") 機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)結(jié)構(gòu)體功能上線,助力客戶高效開發(fā)
機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)結(jié)構(gòu)體功能上線,助力客戶高效開發(fā)


應(yīng)用背景
運(yùn)動(dòng)控制器正朝著高速度、高精度、開放式的方向發(fā)展,不僅對(duì)運(yùn)動(dòng)控制功能精益求精,還增加了視覺相關(guān)的定位、測(cè)量、檢測(cè)和識(shí)別等,多種功能的穿插使用進(jìn)一步增加了在編程設(shè)計(jì)代碼時(shí)的復(fù)雜程度。
為了給客戶提供更好地軟件框架,簡(jiǎn)化程序結(jié)構(gòu)、節(jié)省內(nèi)存空間、提高代碼可讀性。
正運(yùn)動(dòng)技術(shù)在VPLC532E機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)上增加了結(jié)構(gòu)體功能,方便客戶在大型項(xiàng)目上更高效的進(jìn)行項(xiàng)目開發(fā)。

VPLC532E是正運(yùn)動(dòng)推出的一款EtherCAT視覺總線控制器,控制器集成了2個(gè)千兆以太網(wǎng)以及2個(gè)USB3.0、2個(gè)USB2.0接口,支持多種工業(yè)相機(jī),支持多種視覺功能和復(fù)雜的運(yùn)動(dòng)控制功能。

