") 滾動橡膠輪胎的模態(tài)仿真
滾動橡膠輪胎的模態(tài)仿真
一、寫在文前
滾動輪胎模態(tài)仿真實際上是在輪荷加載的基礎之上的重啟動分析。輪胎在穩(wěn)態(tài)滾動過程中,會受到預加載荷、慣性力以及輪胎和地面的摩擦力的影響,這些力會對整個系統(tǒng)的剛度矩陣和阻尼矩陣產生影響,導致非對稱性。故不能采用常規(guī)方法對動力學方程進行解耦,必須用復模態(tài)來解耦,所以滾動輪胎的模態(tài)仿真其實是復模態(tài)的的提取。
在abaqus的穩(wěn)態(tài)滾動中,輪胎實際上是不滾動的,只是內部材料的流動(歐拉-拉格朗日法)。在提取復模態(tài)之前,必須保證輪胎滾動的轉速和線速度相匹配,故需先進行roll tire仿真調試:
roll tire計算中,先給定輪胎線速度、轉動角速度然后提取輪胎輪心的力矩M,當輪胎穩(wěn)態(tài)滾動的時候, 輪胎輪心的力矩M應該為0。在實際操作中,需要不斷的調節(jié)定義的ω值,使最終繞Y向的力矩M在[-10,10]之內。
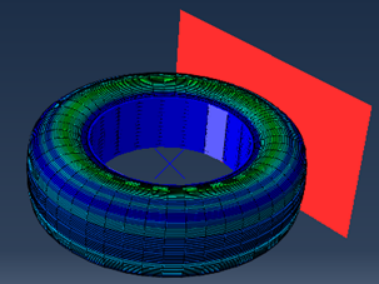
進行roll tire計算時,首先進行step1二維輪胎充氣仿真計算,然后進行step2rev旋轉3D輪胎生成及輪荷加載計算,在此基礎上進行Free roll計算Inp文件的編寫,進行計算,查看輪胎輪心的力矩M判斷輪胎是否處于穩(wěn)態(tài)滾動狀態(tài)。下圖為step1.inp以及step2rev.inp運行結果圖: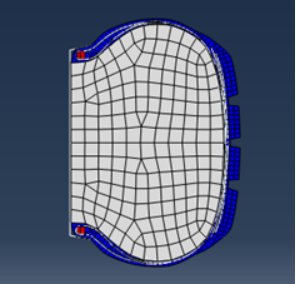
二、rolltire計算
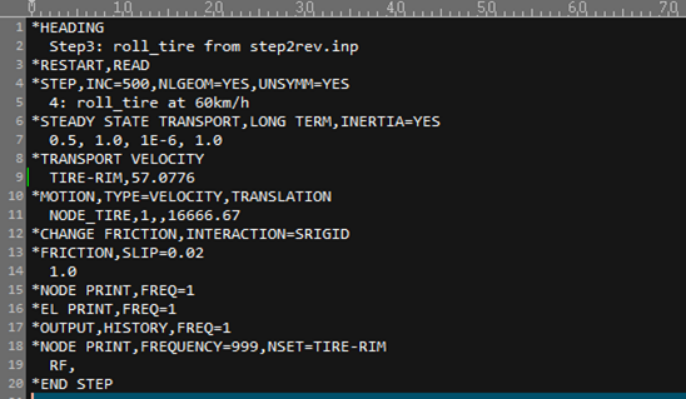
step3roll_tire.inp文件編寫如下:
*HEADING(重啟動分析) Step3: roll_tire from step2rev.inp*RESTART,READ*STEP,INC=500,NLGEOM=YES,UNSYMM=YES(幾何非線性打開;非對稱打開)4: roll_tire at 60km/h*STEADY STATE