 【技術分享】為何EtherCAT在運動控制總線中如此受歡迎?
【技術分享】為何EtherCAT在運動控制總線中如此受歡迎?

 ??什么是EtherCAT
??什么是EtherCAT
EtherCAT(以太網控制自動化技術)是一個以以太網為基礎的開放架構的現場總線系統,最初由德國倍福研發。EtherCAT為系統的實時性能和拓撲的靈活性樹立了新的標準,是一種開放性的協議,開放標準由現在的EtherCAT技術組(ETG)管理。
 為什么選擇EtherCAT
為什么選擇EtherCAT
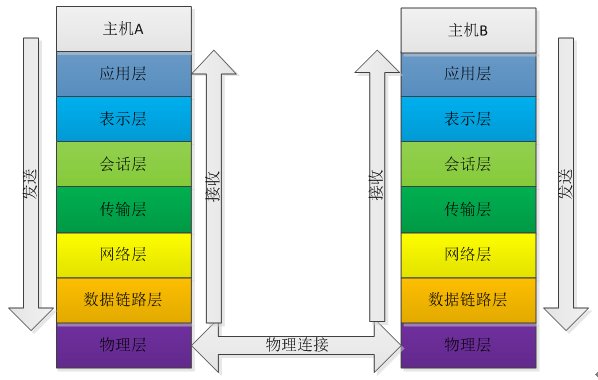 圖1OSI模型示意圖
圖1OSI模型示意圖RS232、RS485都屬于ISO七層結構中的物理層,實現完整的通訊,需要加入數據鏈路層和應用層。RS232、RS485一般需要使用串口作為鏈路層對物理層進行指揮。RS485應用層協議通常使用MODBUS,CANOPEN也是應用層協議。CANOPEN和EtherCAT通常分別結合can、ethernet實現鏈路層和物理層,EtherCAT在ISO模型設計上也僅使用應用層、數據鏈路層、物理層。
在軟件設計層次中,物理層向上走,將上一層幀再封裝成特定幀后傳輸,通信過程將存在組包拆包的過程,越往頂層走幀格式越復雜,相比較其它的以太網協議,可見EtherCAT設計實現的精簡之處,體現出了更優越的實時性。2. 優越的綜合性能2.1 傳輸高效EtherCAT的物理層層中使用光信號進行傳輸,傳輸速率達100Mbit/s(100 base-Tx),且為全雙工傳輸,相比于上述總線均為電氣傳輸。