 探索 Jetson Nano 為 myCobot 280 提供的強大功能
探索 Jetson Nano 為 myCobot 280 提供的強大功能

探索 Jetson Nano 為 myCobot 280 提供的強大功能,機器人技術的一個有前途的組合
介紹
近年來,科學技術的發展給我們的生活帶來了許多新的產品和服務,包括機器人在各個領域的集成。機器人已經成為我們生活中必不可少的一部分,從送貨機器人到智能家居語音助手。
在本文中,我們將討論myCobot 280 Jetson Nano,這是一種能夠進行科學實驗和教育方面的機械臂。
什么是Jetson Nano?
Jetson Nano 的尺寸僅為 70 x 45 毫米,比信用卡略小,是一種適用于機器學習應用的模塊系統 (SoM)。因為它只消耗大約 5 到 10 瓦的功率,所以它是邊緣應用中 AI 的絕佳工具。

Jetson Nano有一個基于Maxwell的GPU,其中包含128個CUDA內核,能夠每秒計算5 teraflops(.5 TFLOPs)。憑借其強大的ARM Cortex A57處理器和4GB LPDDR4 RAM,Nano是一款功能強大的小型計算機。它還支持多種外圍設備,包括千兆以太網、HDMI 2.0、DisplayPort 1.4、2 個 DSI 連接器、一個 M.2 PCIe 連接器、4 個 USB 3.0 端口和兩個 CSI 相機連接器(用于 Pi 相機等相機)。
它還具有一個40針GPIO連接器,其布局與Raspberry Pi相同,使制造商和開發人員能夠輕松重用以前項目中的某些模塊和電路。
隨著ChatGPT的出現,AI再次成為全球關注的焦點。從現在開始,值得從機械臂的角度了解人工智能趨勢。
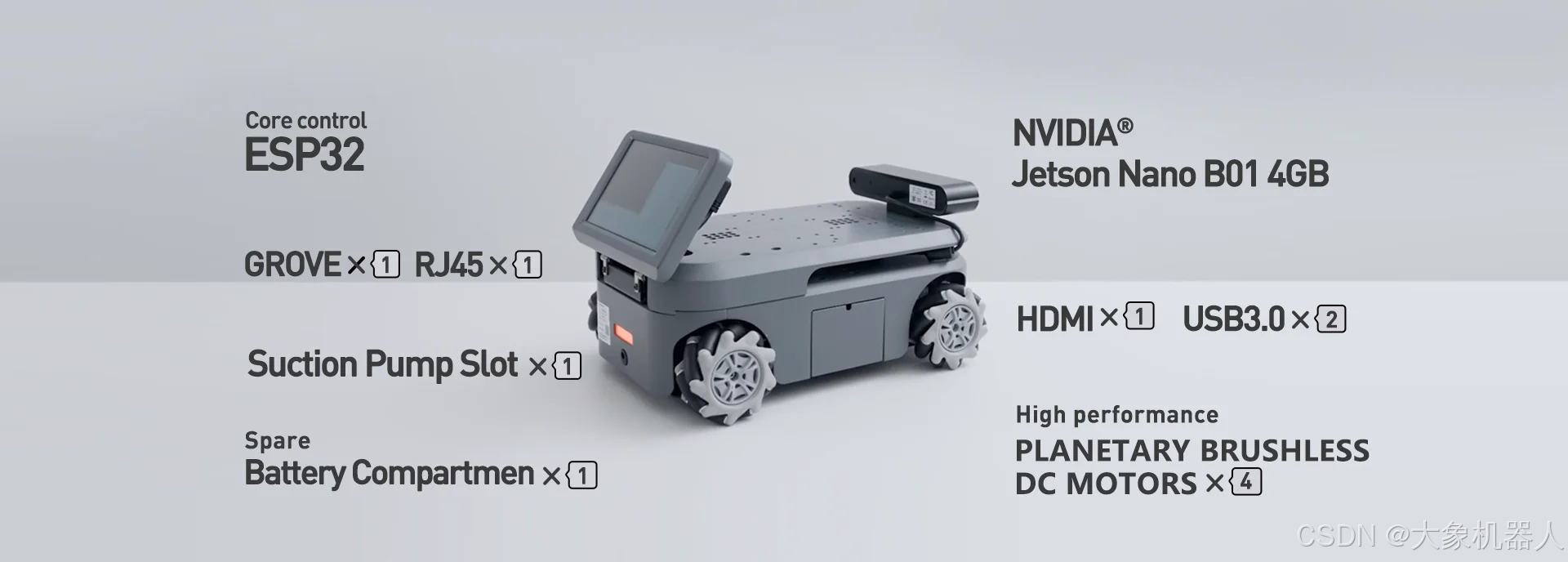
什么是myCobot 280 Jetson Nano?