TRANSPORT,LONG TERM,INERTIA=YES(動態(tài)分析,不考慮粘塑性影響,慣性打開) 0.5, 1.0, 1E-6, 1.0*TRANSPORT VELOCITY(初始角速度=V/r) TIRE-RIM,57.0776*MOTION,TYPE=VELOCITY,TRANSLATION(線速度V) NODE_TIRE,1, (方向為1),16666.67(60公里每小時化為毫米/S)*CHANGE FRICTION,INTERACTION=SRIGID(改變摩擦系數)*FRICTION,SLIP=0.02 1.0*NODE PRINT,FREQ=1*EL PRINT,FREQ=1*OUTPUT,HISTORY,FREQ=1*NODE PRINT,FREQUENCY=999,NSET=TIRE-RIM RF, (輸出輪心的力矩)*END STEP
將上述所編寫的inp文件命名為step3roll_tire.inp并保存至step2rev.inp運算結果所在文件夾,在文件夾空白處單擊右鍵選擇“在此處打開命令窗口”,輸入:
abaqus job=step3roll_tire oldjob=step2rev int cpus=4
點擊回車運行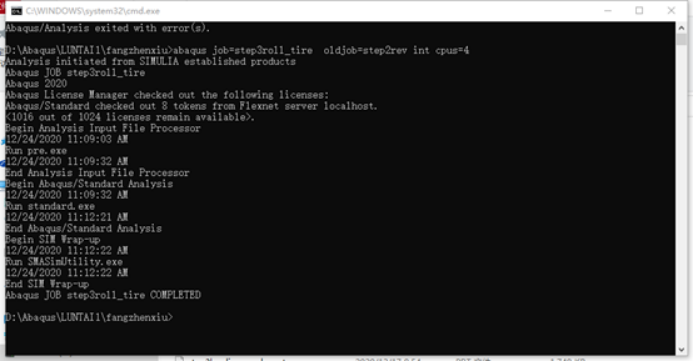 ?
?
計算完成后可出現(xiàn)以下幾個文件: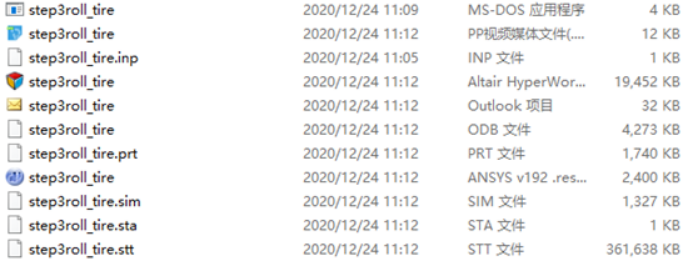 ?
?
其中: 提交計算文件的語法錯誤信息在.dat文件中查看; 提交計算文件的計算步長在.sta文件中查看; 所得計算結果的.odb文件可在Hyper view或Abaqus中查看;
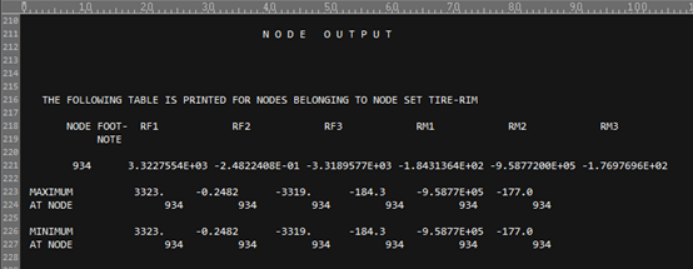
因我們需要的是輪胎輪心的力矩M: ?
?
故用UE打開step3roll_tire.dat文件查看NODE OUTPUT: 因我們需要的是繞Y向的力矩M(RM2)在[-10,10]之內,這時才算穩(wěn)態(tài)滾動,而輸出值RM2為-9.5877E 05故需調整ω值,使最終繞Y向的力矩M在[-10,10]之內。在此大家自己調試即可。
 ?
?
