") Windows實(shí)時(shí)運(yùn)動(dòng)控制軟核(七):LOCAL高速接口測(cè)試之Labview
Windows實(shí)時(shí)運(yùn)動(dòng)控制軟核(七):LOCAL高速接口測(cè)試之Labview
今天,正運(yùn)動(dòng)小助手給大家分享一下MotionRT7的安裝和使用,以及使用Labview對(duì)MotionRT7開發(fā)的前期準(zhǔn)備。
01 MotionRT7簡(jiǎn)介
MotionRT7是深圳市正運(yùn)動(dòng)技術(shù)推出的跨平臺(tái)運(yùn)動(dòng)控制實(shí)時(shí)內(nèi)核,也是國(guó)內(nèi)首家完全自主自研,自主可控的Windows運(yùn)動(dòng)控制實(shí)時(shí)軟核。

1.MotionRT7具備以下特點(diǎn)
(1)獨(dú)立軟件安裝,適合各種Windows電腦;綠色免安裝,快速體驗(yàn);采用硬件綁定的運(yùn)行許可證授權(quán)(未授權(quán)也可試用);可以方便配置、啟動(dòng)、連接、模擬運(yùn)行等。
(2)與MotionRT其它版本功能兼容,一次開發(fā),可快速切換到嵌入式,Linux各種平臺(tái)。
(3)統(tǒng)一函數(shù)庫(kù)接口,快速的本地LOCAL接口,運(yùn)動(dòng)函數(shù)調(diào)用快至us級(jí)別,比普通PCI卡快數(shù)十倍。
(4)集成機(jī)器視覺,快速搭建各類運(yùn)動(dòng)控制+機(jī)器視覺的實(shí)時(shí)應(yīng)用。
(5)強(qiáng)大多卡功能,最多240軸聯(lián)動(dòng),支持跨卡聯(lián)動(dòng),脈沖與總線聯(lián)動(dòng),振鏡與平臺(tái)聯(lián)動(dòng),輕松實(shí)現(xiàn)位置鎖存/PSO等高級(jí)功能。