RS232抗干擾能力差,RS485半雙工,can一幀只能傳輸8個字節,而以太網傳輸一幀可以高達1514字節。以太網使用光纖為傳輸媒介,線束簡潔,同時抗干擾能力更強,傳輸距離更遠。
2.2 拓撲靈活
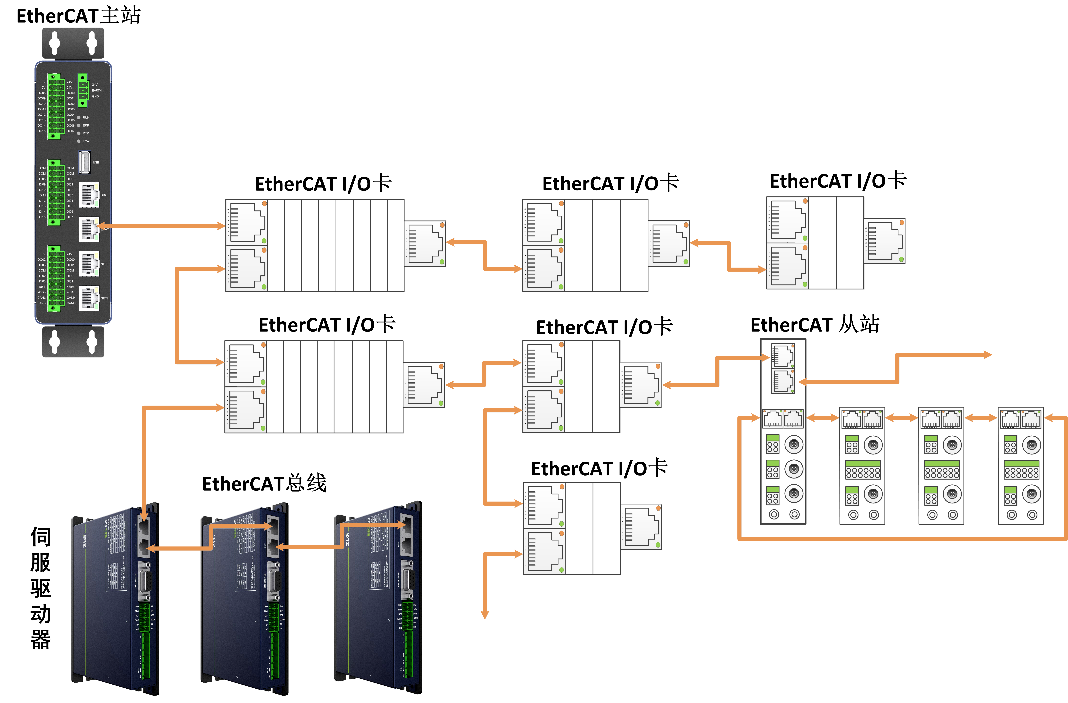 圖2EtherCAT拓撲結構圖
圖2EtherCAT拓撲結構圖EtherCAT符合以太網標準,支持多種拓撲結構:線型、星型、樹型,以一種“邏輯閉環“的方式傳播,靈活性更強。主站實現只需要一張普通網卡,不需要交換機與路由器的參與,解決傳統以太網的交換機延時、堆棧延時、帶寬利用率等問題。
2.3 時鐘同步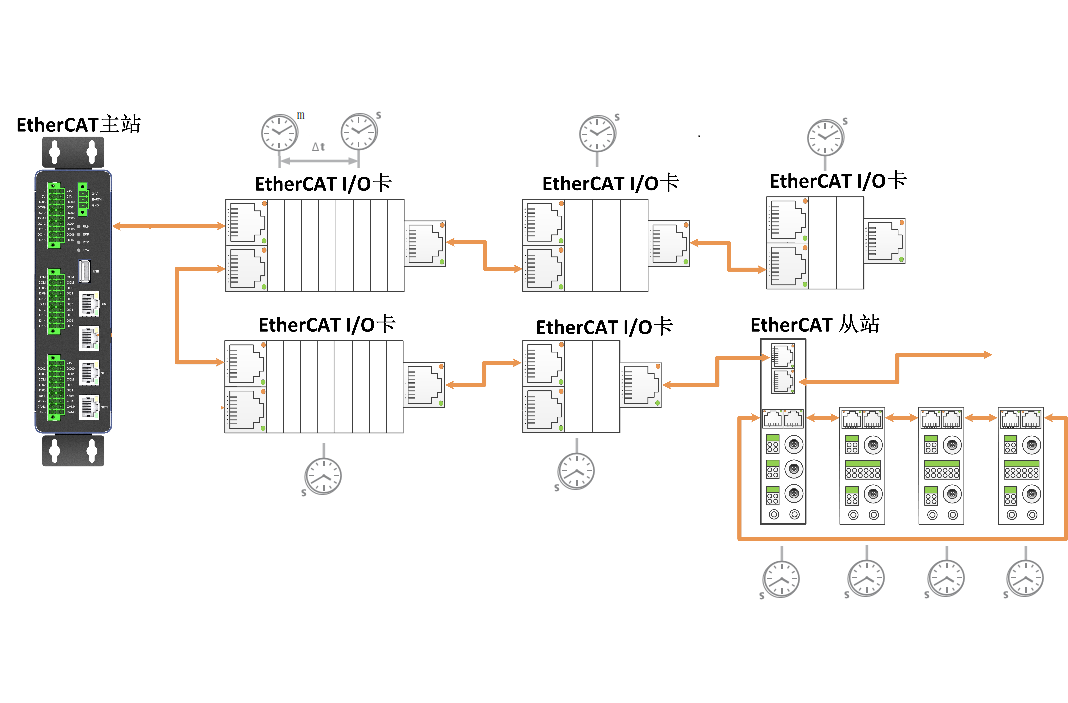 圖3DC分布式時鐘圖
圖3DC分布式時鐘圖在多軸運動控制中,時鐘同步的精準性能對數據傳輸產生直接影響,可能會導致丟幀,運動不協調,從而無法控制對各軸設備的同步執行。EtherCAT支持DC分布式時鐘,且基于硬件的產生的時鐘進行校準和補償,大大減小了系統的抖動時間。
EtherCAT 實現了數據傳輸中速率更快、實時性更高、更可靠、傳輸數據量更大、抗干擾能力更強的等特點,這恰是市場日益要求的性能指標,您心動了嗎?EtherCAT幀結構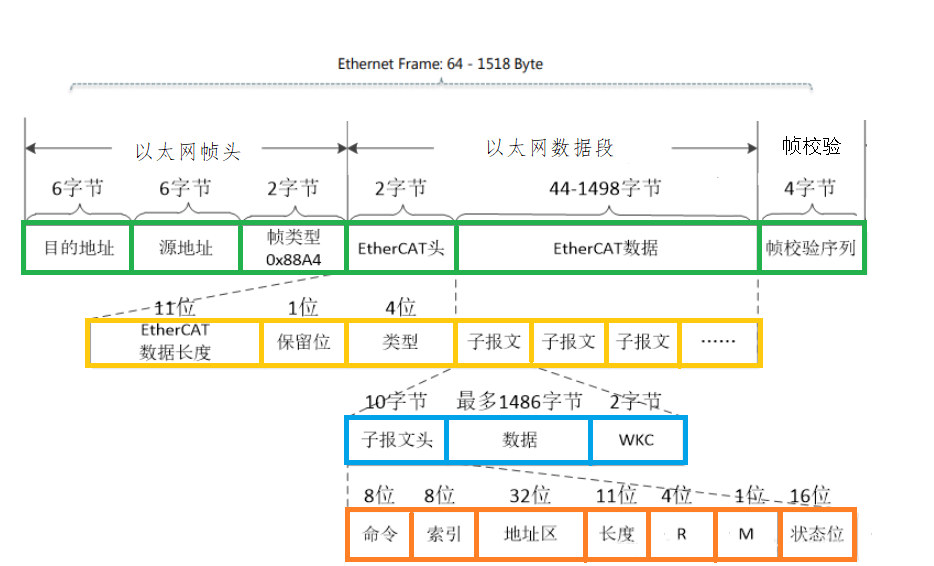
圖4 以太網幀格式圖
表1以太網幀含義表|
名稱 |
含義 |
|
目的地址 |