myCobot 280 Jetson Nano是一種嵌入Jetson Nano的機械臂,Jetson Nano是一款小巧而強大的計算機,使手臂能夠輕松執行復雜的任務。手臂的有效載荷為 250 克,這意味著它可以攜帶高達 250 克的物體。手臂設計靈活且用途廣泛,具有六軸運動和高達 280 毫米的伸展范圍。它是廣泛應用的理想工具,包括教育、研究和 DIY 項目。
myCobot 280 Jetson Nano是一個開源的機械臂,這意味著源代碼和硬件設計可供公眾使用。這使用戶能夠修改和定制手臂以滿足他們的特定需求。該arm還與各種軟件和編程語言兼容,包括Python,ROS和myBlockly。
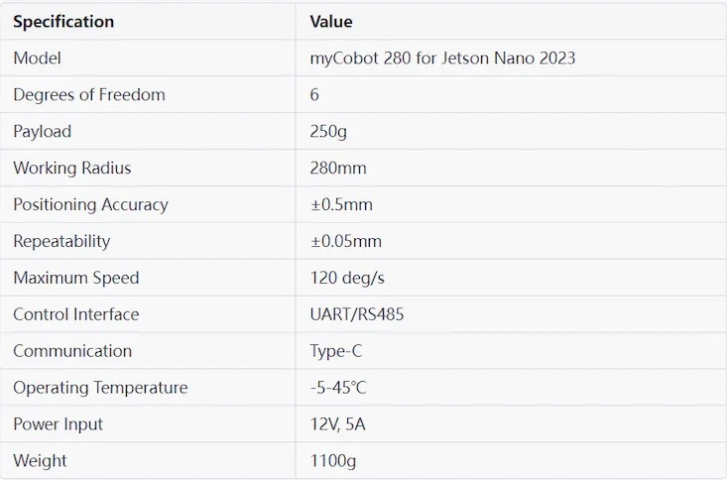
規范
讓我們看一下下表,看看它的具體規格是什么樣的。
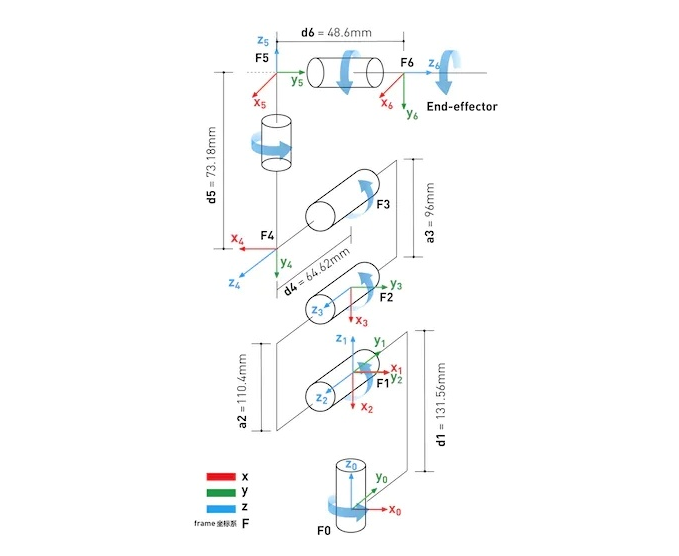
這是一個 DH 參數
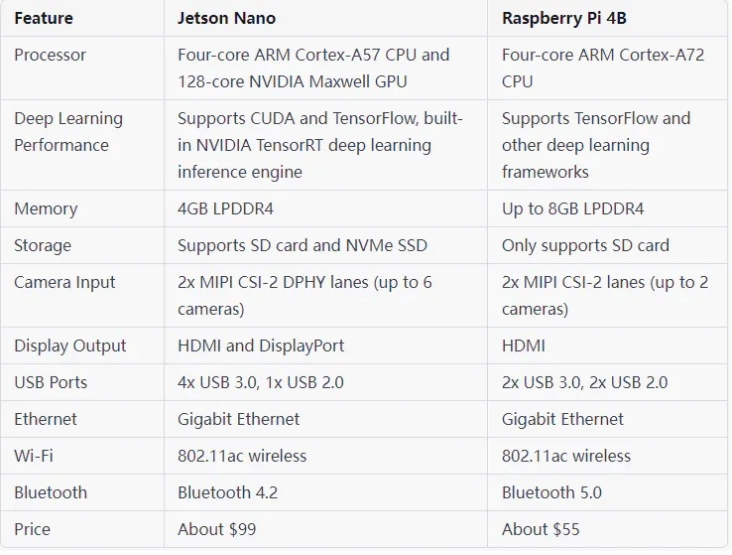
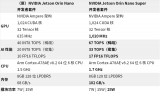
也許您對Jetson Nano和Raspberry Pi之間的區別感好奇。我們將簡要介紹使用 Jetson Nano 作為機器人嵌入式手臂的優勢。
在處理性能方面,Jetson Nano采用了四核ARM Cortex-A57 CPU和128核NVIDIA Maxwell GPU,比Raspberry Pi的四核ARM Cortex-A72 CPU更強大。ARM Cortex-A57 CPU采用64位架構,時鐘速度為1.43GHz,提供更高的計算性能。NVIDIA Maxwell GPU 專為深度學習等高性能計算任務而設計,具有高并行計算和大規模浮點計算能力。
在深度學習性能方面,Jetson Nano的GPU支持CUDA、TensorFlow等深度學習框架,可以加速深度學習模型的訓練和推理。此外,Jetson Nano 還嵌入了 NVIDIA TensorRT 深度學習推理引擎,進一步提升了深度學習模型的推理性能。雖然Raspberry Pi的性能也可以支持一些深度學習應用程序,但由于其處理器和GPU的限制,其性能相對較弱。