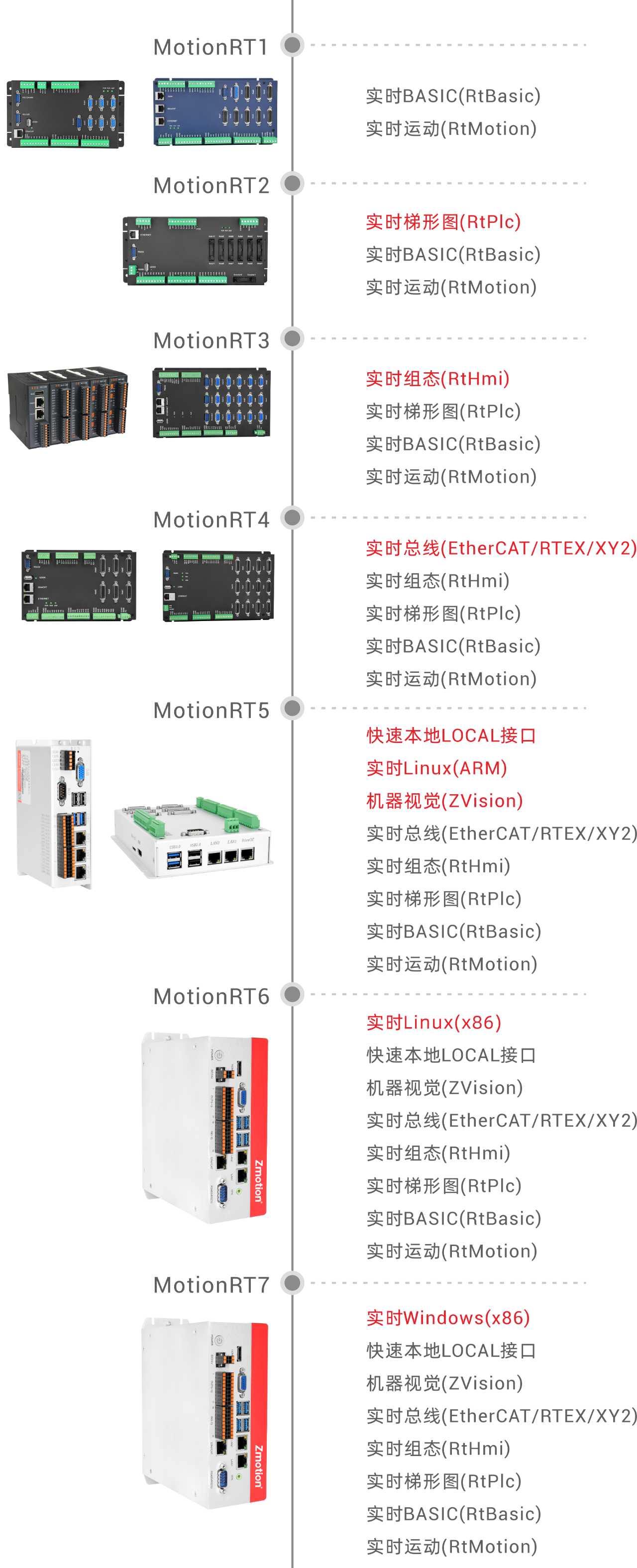
2.持續(xù)迭代的運(yùn)動(dòng)控制實(shí)時(shí)內(nèi)核MotionRT
MotionRT是正運(yùn)動(dòng)技術(shù)持續(xù)建設(shè)與發(fā)展的運(yùn)動(dòng)控制實(shí)時(shí)內(nèi)核,已不斷迭代7代,從MotionRT1到MotionRT7。
3.MotionRT7采用模塊化軟件架構(gòu)
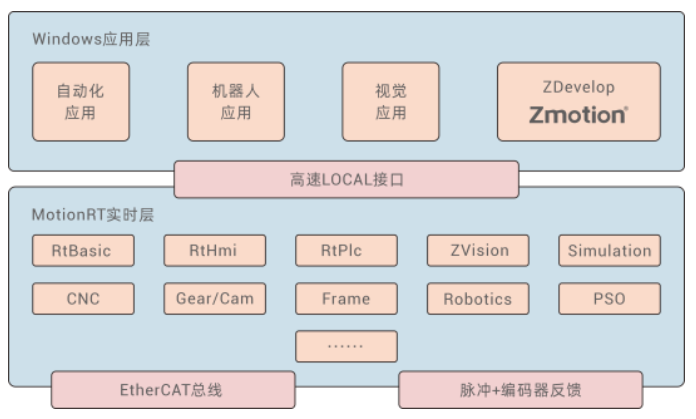
運(yùn)動(dòng)控制程序、視覺算法、MotionRT7運(yùn)動(dòng)控制引擎,通過高共享內(nèi)存進(jìn)行數(shù)據(jù)交互,大大提升運(yùn)動(dòng)控制與機(jī)器視覺的交互效率。用戶自定義功能,融合Gmc、Gear/Cam、Frame、Robotics、CNC等算法,打造用戶的專用控制系統(tǒng)。
4.統(tǒng)一開放的API函數(shù)
統(tǒng)一完善的SDK庫(kù),所有的第三方開發(fā)環(huán)境同用一套API接口,跨平臺(tái)的產(chǎn)品架構(gòu),提高效率,保持兼容性。
5.簡(jiǎn)單易用的運(yùn)動(dòng)控制功能特性
a.點(diǎn)位運(yùn)動(dòng)、直線插補(bǔ)、圓弧插補(bǔ)、螺旋插補(bǔ)、連續(xù)軌跡加工;
b.電子凸輪、電子齒輪、同步跟隨、位置鎖存、虛擬軸疊加;
c.S曲線加減速,SS曲線加減速,軌跡運(yùn)動(dòng)更柔和;
d.1D/2D/3D高速位置同步輸出PS0,充分滿足視覺飛拍、高速點(diǎn)膠、激光加工;
e.客戶可自定義運(yùn)動(dòng)控制算法或者機(jī)器人正反解算法;
f.方便與第三方視覺配合。
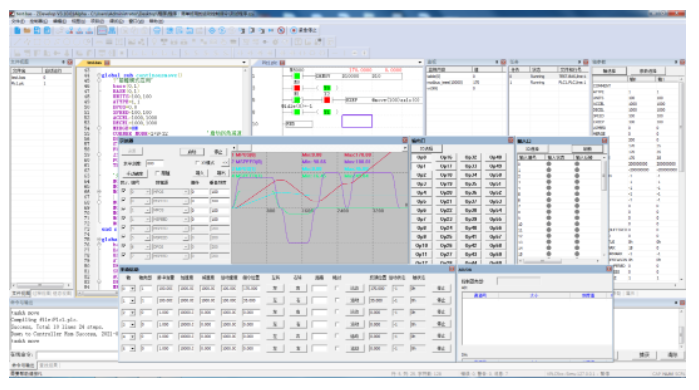
6.開放的EtherCAT與配置調(diào)試工具