接收方MAC地址。 |
|
源地址 |
發送方MAC地址。 |
|
幀類型 |
0x88A4 |
|
EtherCAT頭部 |
長度:報文總長度 類型:1 表示與從站通信。 |
|
EtherCAT數據段 |
該段存放著應用層發送的數據。 |
|
幀類型 |
幀校驗 |
EtherCAT應用層1. ESM狀態機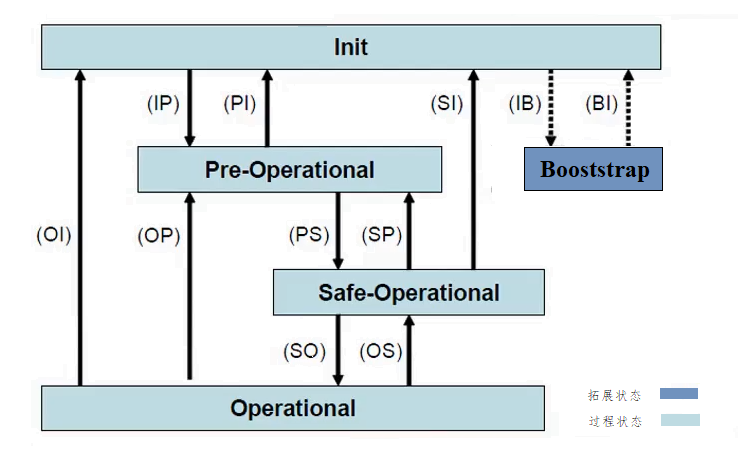
圖5狀態機轉換關系圖
表2Ethercat狀態機含義表
|
狀態 |
說明 |
|
Init |
主站和從站之間沒有應用層上的通訊,主站可以訪問從站DL相關狀態寄存器信息。 |
|
Pre-Operration |
如果從站支持郵箱通信,主站和從站可以使用郵箱和相關協議進行應用層次的初始化和參數配置,此狀態下不能進行過程數 據通信。 |
|
Safe-Operration |
可以進行過程數據通信,從站可以進行數據的輸入,但是不允許數據輸出,數據輸出處于“安全”狀態。 |
|
Operration |
從站可以進行數據的輸入輸出操作。 |
-
廣播尋址
將數據廣播到各個從站設備。 -
自增尋址
根據設備連接的順序進行編號,從0開始,每經過一個從站數值-1,以此遞推。 -
設置尋址
相當于給每一個從站分配地址,主站通過從站地址找到對應的從站進行通信。 -
邏輯尋址
主站配備4G的數據邏輯地址空間,FMMU將數據邏輯地址和從站中的物理地址進行映射,主站在幀中只需攜帶某個邏輯地址,即可尋址到任意從站中的任意數據,是一種更加靈活的尋址方式。
