 FMCW雷達測距/測速原理詳解
FMCW雷達測距/測速原理詳解

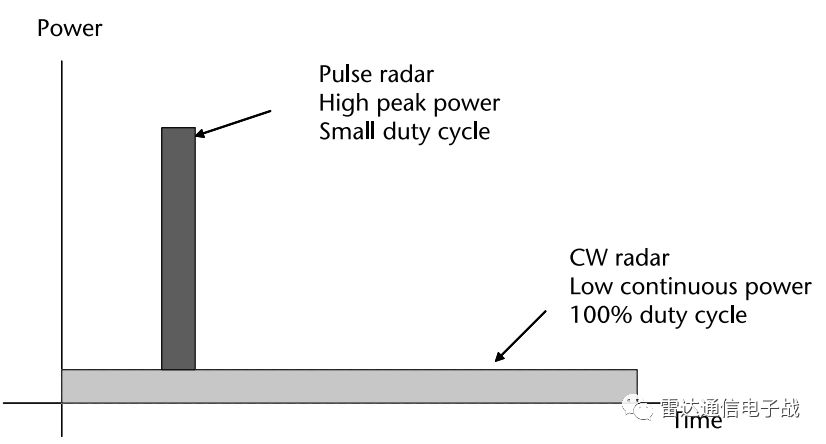
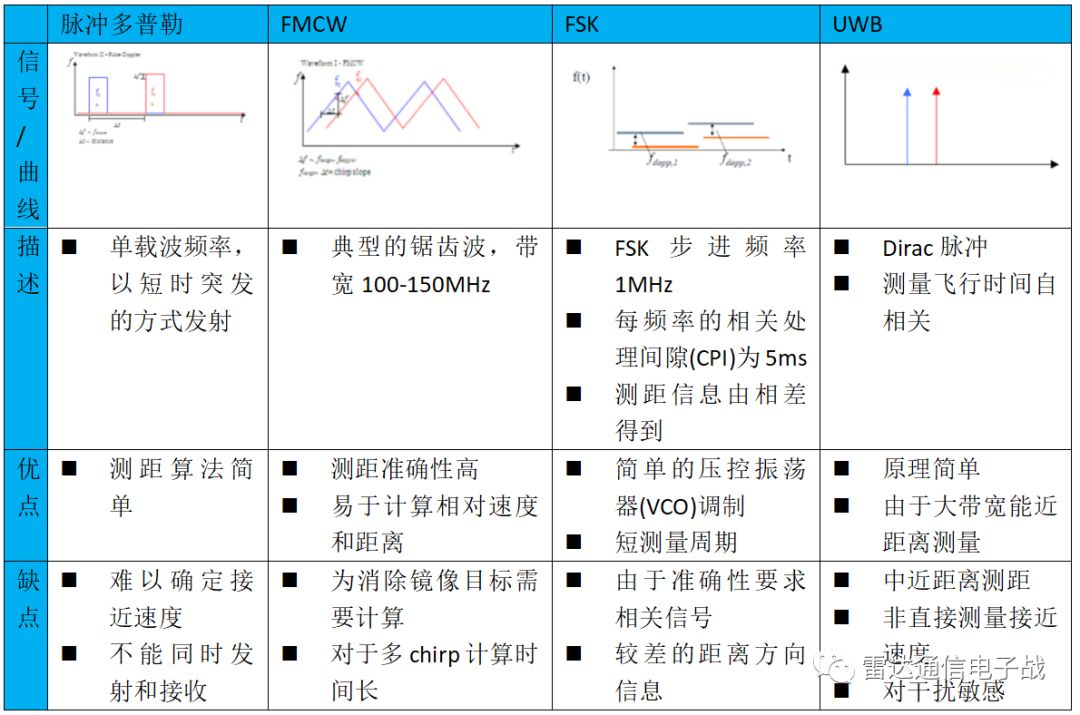
雷達按照發射信號的種類可分成脈沖雷達和連續波雷達,常規脈沖雷達發射周期性的調制脈沖信號,而連續波雷達發射的是連續波信號。通常,脈沖雷達具有較高的峰值功率和較小的占空比,而連續波雷達則具有100%的占空比和較低的功率。
FMCW雷達在發射功率低的情況下實現高分辨率的場景中十分有用,包括汽車雷達,近距成像和其他許多應用場景。
FMCW雷達基礎
連續波雷達的發射信號可以是單頻連續波(CW)或者調頻連續波(FMCW),調頻方式也有多種,常見的有三角波、鋸齒波、編碼調制或者噪聲調頻等。單頻連續波雷達僅可用于測速,無法測距,而FMCW雷達既可測距又可測速,在近距離測量上的優勢日益明顯。
FMCW雷達在掃頻周期內發射頻率變化的連續波,被物體反射后的回波與發射信號有一定的頻率差,通過測量頻率差可以獲得目標與雷達之間的距離信息,該差頻信號頻率較低,一般為KHz,因此硬件處理相對簡單、適合數據采集并進行數字信號處理。簡單的結構框圖如下:
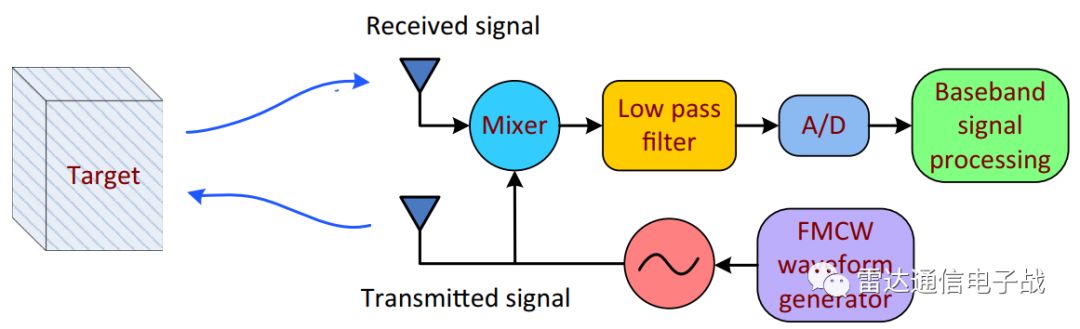
高頻信號由壓控振蕩器產生,通過功率分配器將一部分經過額外放大后饋送至發射天線,另一部分耦合至混頻器,與接收的回波混頻后低通濾波,得到基帶差頻信號,經過模數轉換后送至信號處理器處理。
測距/測速原理