ZDevelop具備開放易用的配置,開發(fā),調(diào)試,診斷等工具。ZDevelop不僅是個(gè)綠色免費(fèi)的軟件,而且具備軸調(diào)試,軸狀態(tài),示波器等工具。
MotionRT7廣泛支持EtherCAT總線,支持市面上廣泛易用的EtherCAT伺服,EtherCAT步進(jìn),EtherCAT IO,EtherCAT閥島和EtherCAT傳感器。
我司后續(xù)將持續(xù)完善EtherCAT的配置工具,持續(xù)努力做最好用的運(yùn)動(dòng)控制。
02 MotionRT7的安裝和使用
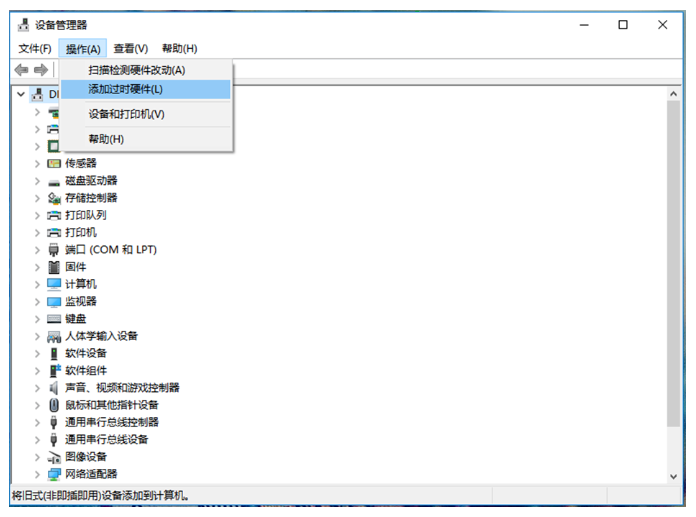
第一步:安裝驅(qū)動(dòng)程序
1.打開“設(shè)備管理器”,選擇“操作”中的“添加過時(shí)硬件”,選擇“手動(dòng)選擇”。

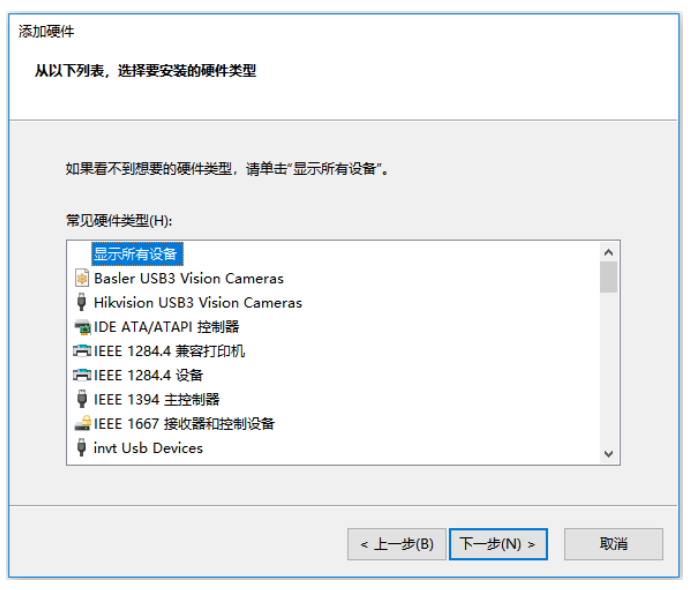
2.點(diǎn)擊“下一步”。
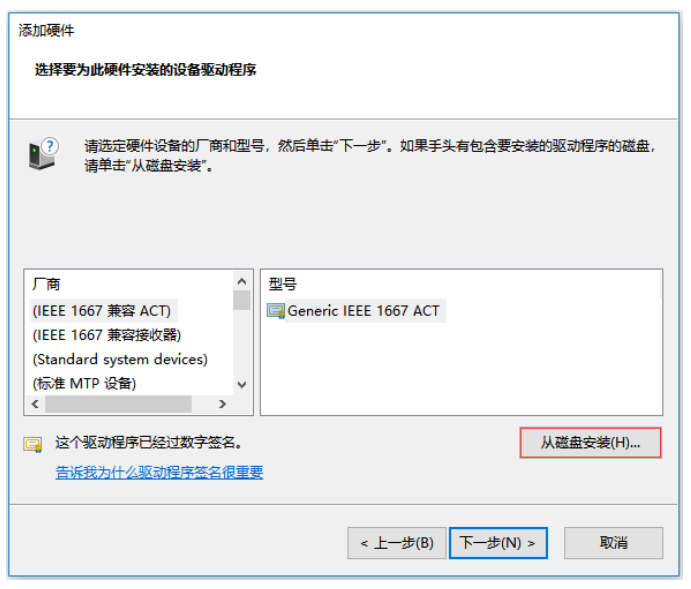
3.點(diǎn)擊“從磁盤安裝”。
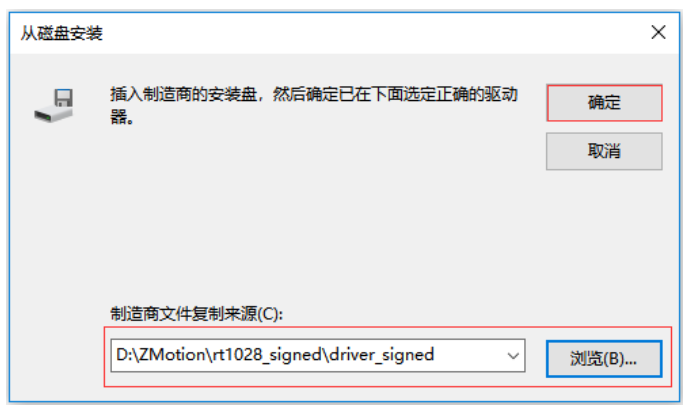
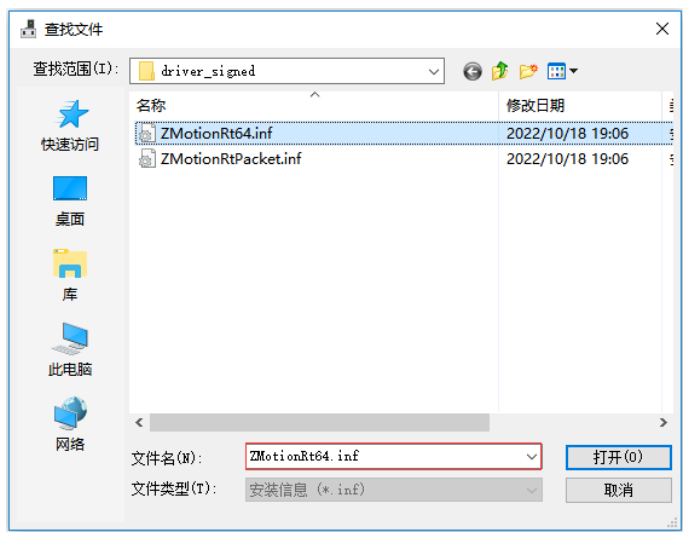
4.點(diǎn)擊“瀏覽按鈕”選擇驅(qū)動(dòng)所在的路徑,打開文件夾“driver_signed”,選擇“ZMotionRt64.inf”。
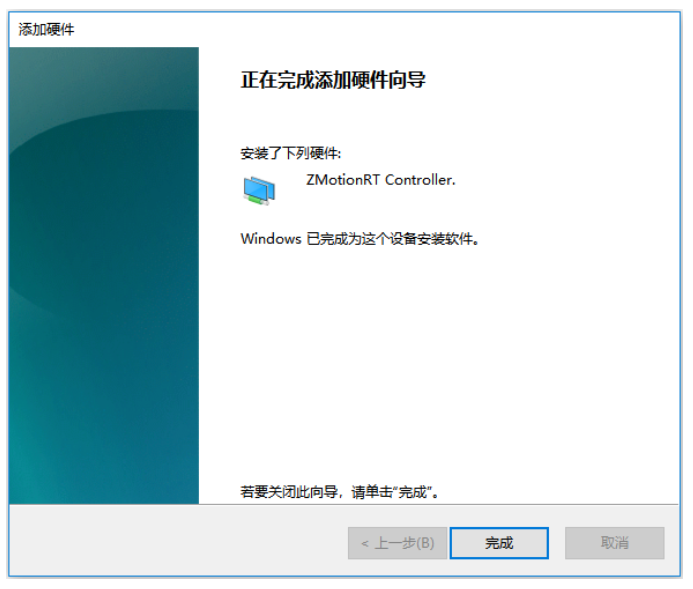
5.一直點(diǎn)擊下一步,直到安裝完成。
注意:驅(qū)動(dòng)更新時(shí),要從設(shè)備管理器刪除設(shè)備,一定要選擇把驅(qū)動(dòng)文件也刪除。
第二步:運(yùn)行控制臺(tái)程序
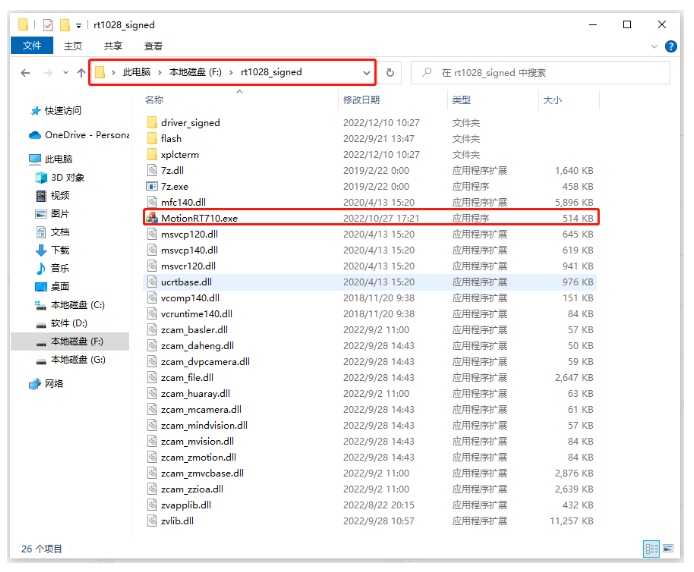