三、滾動輪胎模態(tài)提取
在ABAQUS/STANDARD中,復模態(tài)的提取采用子空間投影法,而且在復模態(tài)提取之前,一般先進行具有對稱剛度矩陣的無阻尼系統(tǒng)的特征值和特征模態(tài)計算。
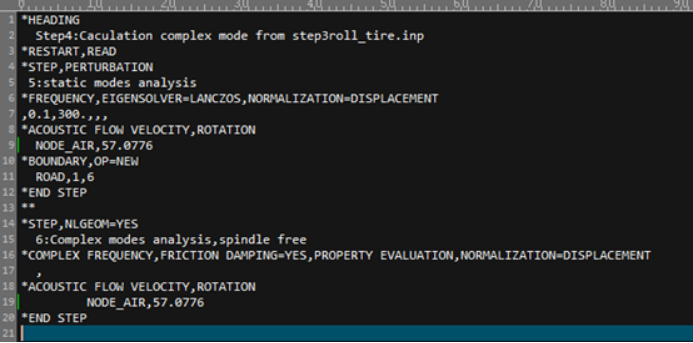
滾動輪胎模態(tài)提取inp文件編寫如下:
*HEADING Step4:Caculation complex mode from step3roll_tire.inp *RESTART,READ *STEP,PERTURBATION 5:static modes analysis *FREQUENCY,EIGENSOLVER=LANCZOS,NORMALIZATION=DISPLACEMENT(實模態(tài)提取) ,0.1,300.,,, *ACOUSTIC FLOW VELOCITY,ROTATION(定義流體聲腔的角速度) NODE_AIR,57.0776 *BOUNDARY,OP=NEW ROAD,1,6(路面全約束) *END STEP ** *STEP,NLGEOM=YES 6:Complex modes analysis,spindle free *COMPLEX FREQUENCY,FRICTION DAMPING=YES,PROPERTY EVALUATION,NORMALIZATION=DISPLACEMENT(復模態(tài)提取) , *ACOUSTIC FLOW VELOCITY,ROTATION NODE_AIR,57.0776 *END STEP
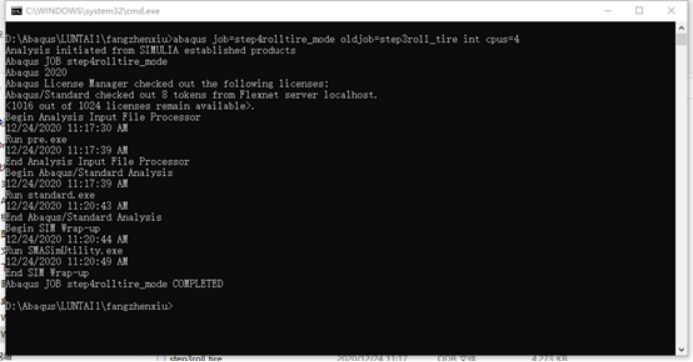
將上述所編寫的inp文件命名為step4rolltire_mode.inp并保存至step3roll_tire.inp運算結果所在文件夾,在文件夾空白處單擊右鍵選擇“在此處打開命令窗口”,輸入:
abaqus job=step4rolltire_mode oldjob=step3roll_tire int cpus=4點擊回車運行
 ?
?計算完成后可出現(xiàn)以下幾個文件:
 ?
?其中:
提交計算文件的語法錯誤信息在.dat文件中查看;
提交計算文件的計算步長在.sta文件中查看;
所得計算結果的.odb文件可在Hyper view或Abaqus中查看;
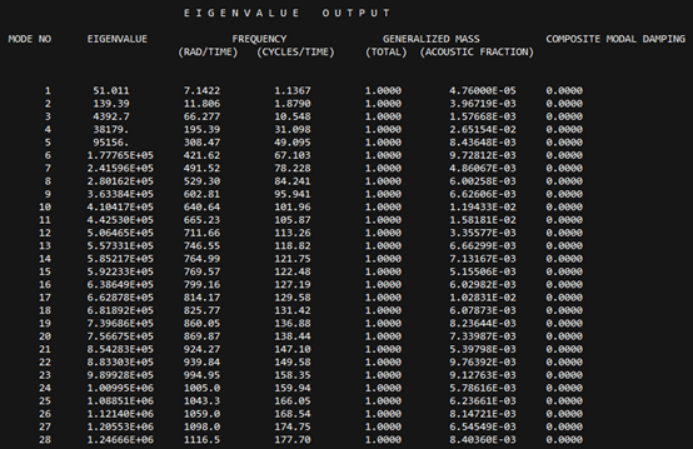
現(xiàn)用UE打開step4rolltire_mode.dat文件可得滾動輪胎的實模態(tài)頻率如下:
 ?
?