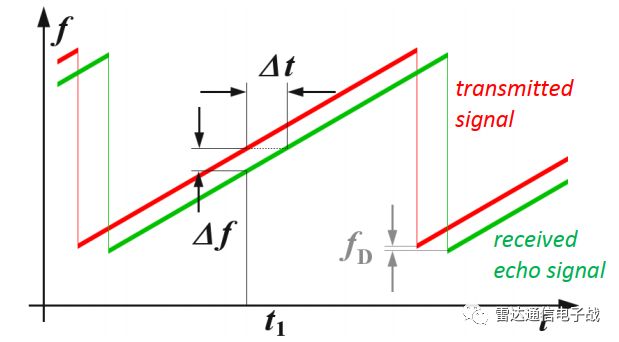
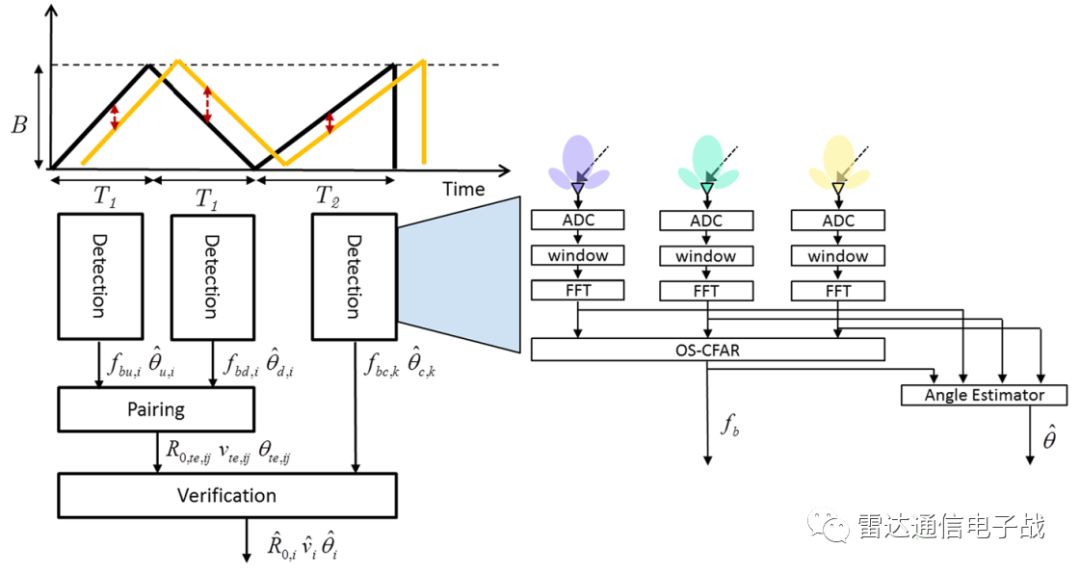
下面以三角波調頻連續波為例來簡單介紹雷達的測距和測速原理。如下圖,紅色為發射信號頻率,綠色為接收信號頻率,掃頻周期為T,掃頻帶寬為B,發射信號經過目標發射,回波信號會有延時,在三角形的頻率變化中,可以在上升沿和下降沿兩者上進行距離測量。
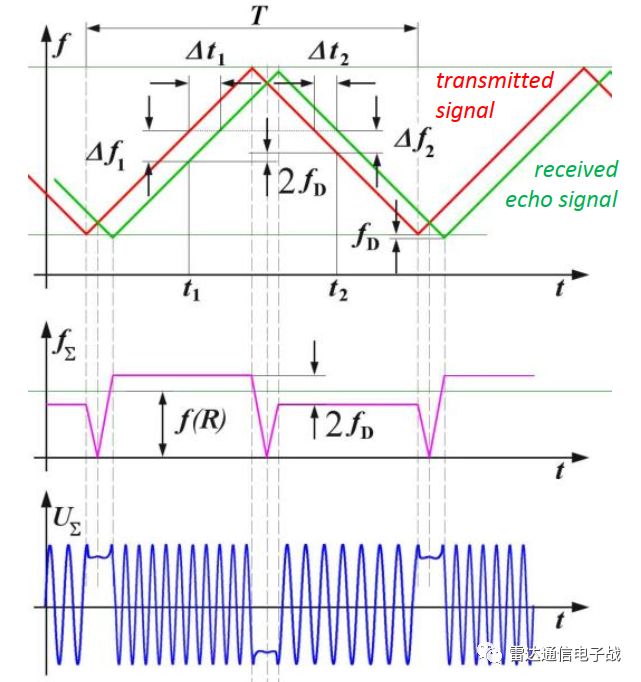
如果沒有多普勒頻率,上升沿期間的頻率差值等于下降沿期間的測量值。對于運動目標,則上升/下降沿期間的頻率差不同,我們可以通過這二個頻率差來計算距離和速度。
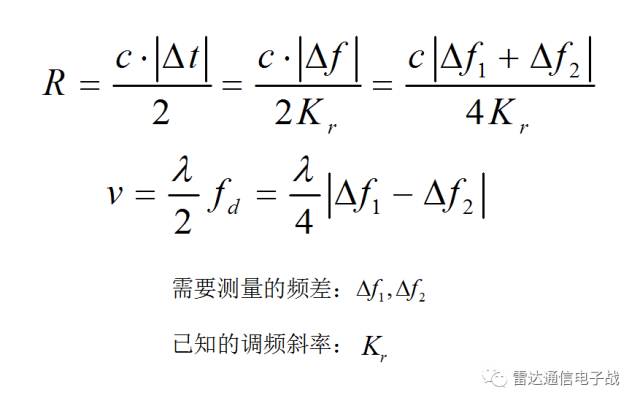
差頻信號經低通濾波和放大后送數字信號處理器,完成對差頻信號的FFT、檢測,對目標數據進行處理后送顯控終端顯示。三角波調頻連續波雷達正是通過采用正負調頻斜率來消除距離與速度的耦合,進而進行目標速度的估計。
但是,往往為了獲得目標的速度信息,雷達通常以幀為單位,均勻等時間間隔地發出一串chirps信號。然后利用信號相位差來測量出目標場中目標的速度。對與每個chirp對應的數字化采樣點執行距離FFT,輸出結果以連續行的形式存儲在矩陣中。處理器接收并處理一幀中所有單個chirp后,開始對chirps串序列進行FFT(多普勒FFT)。
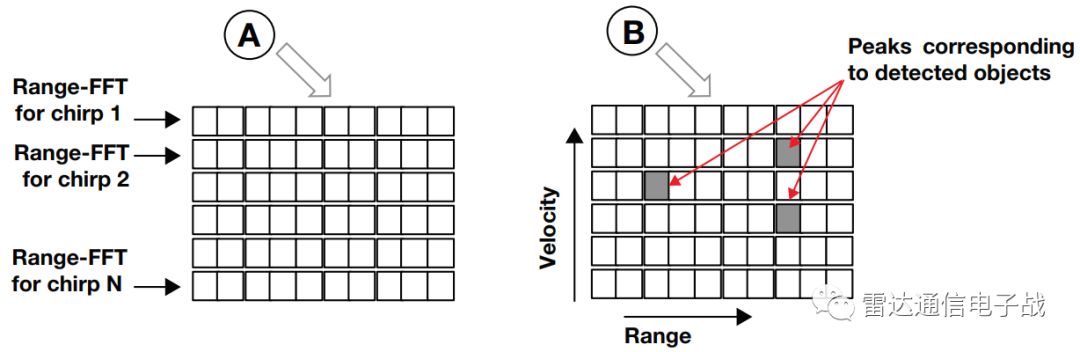