1.打開控制臺(tái)程序所在位置,運(yùn)行可執(zhí)行文件“MotionRt710.exe”。
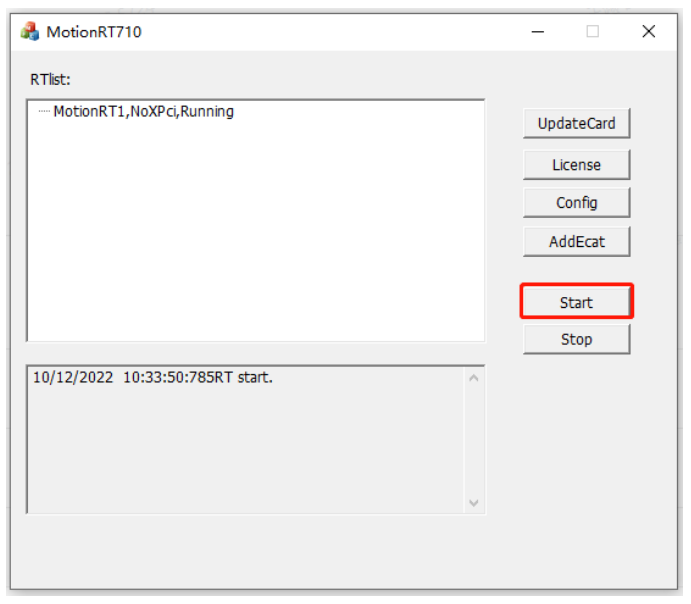
2.點(diǎn)擊“Start”。
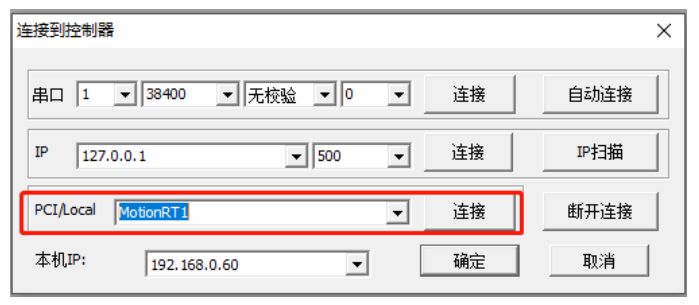
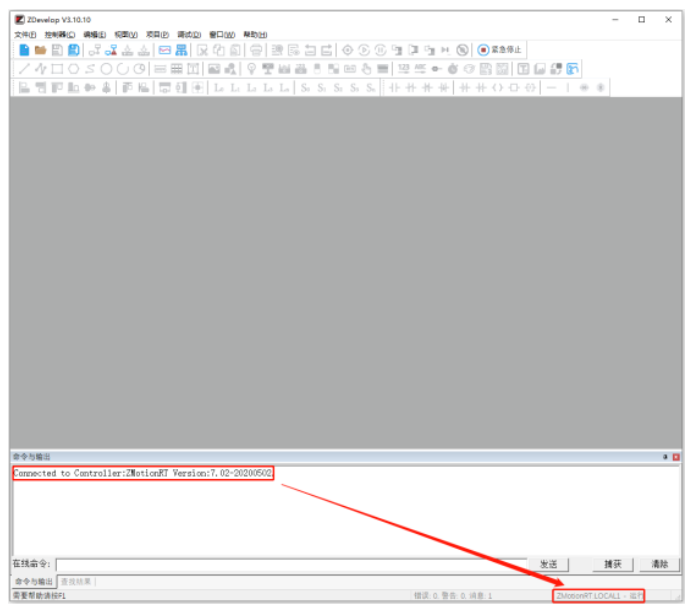
第三步:使用ZDevelop軟件鏈接到控制器,進(jìn)行參數(shù)監(jiān)控
ZDevelop鏈接控制器,軟件版本3.10以上,使用PCI/LOCAL方式進(jìn)行連接。
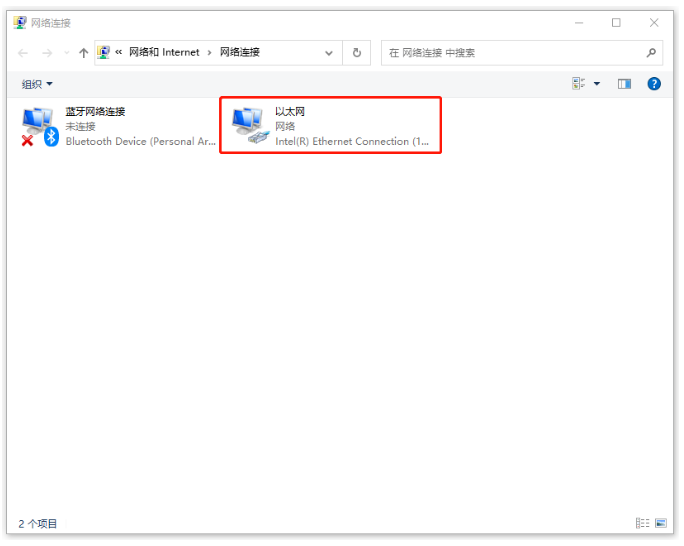
第四步:網(wǎng)口擴(kuò)展EtherCAT主站協(xié)議
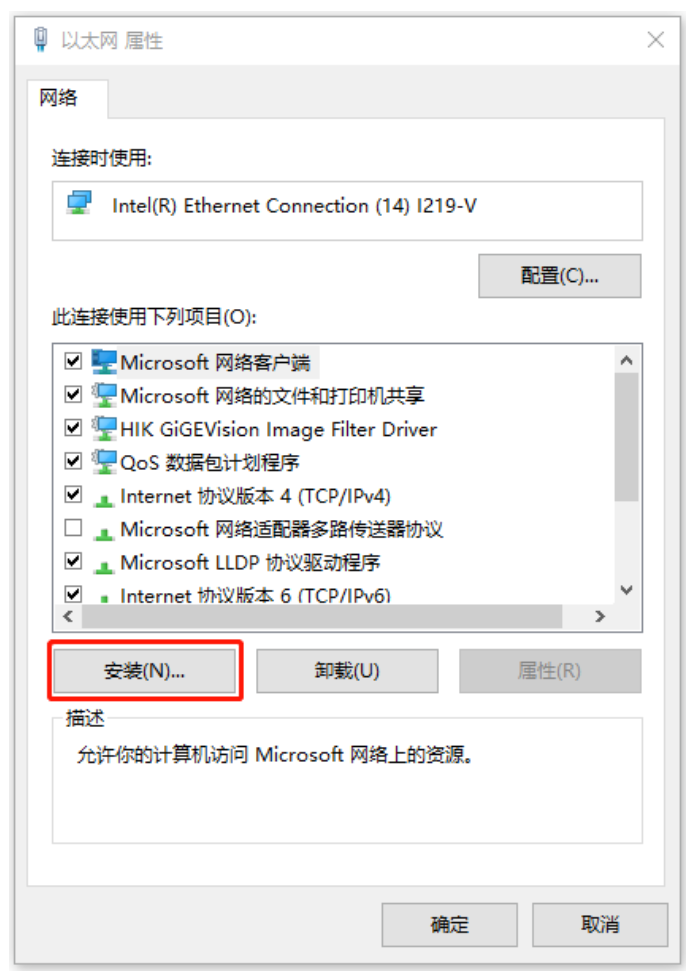
1.查看網(wǎng)絡(luò)連接。
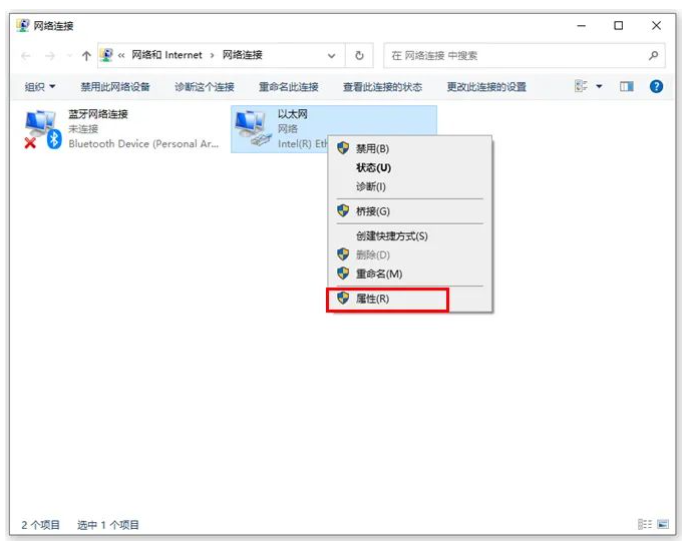
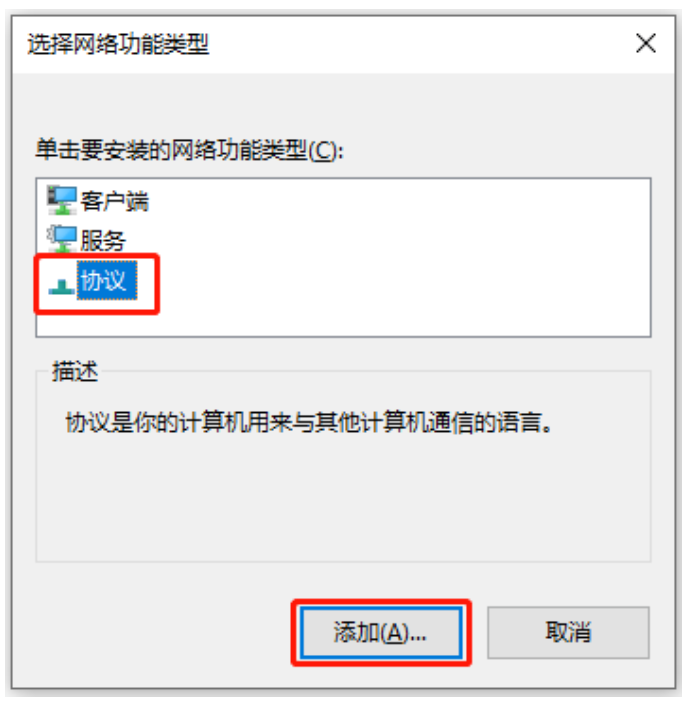
2.選擇用作EtherCAT的網(wǎng)卡,右鍵屬性,安裝協(xié)議。
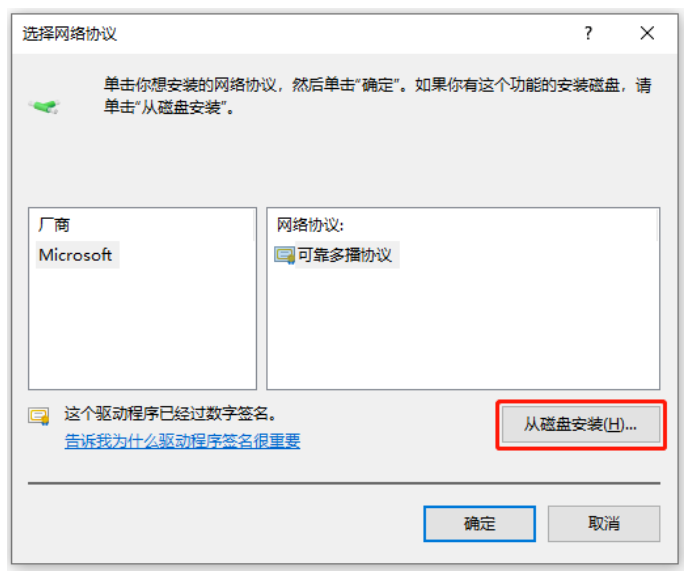
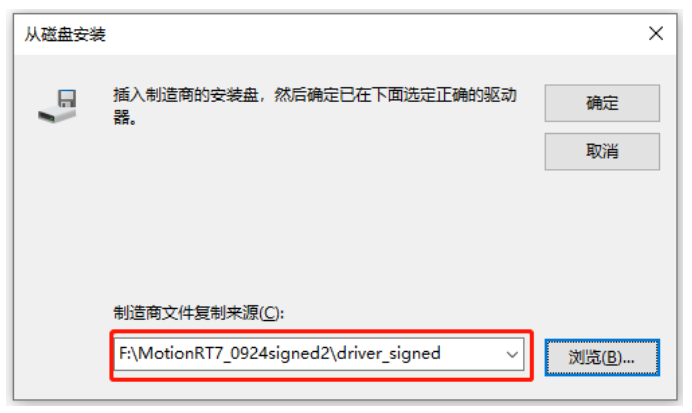
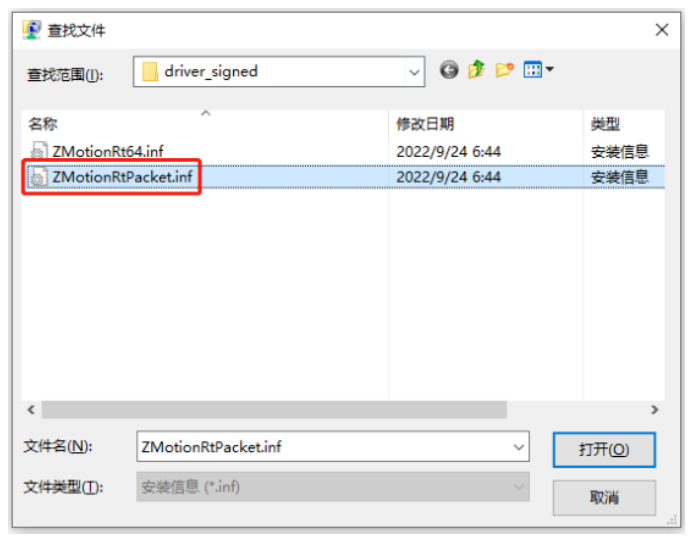
3.點(diǎn)擊從磁盤安裝,選擇驅(qū)動(dòng)器所在的路徑,打開文件夾”driver_signed”,選擇“MotionRtPacket.inf”。
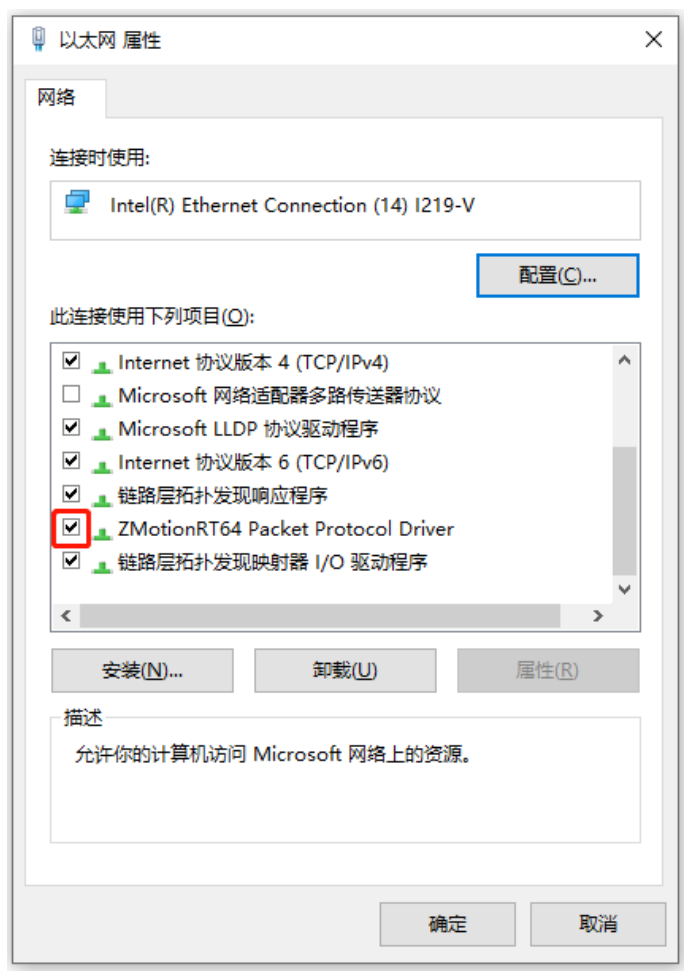
4.安裝成功后,確認(rèn)ZMotionRT64 Packet Protocol Driver前面有選上。
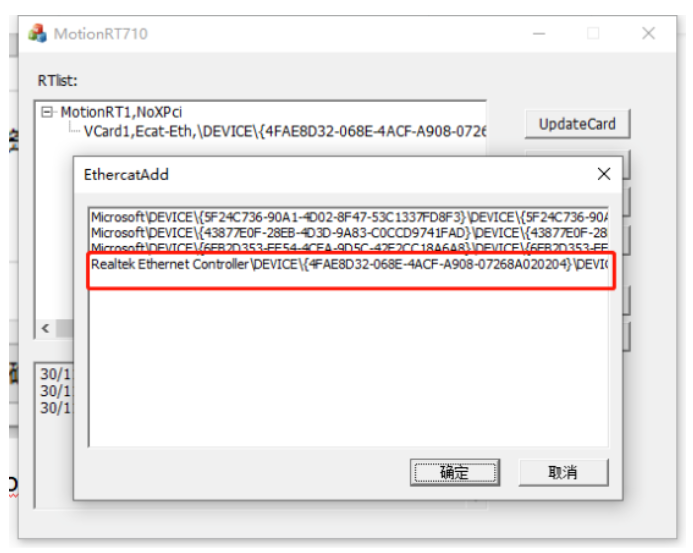