3. 數據傳輸
3.1 同步管理器SM
同步管理器(Syncmangers)用來協調應用層和主機的數據交互,實現數據同步而不是時間同步,確保數據正確讀取和寫入,并且同步管理可以以中斷的形式通知主機和應用程序更新事件,然后進入中斷服務函數中處理即可。SM通道一共用到4個,SM0和SM1用于郵箱數據輸和輸入,SM2和SM3用于過程數據的輸出和輸入。3.2 應用層協議EtherCAT應用層協議支持COE、VOE、FOE、EOE等協議,而在電機控制領域我們常用到的是COE協議,COE全稱為CanOpen Over EtherCAT,相當于CanOpen協議通過EtherCAT方式來實現,都是基于cia402協議進行編寫。主站可以通過郵箱(SDO)或PDO對從站的對象字典進行讀寫操作,實現數據通訊。郵箱常用對從站的配置和讀寫,采用應答方式,而PDO為過程數據,實現數據通信的實時和快速傳輸。4. 設備配置4.1 描述文件
信息描述文件主要有emi、esi、eni文件。emi為主站信息描述文件;esi則是從站描述文件,包含廠商信息、設備信息描述、SM描述、對象字典、配置數據等內容組成;eni是EtherCAT網絡信息配置文件,描述從站數量,SM與DC配置信息等,結合esi描述文件,借助配置軟件進行配置生成,完成EtherCAT網絡運行時對主站和從站設備進行初始化操作。
4.2 配置軟件