總體而言,如果一個項目需要高性能處理器,Jetson Nano將是最佳選擇,而Raspberry Pi基于其龐大的社區和世界上最大的開源硬件數據而擁有自己的優勢。
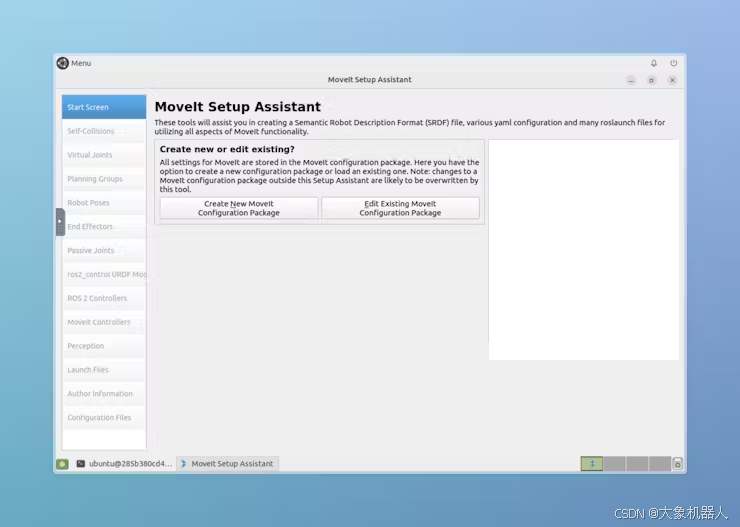
如何使用?
要開始使用myCobot280,我們只需要一臺顯示器、一個鍵盤和一個鼠標。我們可以使用一個名為pymycobot的Python庫來控制myCobot280的移動,該庫通過其開放的API提供了許多控制接口。有了這個庫,我們可以輕松地為機器人手臂開發應用程序。
我們利用pymycobot提供的API來控制myCobot280的動作,并編排舞蹈表演。
import serial from pymycobot import MyCobot import time mc = MyCobot('/dev/ttyTHS1',115200) mc.send_angles([0,0,0,0,0,0],80) time.sleep(1) for count in range(2): mc.send_angles([(-0.17),(-94.3),118.91,(-39.9),59.32,(-0.52)],80) time.sleep(1.2) mc.send_angles([67.85,(-3.42),(-116.98),106.52,23.11,(-0.52)],80) time.sleep(1.7) mc.send_angles([(-38.14),(-115.04),116.63,69.69,3.25,(-11.6)],80) time.sleep(1.7) mc.send_angles([2.72,(-26.19),140.27,(-110.74),(-6.15),(-11.25)],80) time.sleep(1) mc.send_angles([0,0,0,0,0,0],80)