在RT控制臺(tái)程序選擇增加AddEcat,這時(shí)能看到對(duì)應(yīng)網(wǎng)卡,選擇后,啟動(dòng)RT。
自帶PC網(wǎng)卡EtherCAT具有一定的實(shí)時(shí)性,若EtherCAT要提升性能,則需要把網(wǎng)口其它的協(xié)議都去掉以提升實(shí)時(shí)性。
如需進(jìn)一步提升實(shí)時(shí)性,請(qǐng)使用正運(yùn)動(dòng)專門的EtherCAT運(yùn)動(dòng)控制卡XPCIE1032。
更多關(guān)于MotionRT7的參數(shù)設(shè)置以及相關(guān)問題,請(qǐng)參照“MotionRT7說明書”。
相關(guān)資料請(qǐng)前往正運(yùn)動(dòng)技術(shù)官網(wǎng)www.zmotion.com.cn或聯(lián)系正運(yùn)動(dòng)相關(guān)人員。
03 Labview進(jìn)行MotionRT7項(xiàng)目的開發(fā)
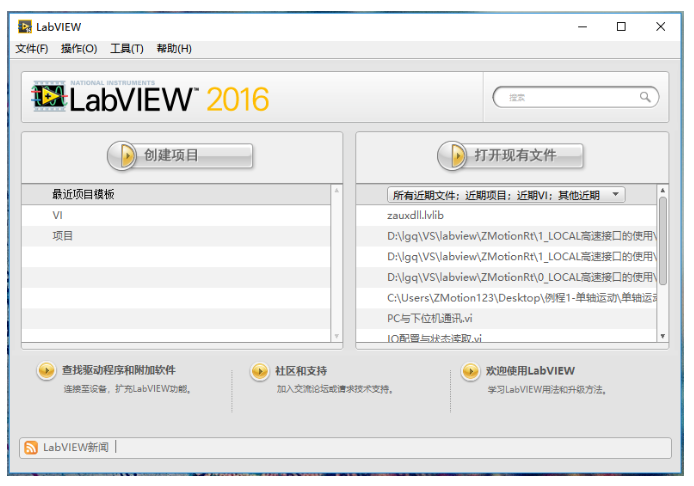
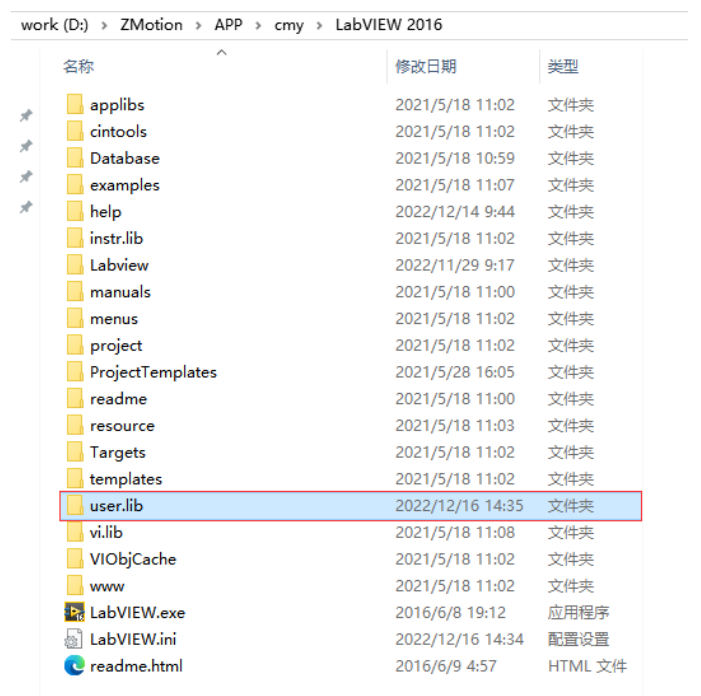
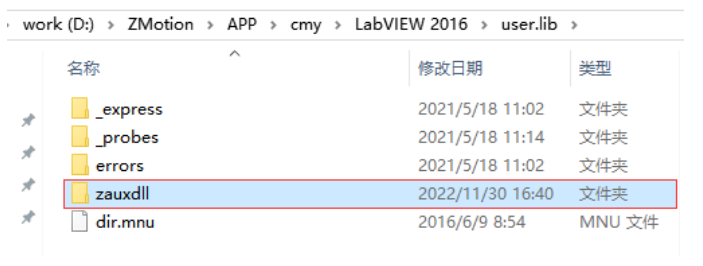
1.創(chuàng)建Labview項(xiàng)目。
2.將zauxdll函數(shù)庫(kù)放在Labview安裝路徑labview/user.lib文件夾內(nèi),zauxdll函數(shù)庫(kù)可聯(lián)系正運(yùn)動(dòng)相關(guān)人員獲取。
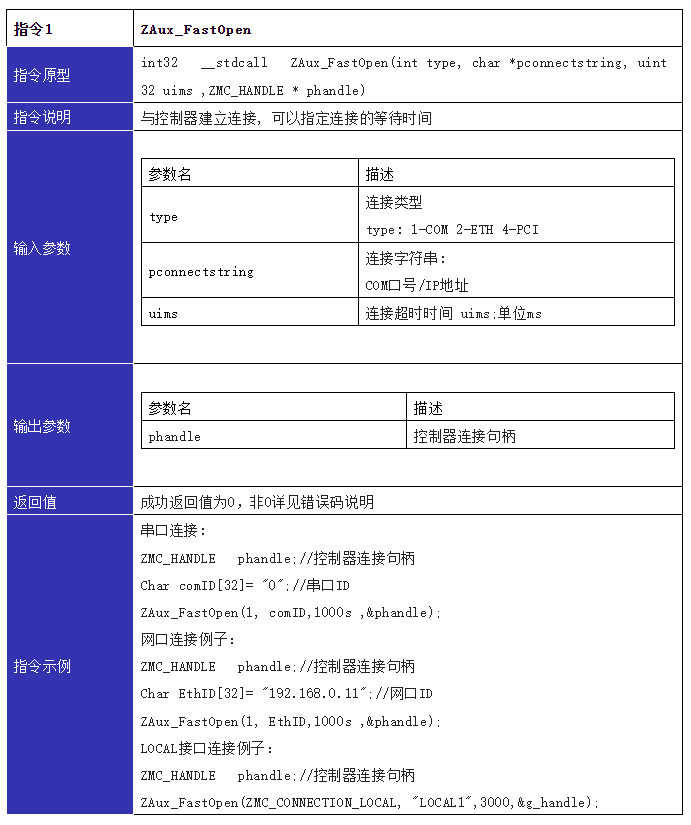
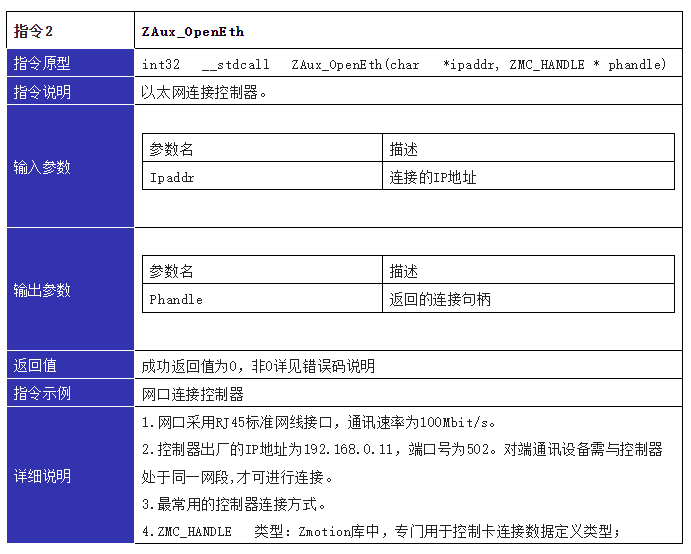
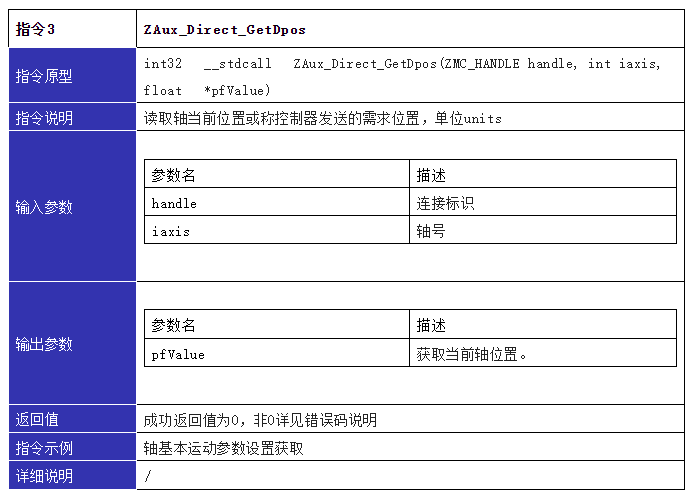