復模態(tài)頻率如下: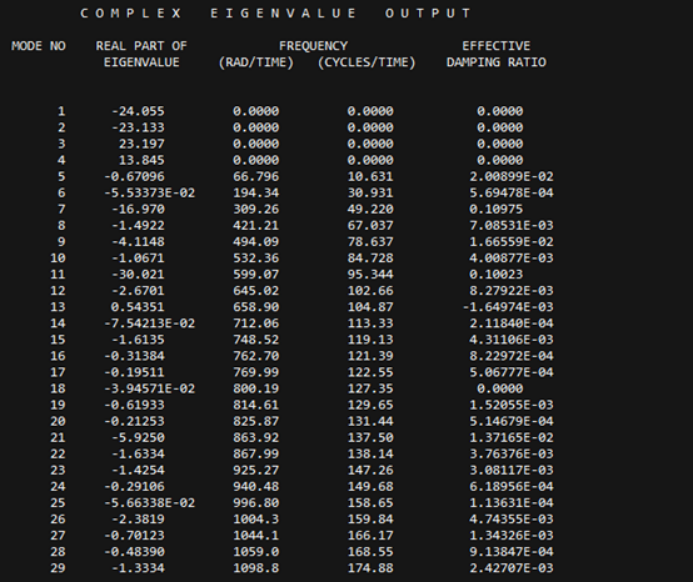 ?
?
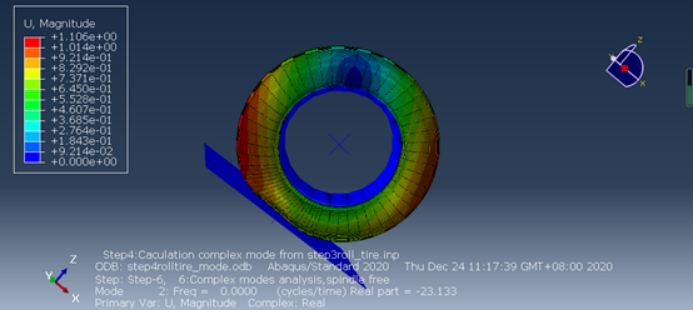
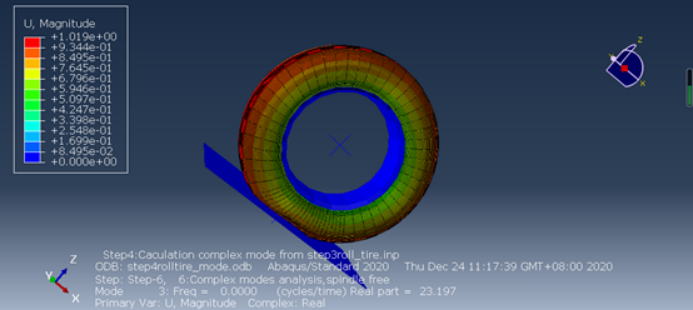
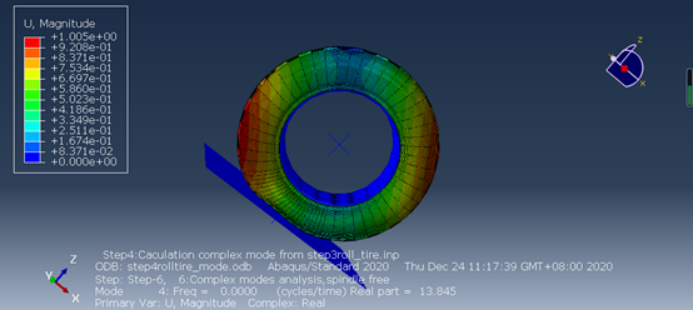
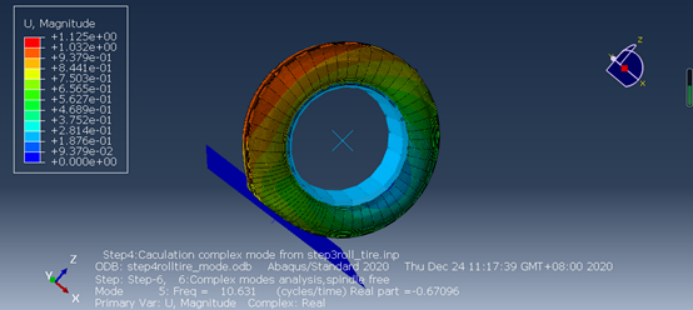
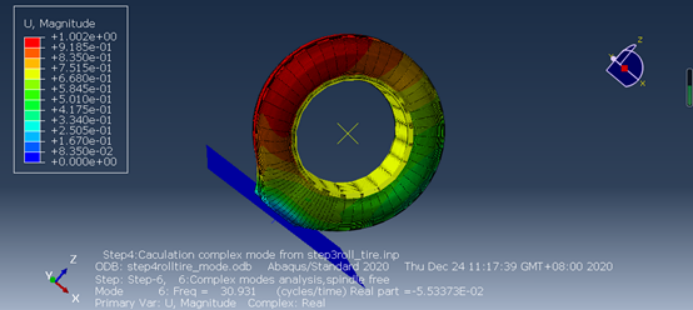
(注:step4rolltire_mode.inp是基于上文step3roll_tire.inp進行運算的,沒有進行ω值的調試,故上復模態(tài)頻率不作為參考依據,下只呈現(xiàn)實模態(tài)振型云圖,大家可后續(xù)進行ω值的,使繞Y向的力矩M在[-10,10]之內再進行復模態(tài)頻率的提取)
在Abaqus中打開step4rolltire_mode的ODB文件可得: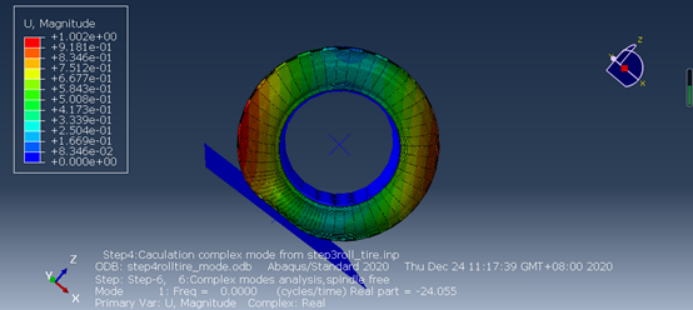
審核編輯:劉清
-
Standard
+關注
關注
0文章
12瀏覽量
7468 -
ABAQUS
+關注