距離FFT(逐行)和多普勒FFT(逐列)的聯合操作可視作每幀對應數字化采樣點的二維FFT。二維FFT可同時分辨出目標的距離和速度。也就是說,二維FFT的峰值位置對應雷達前方目標的距離和速度。
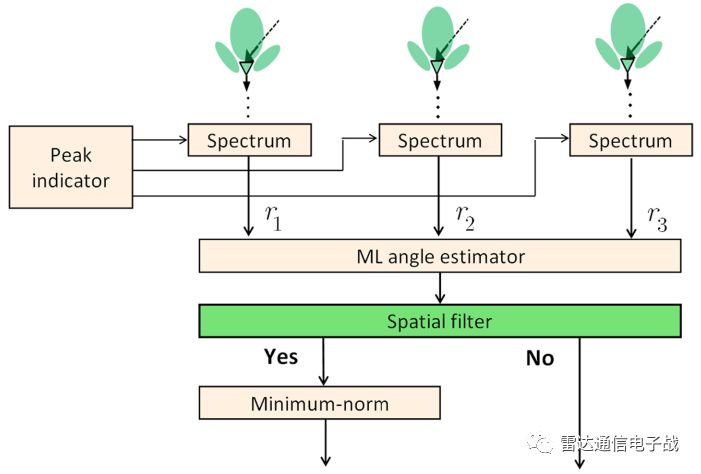
對目標角度信息的解析需要多個RX天線。因此,處理器首先處理每個天線接收到的信號進行二維FFT。隨后,對多個天線所得的二維FFT矩陣進行聯合處理,最后得出目標的到達角。
通過以上處理,雷達可以解析出目標的距離、速度和角度等多維信息。雷達的性能指標取決于發射信號的選擇。例如,隨著chirp信號帶寬的增加,距離分辨率隨之提高;速度分辨率隨著幀持續時間的增加而提高。
同樣地,最大可測速度與相鄰chirp信號之間的空間間隔成反比;TX/RX天線的數量對角度分辨率有著決定性的作用。FMCW雷達的有效噪聲帶寬與其調頻時間成反比,調頻時間越長,有效噪聲帶寬越低,分辨率越高。
連續波調頻(FMCW)雷達已廣泛應用于汽車領域,包括從安全到舒適性能的各個方面,例如盲點檢測、換道輔助、自動巡航控制和停車輔助等。無論天氣和周圍的光照條件如何,雷達都能夠可靠、準確地探測和定位障礙物。
優勢
FMCW雷達收發同時,理論上不存在脈沖雷達所存在的測距盲區,并且發射信號的平均功率等于峰值功率,因此只需要小功率的器件,從而降低了被截獲和干擾的概率;其缺點是測距量程較短,距離多普勒耦合以及收發隔離難等缺點。
FMCW雷達測量目標的距離和速度的性能與周圍環境的光照情況無關,并不需要額外的輔助光源提供照明。其較高的工作頻率意味著整體解決方案的尺寸更小。FMCW雷達具有容易實現、結構相對簡單、尺寸小、重量輕以及成本低等優點,在民用/軍事領域均得到了廣泛的應用。