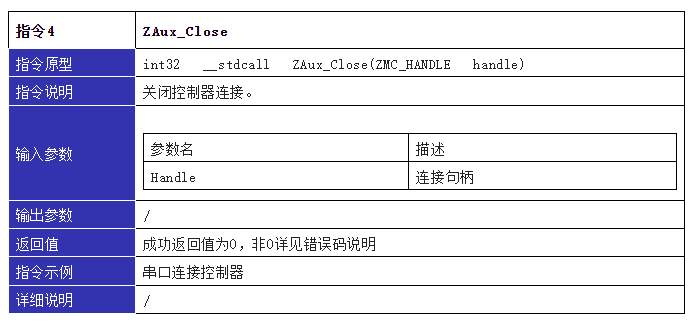
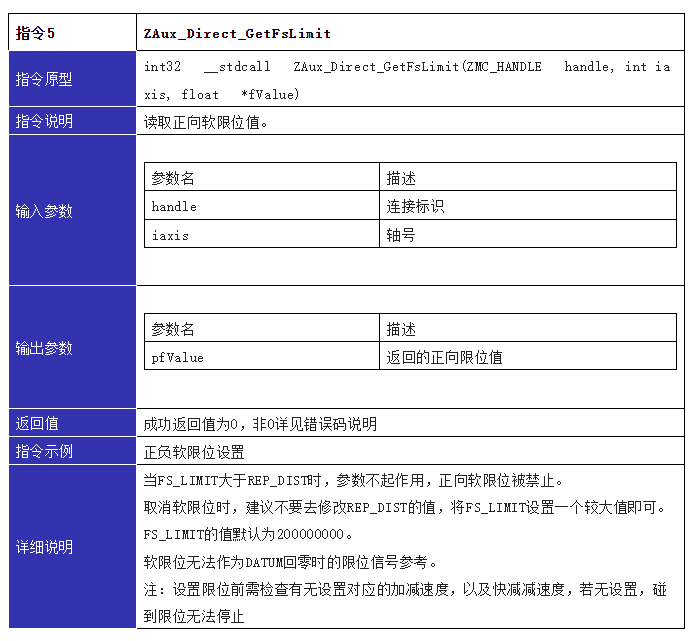
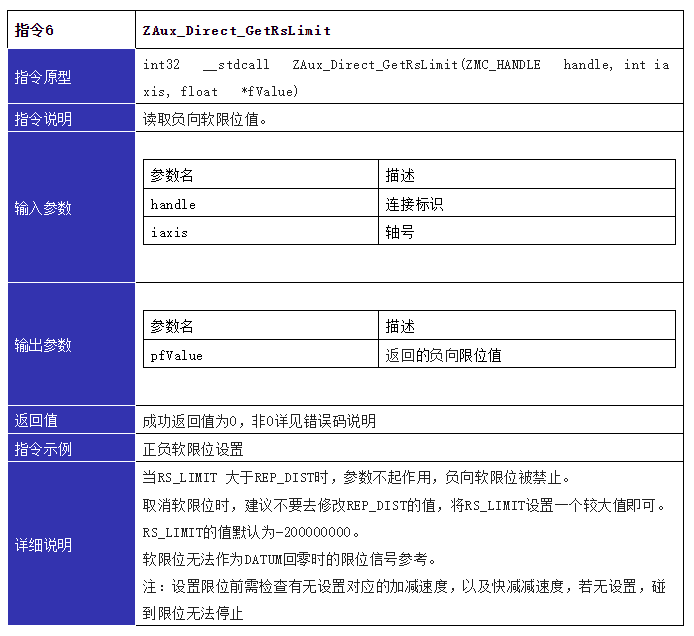
相關(guān)PC函數(shù)介紹
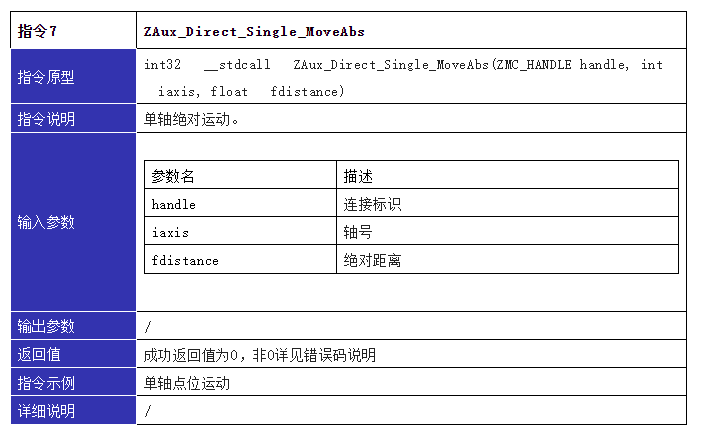
3.Labview基于LOCAL接口的單軸點(diǎn)動(dòng)例程開發(fā)。
在Labview前面板設(shè)計(jì)界面,找到需要用到的控件拖拽到前面板中進(jìn)行UI界面設(shè)計(jì),效果如下。
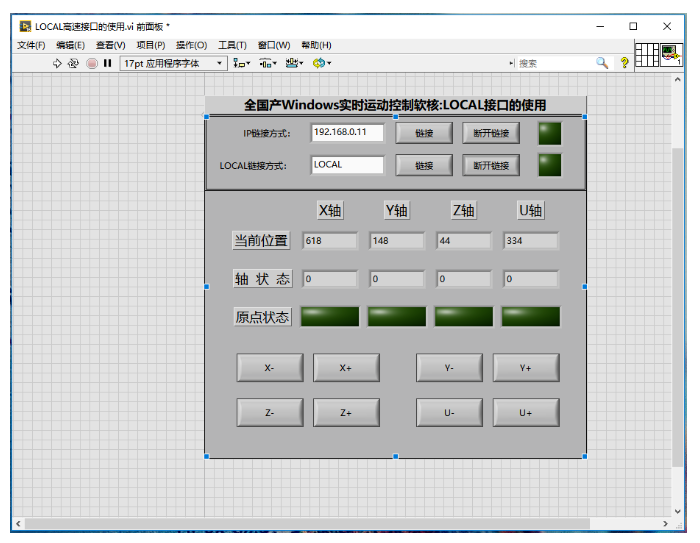
注:使用IP模式連接MotionRT7的時(shí)候,要將MotionRT710中的Config配置項(xiàng)Eth num的值設(shè)置為一個(gè)大于0的數(shù)(1-12),輸入的IP為本機(jī)IP,可以在ZDevelop中直接查看。
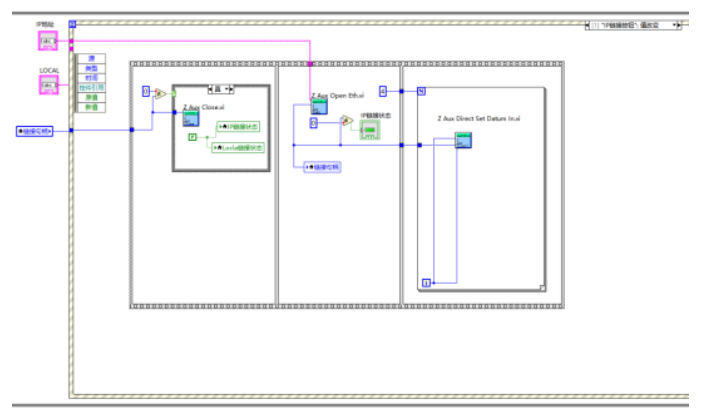
4.Labveiw程序框圖。
(1)通過IP鏈接方式的鏈接按鈕事件處理的程序框圖進(jìn)行IP鏈接。
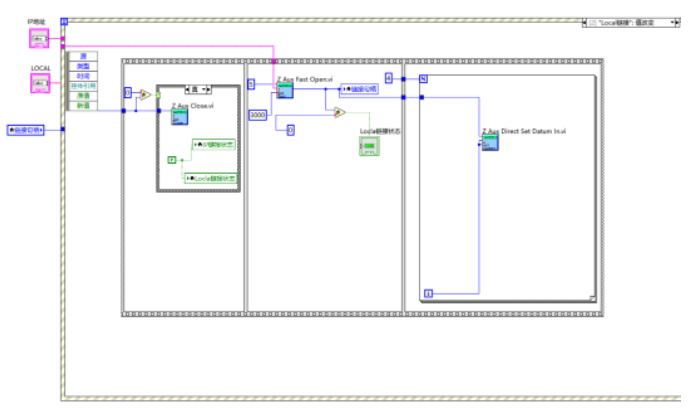
(2)通過LOCAL鏈接方式的鏈接按鈕事件處理的程序框圖進(jìn)行LOCAL鏈接方式的鏈接。
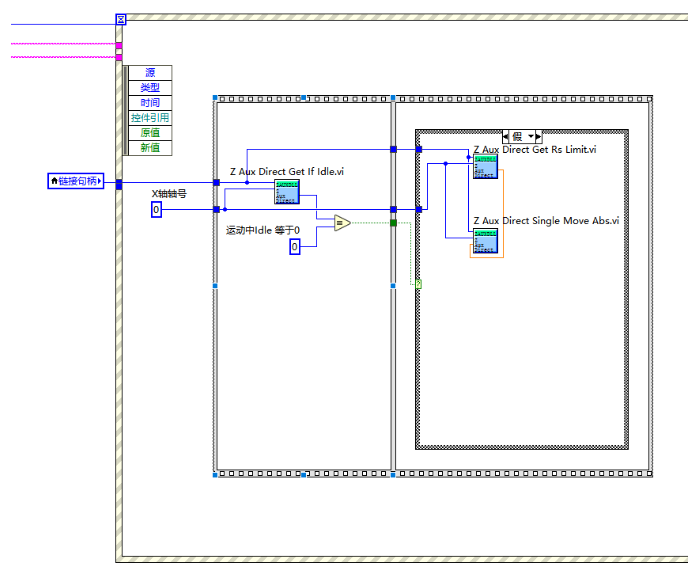
(3)負(fù)向手動(dòng)運(yùn)動(dòng)程序框圖(按下按鈕則通過絕對(duì)插補(bǔ)指令向負(fù)限位運(yùn)動(dòng),松開按鈕則停止運(yùn)動(dòng))。
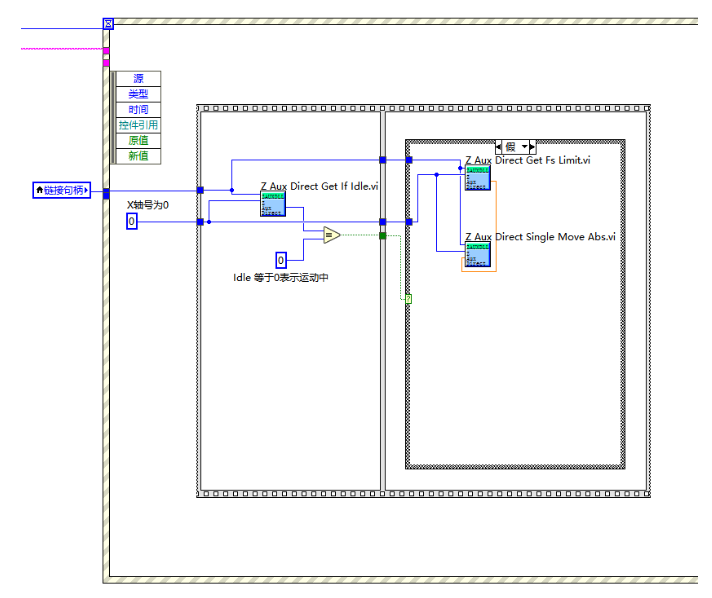
(4)正向手動(dòng)運(yùn)動(dòng)程序框圖(按下按鈕則通過絕對(duì)插補(bǔ)指令向正限位運(yùn)動(dòng),松開按鈕則停止運(yùn)動(dòng))。
