(shù)的方式實現(xiàn))
看圖:
Callback是一個指針數(shù)組變量,每個數(shù)組成員都是函數(shù)指針類型的變量,通過函數(shù)Notify_Attach拿到了應(yīng)用層代碼函數(shù)OnSaveParam(...)和OnUpdateParam(...)的函數(shù)地址,之后人機交互模塊調(diào)用了Notify_EventNotify,從而調(diào)用Callback,調(diào)用方式和直接調(diào)用OnFunction(...)存在些許差異,因為是數(shù)組,所有需要[]取函數(shù)地址,為了保證系統(tǒng)運行安全,調(diào)用前要確保Callback[i]不為NULL,否則會引起程序異常。
從上述看,也許有人感覺這樣處理反而復(fù)雜了,直接調(diào)用不香嗎?(上述人機交互模塊屬于被觀察者,參數(shù)和其他模塊屬于觀察者)
有以下幾個好處:
- 避免各模塊相互調(diào)用,可完成解耦
- 即使 觀察者 模塊其中一個被移除,也不用修改 被觀察者 或者 其他觀察者 代碼,保證系統(tǒng)穩(wěn)定
- 新增一個 觀察者 模塊,也不需要修改 被觀察者 代碼,保證系統(tǒng)穩(wěn)定
當(dāng)然這種方式也有缺點:
- 如果回調(diào)函數(shù)過多,或者某一個 觀察者 的回調(diào)函數(shù)執(zhí)行時間很長,肯定會影響到其他觀察者 模塊的通知時間,甚至影響 被觀察者 模塊的正常運行
- 如果 觀察者 和 被觀察者 之間有循環(huán)依賴,就會導(dǎo)致他們循環(huán)調(diào)用,導(dǎo)致系統(tǒng)死機
避免方式:
- 回調(diào)函數(shù)中一定要保證執(zhí)行的時間短,不能有執(zhí)行時間長的功能,甚至延時(一般回調(diào)中處理數(shù)據(jù)更新等執(zhí)行時間短的即可,數(shù)據(jù)更新后的需要花時間處理的可以在主循環(huán)執(zhí)行)
- 觀察者回調(diào)函數(shù)中盡量避免執(zhí)行其他觀察者的回調(diào)函數(shù),防止循環(huán)調(diào)用
示例代碼
下面簡單實現(xiàn)人機交互模塊在某種情況下需要保存參數(shù),具體如何保存參數(shù)由參數(shù)模塊實現(xiàn),人機交互模塊通過事件通知模塊告知參數(shù)模塊需要保存數(shù)據(jù)。
初步來看,可能中間多了一個,嫌實現(xiàn)麻煩,不如直接調(diào)用;但是從后期功能擴展和解耦來看,這是很有必要的。
事件通知模塊
頭文件定義
#ifndef _NOTIFY_H_
#define _NOTIFY_H_
#include 源文件實現(xiàn)
#include "notify.h"
#include 參數(shù)應(yīng)用層模塊
示例通信,作為觀察者監(jiān)聽參數(shù)保存的消息。
#include "notify.h"
static int Param_OnNotifyProc(NotifyId_e id, NotifyEvent_e eEvent, const void *pData, uint32_t length);
void Param_Init(void)
{
Notify_Attach(NOTIFY_ID_SYS_PARAM, NOTIFY_EVENT_PARAM_UPDATE, Param_OnNotifyProc);
}
// 事件回調(diào)處理
int Param_OnNotifyProc(NotifyId_e id, NotifyEvent_e eEvent, const void *pData, uint32_t length)
{
switch (eEvent)
{
case NOTIFY_EVENT_PARAM_UPDATE:
{
PrramUpdateInfo_t *pInfo = (PrramUpdateInfo_t *)pData;
SaveParam(pInfo->addr, pInfo->param);// 保存參數(shù)
}
break;
default:
break;
}
return 0;
}
人機交互應(yīng)用層模塊
示例通信,作為被觀察者通知/發(fā)送參數(shù)保存的消息。
#include "notify.h"
void Hmi_Init(void)
{
}
// 需要保存參數(shù)
int Hmi_SaveProc(void)
{
ParamUpdateInfo_t info;
info.addr = 5;
info.param = 20;
Notify_EventNotify(NOTIFY_ID_HMI, NOTIFY_EVENT_HMI_UPDATE, &info, sizeof(ParamUpdateInfo_t));
}
-
軟件架構(gòu)
+關(guān)注
關(guān)注
0文章
64瀏覽量
10464 -
任務(wù)調(diào)度
+關(guān)注
關(guān)注
0文章
27瀏覽量
10034 -
模塊化編程
+關(guān)注
關(guān)注
4文章
17瀏覽量
7802
發(fā)布評論請先 登錄
嵌入式系統(tǒng)的軟件架構(gòu)設(shè)計!
為何要進行嵌入式軟件架構(gòu)設(shè)計?如何設(shè)計?
嵌入式軟件架構(gòu)設(shè)計的目的及思路
對嵌入式系統(tǒng)中的架構(gòu)設(shè)計的理解
決定嵌入式系統(tǒng)軟件架構(gòu)的因素和架構(gòu)的影響
嵌入式軟件架構(gòu)設(shè)計的資料大合集
嵌入式軟件架構(gòu)設(shè)計資料分享
探究嵌入式開發(fā)是否需要架構(gòu)設(shè)計?
嵌入式開發(fā)需要架構(gòu)設(shè)計嗎?

嵌入式系統(tǒng)軟件架構(gòu)設(shè)計
系統(tǒng)架構(gòu)設(shè)計筆記(59)—— 嵌入式系統(tǒng)的組成





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論