和脈沖雷達系統相比,調頻連續波雷達的一大優勢是發射功率低,尺寸小,成本低廉,雷達在發射機和接收機均工作時可實現零盲區,且可直接測量多普勒頻移和靜態目標概率,這點非常符合車載雷達和工業雷達的性能需求。
除通用指標外,該類雷達核心性能指標還包括分辨率、模糊度以及距離和徑向速度的精度。分辨率由信號帶寬和相干處理間隔決定,參數估計的精確程度由雷達回波信號的信噪比高低決定。
審核編輯:湯梓紅
-
信號
+關注
關注
11文章
2855瀏覽量
78394 -
雷達
+關注
關注
50文章
3125瀏覽量
120315 -
FMCW
+關注
關注
9文章
98瀏覽量
23904 -
測距
+關注
關注
2文章
107瀏覽量
20175 -
測速
+關注
關注
0文章
40瀏覽量
14427
原文標題:基礎知識:FMCW雷達測距/測速
文章出處:【微信號:雷達通信電子戰,微信公眾號:雷達通信電子戰】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
圖片詳解FMCW雷達的組成與原理

納雷科技發布新一代雙鑒引擎測距測速雷達
FMCW激光雷達,加速落地工業場景
車用低成本24GHZ雷達傳感器/測速/測距/測方向
停車位檢測24GHZ雷達傳感器/短距離測距/低成本
一個示例說明FMCW雷達信號設計的基本原則
FMCW測距測速雷達,射頻端威爾金森功率合成器
微型測距雷達的原理及組成

LFMCW雷達數字化測距測速的工作參數設計資料說明






 工商網監
工商網監
評論