本次,正運(yùn)動(dòng)技術(shù)Windows實(shí)時(shí)運(yùn)動(dòng)控制軟核(七):LOCAL高速接口測(cè)試之Labview,就分享到這里。
更多精彩內(nèi)容請(qǐng)關(guān)注“正運(yùn)動(dòng)小助手”公眾號(hào),需要相關(guān)開發(fā)環(huán)境與例程代碼,請(qǐng)咨詢正運(yùn)動(dòng)技術(shù)銷售工程師。
本文由正運(yùn)動(dòng)技術(shù)原創(chuàng),歡迎大家轉(zhuǎn)載,共同學(xué)習(xí),一起提高中國(guó)智能制造水平。文章版權(quán)歸正運(yùn)動(dòng)技術(shù)所有,如有轉(zhuǎn)載請(qǐng)注明文章來源。
審核編輯黃宇
-
測(cè)試
+關(guān)注
關(guān)注
8文章
5633瀏覽量
128325 -
LabVIEW
+關(guān)注
關(guān)注
1995文章
3670瀏覽量
333226 -
運(yùn)動(dòng)控制器
+關(guān)注
關(guān)注
2文章
445瀏覽量
25150 -
高速接口
+關(guān)注
關(guān)注
1文章
57瀏覽量
14942 -
locale
+關(guān)注
關(guān)注
0文章
11瀏覽量
1250
發(fā)布評(píng)論請(qǐng)先 登錄

Windows實(shí)時(shí)運(yùn)動(dòng)控制軟核MotionRT7 | Qt例程講解視頻演示# 正運(yùn)動(dòng)技術(shù)# 運(yùn)動(dòng)控制

Windows實(shí)時(shí)運(yùn)動(dòng)控制軟核MotionRT7 | 功能配置介紹# 正運(yùn)動(dòng)技術(shù)# 運(yùn)動(dòng)控制# 控制卡