本文使用的配置軟件是ZLG致遠電子團隊開發的EtherCAT網絡配置工具,開發者導入esi從站描述文件后進行相關需求配置,生成相應的eni文件,EtherCAT網絡運行時將對所有設備進行初始化。EtherCAT配置軟件支持以下功能供幫助開發者快速使用與開發。-
瀏覽設備信息
顯示主站和從站的設備信息,如制造商信息,網絡配置信息等內容。 -
瀏覽拓撲結構
配置軟件顯示主站和從站的連接拓撲圖。 -
FMUU/SM與DC配置
FMMU、SM、PDO相關的信息與配置,DC分布時鐘的操作模式選擇。 -
瀏覽輸入與輸出變量
顯示PDO數據的輸入與輸出數據信息,如通道、名稱、類型、位長等信息。 -
郵箱功能
支持選擇配置郵箱輪詢與讀取對象字典的方式,顯示相關的COE對象字典列表。 -
內存信息
瀏覽內存偏移信息與eeprom的參數信息等內容。 -
集成幫助文檔
瀏覽幫助文檔,查閱更多的功能介紹與demo示例,幫助使用與開發。
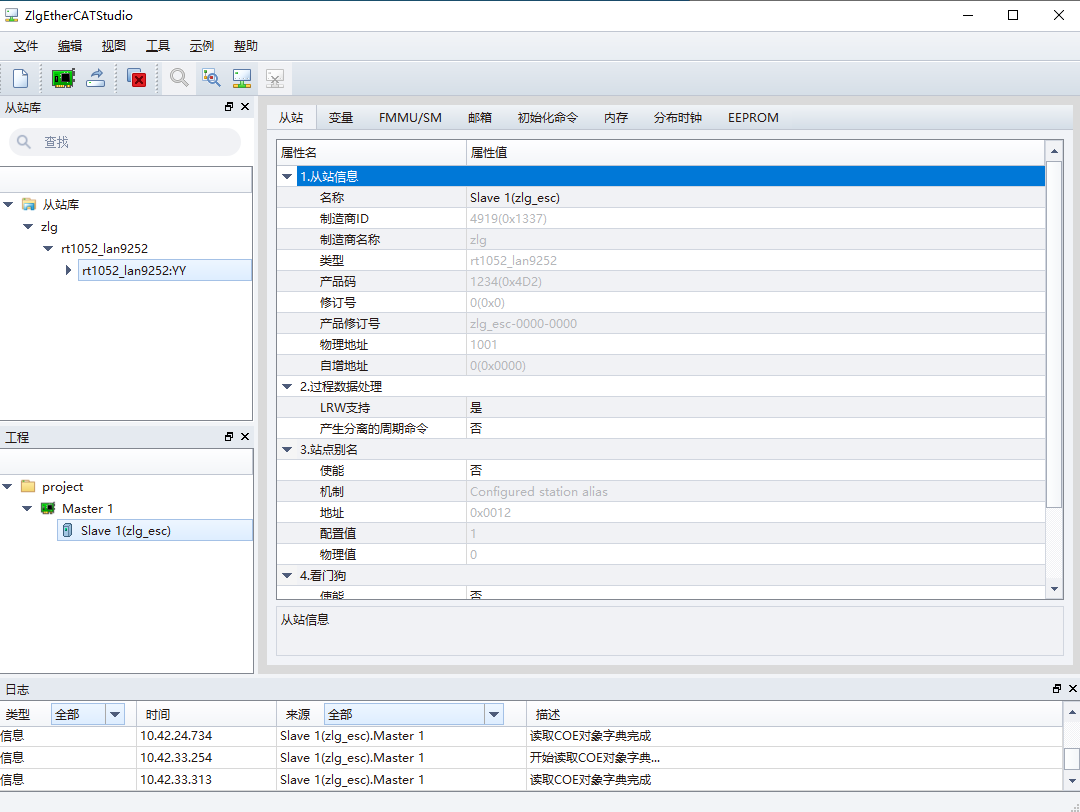
圖6EtherCAT配置軟件主界面圖
產品案例
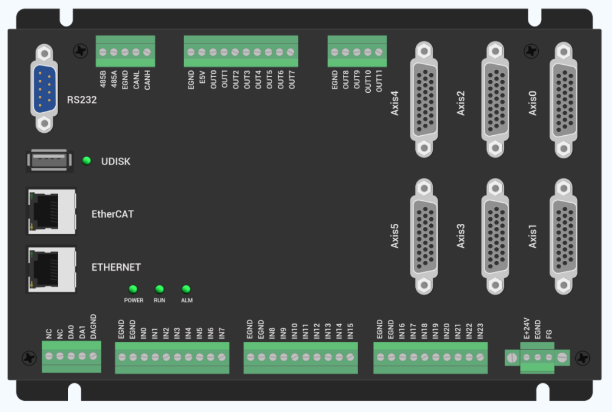
圖7ZMC600EEtherCAT主站控制器
1. 產品介紹
ZMC600E(點擊了解詳情)是ZLG致遠電子開發的最新一代智能總線型運動控制器,是面向工廠智能化時代的機器控制器。其采用工業領域內先進的嵌入式 ARM 方案,集實時操作系統、智能算法于一身,配套工業圖形化編程軟件開發環境。