關注
1文章
59瀏覽量
13945
原文標題:滾動橡膠輪胎模態(tài)仿真到底怎么做?
文章出處:【微信號:sim_ol,微信公眾號:模擬在線】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
橡膠工業(yè)密度監(jiān)測物聯(lián)網解決方案
羅克韋爾自動化亮相2025年全國輪胎行業(yè)會員大會
圓滿收官丨廣饒輪胎展,期待再相逢

電機聯(lián)軸控制的旋轉機械定轉子模態(tài)分析
倍加福WCS絕對位置定位系統(tǒng)在輪胎行業(yè)的應用
是德示波器滾動模式設置指南
越南《汽車用氣動輪胎技術法規(guī)》草案

有必要開發(fā)電動車專用輪胎嗎
模態(tài)分解合集matlab代碼
熱重分析儀在橡膠檢測中的應用案例

RFID技術引領輪胎行業(yè)數字化變革
輪胎試驗臺架遠程監(jiān)控物聯(lián)網解決方案

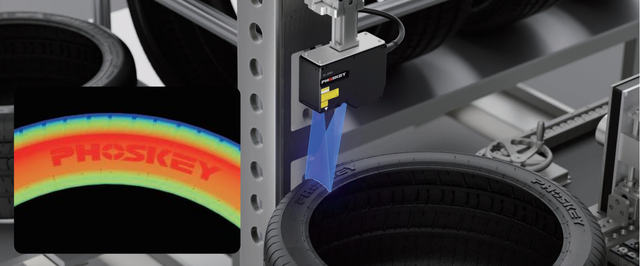
3D線激光位移傳感器檢測案例 精密“胎檢”保安全,輪胎質量檢測
在低溫下對小尺度丁苯橡膠進行納米壓痕的動態(tài)力學分析






 工商網監(jiān)
工商網監(jiān)
評論