我們還可以在機械臂的末端安裝一個攝像頭來探索機器視覺。
這是openCV開發的人臉識別功能的代碼。
def image_info(): # load cascade face_cascade = cv2.CascadeClassifier('haarcascade_frontalface_default.xml') # input photo img = cv2.imread('maya.png') # turn to grays gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # check human face faces = face_cascade.detectMultiScale(img, 1.1, 4) for (x, y, w, h) in faces: cv2.rectangle(img, (x, y), (x+w, y+h), (255, 0, 0), 2) center_x = (x+w-x)//2+x center_y = (y+h-y)//2+y cv2.circle(img,(center_x,center_y),20,(0,255,255),2) # show plt.imshow(img) plt.show()
在Raspberry Pi 4B和Jetson Nano上運行此面部識別代碼顯示出明顯的速度差異,Jetson Nano返回結果的速度比Raspberry Pi快1-2秒。
讓我們先了解算力意味著什么。計算能力通常以每秒浮點運算數 (FLOPS) 來衡量。FLOPS是一秒鐘內可以完成的浮點運算數,用于評估計算機系統的性能。在深度學習領域,FLOPS通常用于衡量模型的計算復雜度和性能。例如,具有較高 FLOPS 值的模型意味著它需要更多的計算資源進行訓練和推理,但它也可能獲得更好的性能。
Jetson Nano 配備了 472 GFLOPS 的 GPU 計算能力,而根據官方數據,Raspberry Pi 4B 的浮點性能約為 3 GFLOPS。這可以解釋上述情況。
未來與展望
隨著人工智能技術的不斷發展,嵌入式機器人的應用前景越來越廣闊。未來,我們可以期待這種嵌入式六軸機械臂具有更廣泛的應用領域,涵蓋更多領域。例如,在工業、醫療、農業和教育領域,這種機械臂具有廣泛的應用前景。在工業領域,可用于生產線上的自動化生產,提高生產效率和質量;在醫療領域,可用于手術、康復等方面,幫助醫生更好地為患者服務;在農業部門,可用于農業生產的種植、收獲等各個環節,提高農業生產效率和質量;在教育領域,它可以用于機器人編程教育,幫助學生更好地學習編程和機器人技術。
除了應用領域的擴大,隨著技術的不斷進步,這種機械臂也將不斷發展。例如,未來可能會出現更先進的控制算法,使手臂的運動更加精確和靈活;更先進的傳感器技術可能會出現,使手臂能夠更準確地感知周圍環境;更先進的深度學習技術可能會出現,使手臂能夠智能地完成各種任務。總之,這種嵌入式六軸機械臂具有廣闊的應用前景和發展空間,我們可以期待它在未來繼續創新和進步。
審核編輯黃宇
-
機器人
+關注
關注
213文章
29748瀏覽量
212941 -
機械臂
+關注
關注
13文章
554瀏覽量
25398 -
大象機器人
+關注
關注
0文章
86瀏覽量
121
發布評論請先 登錄
Nordic先進SoC為LE Audio帶來強大功能
Made with KiCad(126):Antmicro OV5640 雙攝像頭子板
大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產品
大象機器人推出myCobot 280 RDK X5,攜手地瓜機器人共建智能教育機

超高性價比掌上型HIL丨EGBox Nano正式發布
研華NVIDIA Jetson Orin Nano系統支持Super Mode

探索NVIDIA Jetson與DeepSeek融合的無限可能

多功能復合機器人設計方案

如何使用PLC控制myCobot 320機械臂

使用myCobot 280機械臂結合ROS2系統搭建機械分揀站

在Mac上使用Docker構建noVNC環境并運行MyCobot
NVIDIA發布高性價比生成式AI超級計算機
NVIDIA Jetson Orin Nano開發者套件的新功能
NVIDIA發布小巧高性價比的Jetson Orin Nano Super開發者套件
使用myAGV、Jetson Nano主板和3D攝像頭,實現了RTAB-Map的三維建圖功能!





 工商網監
工商網監
評論