ZMC600E采用TI的雙核64位Arm-Corte-A53,四核Cortex-R5F的AM6442應用處理器為核心,主頻1GHz,內置1GB DDR4、4GB eMMC以及32KB FRAM,預留有多路以太網、CAN、IO、USB等硬件接口。同時ZMC600E支持點位運動、連續軌跡、直線圓弧插補、連續插補、螺旋線等運動功能,可以自由設定運行速度、停止速度、加、減速時間可以獨立設置,S型曲線平滑等參數,支持在線改變速度和在線改變位置,用戶可以輕松構智能化控制系統,快速實現和部署現場各種工藝的應用。
2. EtherCAT性能優勢-
ZMC600E集成了商業授權的EtherCAT主站解決方案;
-
Cortex-R5F協處理器獨立處理EtherCAT數據收發,實時性更強;
-
精準分布式式時鐘,振動<1μs;
-
最多支持128個從站節點,節點間距最大100m;
-
支持CoE對象讀取寫,SoE IDN讀寫;
-
循環周期最小達125μs,支持線形、樹形、星型拓撲結構。
-
致遠電子
+關注
關注
13文章
411瀏覽量
31909
原文標題:【技術分享】為何EtherCAT在運動控制總線中如此受歡迎?
文章出處:【微信號:ZLG_zhiyuan,微信公眾號:ZLG致遠電子】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄


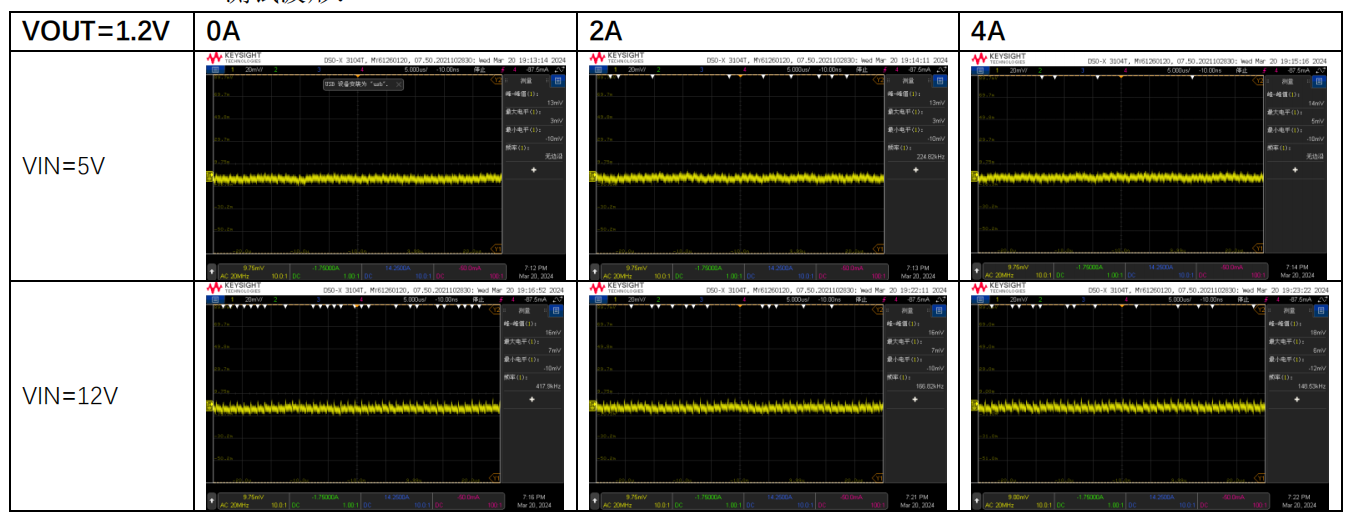
高效率DCDC電源芯片在運動控制器中的應用:設計考量、性能評估與可靠性分析





脈沖全閉環EtherCAT運動控制器的固件升級






 工商網監
工商網監
評論