Windows實(shí)時(shí)運(yùn)動(dòng)控制軟核:LOCAL高速接口測(cè)試之Labview# 正運(yùn)動(dòng)技術(shù)# 運(yùn)動(dòng)控制器# 運(yùn)動(dòng)控制
正運(yùn)動(dòng)自主研發(fā)實(shí)時(shí)軟核MotionRT7與Labview單軸點(diǎn)動(dòng)例程開發(fā)
Windows實(shí)時(shí)運(yùn)動(dòng)控制軟核(一):LOCAL高速接口測(cè)試之C#

Windows實(shí)時(shí)運(yùn)動(dòng)控制軟核(二):LOCAL高速接口測(cè)試之Qt

MotionRT7實(shí)時(shí)運(yùn)動(dòng)控制使用:LOCAL高速接口測(cè)試之C#
Windows實(shí)時(shí)運(yùn)動(dòng)控制軟核(三):LOCAL高速接口測(cè)試之C++
MotionRT7的安裝和使用:LOCAL高速接口測(cè)試
Windows實(shí)時(shí)運(yùn)動(dòng)控制軟核(四):LOCAL高速接口測(cè)試之VB.NET

Windows實(shí)時(shí)運(yùn)動(dòng)控制軟核(五):LOCAL高速接口測(cè)試之VC6.0

Windows實(shí)時(shí)運(yùn)動(dòng)控制軟核(六):LOCAL高速接口測(cè)試之Matlab
Windows實(shí)時(shí)運(yùn)動(dòng)控制軟核(五):LOCAL高速接口測(cè)試之VC6.0
x86平臺(tái)實(shí)時(shí)Windows機(jī)器視覺EtherCAT運(yùn)動(dòng)控制器VPLC711

EtherCAT超高速實(shí)時(shí)運(yùn)動(dòng)控制卡XPCIE1032H上位機(jī)C#開發(fā)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論