VPLC532E硬件介紹
1.集成RS232、RS485、CAN接口、2路USB3.0、2路USB2.0接口。
2.2路千兆EtherNet、1路百兆EtherCAT、6個(gè)本地軸接口。
3.24進(jìn)12出數(shù)字IO,其中4路高速輸出,4路高速輸入、2路模擬量輸出。
4.支持市場(chǎng)主流的USB3.0相機(jī)與GigE相機(jī)。
VPLC532E功能介紹
1.支持最多達(dá)32軸直線插補(bǔ)、任意空間圓弧插補(bǔ)、螺旋插補(bǔ)、樣條插補(bǔ)。2.支持電子凸輪、電子齒輪、位置鎖存、同步跟隨、虛擬軸等功能。3.支持硬件比較輸出(HW_PSWITCH2),硬件定時(shí)器,運(yùn)動(dòng)中精準(zhǔn)輸出。4.支持脈沖閉環(huán),螺距補(bǔ)償?shù)裙δ堋?.支持ZBasic多文件多任務(wù)編程。6.多種程序加密手段,保護(hù)客戶的知識(shí)產(chǎn)權(quán)。7.掉電檢測(cè),掉電存儲(chǔ)。
實(shí)現(xiàn)指令
1.STRUCTURE --結(jié)構(gòu)體定義
Structure結(jié)構(gòu)名稱
Dim成員1名稱[As數(shù)據(jù)類型1]
......
Dim成員n名稱[(數(shù)組長(zhǎng)度)][As數(shù)據(jù)類型1]End Structure
2.FLASH_WRITEDBL-- flash存儲(chǔ)-double
FLASH_WRITEDBL sect_num [, varname] [, arrayname] [, arrayname(a)] [, arrayname(a,length)]
sect_num:flash塊編號(hào),不同類型不一樣。
varname:變量名。
arrayname:數(shù)組名,可以為TABLE,VR,MODBUS。
a:操作的數(shù)組索引。
length:操作的數(shù)組元素個(gè)數(shù)。
結(jié)構(gòu)體應(yīng)用例程
該例程主要是對(duì)三軸的機(jī)械參數(shù)和配方文件以結(jié)構(gòu)體框架來(lái)實(shí)現(xiàn),通過(guò)結(jié)構(gòu)體變量嵌套使用來(lái)減少變量,降低內(nèi)存占用,提高代碼的可復(fù)用性。
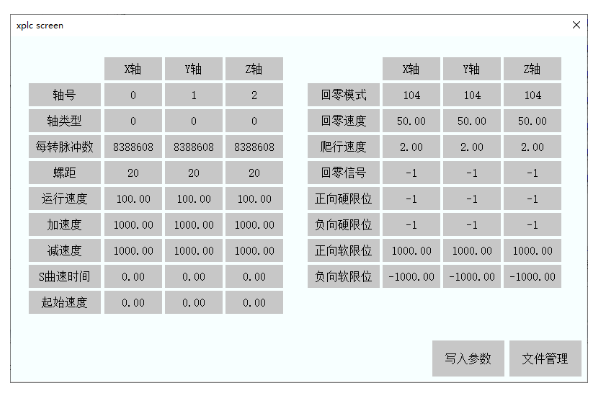
1.創(chuàng)建結(jié)構(gòu)體變量
GLOBALSUBHMI_INIT() GLOBALgv_CurParamNum'當(dāng)前配方號(hào) gv_CurParamNum=0 GLOBALgv_PageNum'頁(yè)碼 gv_PageNum=0 GLOBALCONSTgv_SysMaxAxis=3'最大軸數(shù) GLOBALSTRUCTUREAxisParam '''軸參數(shù) DIMNo'軸號(hào) DIMAxisAtype'軸類型 DIMAxisDpos'軸的當(dāng)前位置 DIMOnePulses'軸電機(jī)一圈脈沖數(shù) DIMAxisPitch'軸螺距 DIMAxisSpeed'軸的運(yùn)動(dòng)速度 DIMAxisAccel'軸的加速度 DIMAxisDecel'軸的減速度 DIMAxisSramp'軸的S曲線時(shí)間 DIMAxisLspeed'軸的起始速度 DIMFsLimit'軸正限位 DIMRsLimit'軸負(fù)限位 '''回零參數(shù) DIMDatumMode'軸回零模式 DIMBackZeroSpeed'軸的回零速度 DIMAxisCreep'軸的回零第2段速度 DIMDatumIn'軸原點(diǎn)信號(hào) DIMFwdIn'軸正限位信號(hào) DIMRevIn'軸負(fù)限位信號(hào) ENDSTRUCTURE GLOBALSTRUCTURESysParam DIMSysAxis(gv_SysMaxAxis)ASAxisParam'系統(tǒng)軸數(shù) DIMFileName(50)'參數(shù)文件名 ENDSTRUCTURE GLOBALgs_SysParam(50)ASSysParam'定義系統(tǒng)結(jié)構(gòu)體變量 LOCALlv_i FORlv_i=0togv_SysMaxAxis-1 '初始化軸參數(shù)變量 gs_SysParam(0).SysAxis(lv_i).No=lv_i gs_SysParam(0).SysAxis(lv_i).AxisAtype=0'軸類型 gs_SysParam(0).SysAxis(lv_i).OnePulses=8388608'軸電機(jī)一圈脈沖數(shù) gs_SysParam(0).SysAxis(lv_i).AxisPitch=20'軸螺距 gs_SysParam(0).SysAxis(lv_i).AxisSpeed=100'軸的運(yùn)動(dòng)速度 gs_SysParam(0).SysAxis(lv_i).AxisAccel=1000'軸的加速度 gs_SysParam(0).SysAxis(lv_i).AxisDecel=1000'軸的減速度 gs_SysParam(0).SysAxis(lv_i).AxisSramp=0'軸的S曲線時(shí)間 gs_SysParam(0).SysAxis(lv_i).AxisLspeed=0'軸的起始速度 '初始化回零參數(shù)變量 gs_SysParam(0).SysAxis(lv_i).DatumMode=104'軸的回零模式 gs_SysParam(0).SysAxis(lv_i).BackZeroSpeed=50'軸的回零速度 gs_SysParam(0).SysAxis(lv_i).AxisCreep=2'軸的回零第2段速度 gs_SysParam(0).SysAxis(lv_i).DatumIn=-1'軸的回零信號(hào) gs_SysParam(0).SysAxis(lv_i).FwdIn=-1'軸的正向硬限位信號(hào) gs_SysParam(0).SysAxis(lv_i).RevIn=-1'軸的負(fù)向硬限位信號(hào) gs_SysParam(0).SysAxis(lv_i).FsLimit=1000'軸正限位 gs_SysParam(0).SysAxis(lv_i).RsLimit=-1000'軸負(fù)限位 '初始化參數(shù)文件 gs_SysParam(0).FileName="NONE"'初始化參數(shù)文件名 NEXT FORlv_i=0to49 gs_SysParam(lv_i)=gs_SysParam(0)'初始化其他配方參數(shù) NEXT ENDSUB
2.保存配置文件
GLOBALSUBSaveCurParam()
LOCALiflsflag
iflsflag=70214733
FLASH_WRITEDBLgv_CurParamNum,iflsflag,gs_SysParam(gv_CurParamNum)
?"下載成功"
ENDSUB
3.讀取配置文件
GLOBALSUBLoadCurParam() LOCALiflsflag,lv_i,addnum FORlv_i=0TO49 iflsflag=0 FLASH_READDBLlv_i,iflsflag IFiflsflag=70214733THEN FLASH_READ2DBLlv_i,1,gs_SysParam(lv_i) addnum=addnum+1 ENDIF NEXT ?"上傳完成,上傳配置文件數(shù):"addnum ENDSUB
4.刪除配置文件
GLOBALSUBDeleCurParam() LOCALlv_i FORlv_i=0togv_SysMaxAxis-1 '初始化軸參數(shù)變量 gs_SysParam(gv_CurParamNum).SysAxis(lv_i).No=lv_i gs_SysParam(gv_CurParamNum).SysAxis(lv_i).AxisAtype=0'軸類型 gs_SysParam(gv_CurParamNum).SysAxis(lv_i).OnePulses=8388608'軸電機(jī)一圈脈沖數(shù) gs_SysParam(gv_CurParamNum).SysAxis(lv_i).AxisPitch=20'軸螺距 gs_SysParam(gv_CurParamNum).SysAxis(lv_i).AxisSpeed=100'軸的運(yùn)動(dòng)速度 gs_SysParam(gv_CurParamNum).SysAxis(lv_i).AxisAccel=1000'軸的加速度 gs_SysParam(gv_CurParamNum).SysAxis(lv_i).AxisDecel=1000'軸的減速度 gs_SysParam(gv_CurParamNum).SysAxis(lv_i).AxisSramp=0'軸的S曲線時(shí)間 gs_SysParam(gv_CurParamNum).SysAxis(lv_i).AxisLspeed=0'軸的起始速度 '初始化回零參數(shù)變量 gs_SysParam(gv_CurParamNum).SysAxis(lv_i).DatumMode=104'軸的回零模式 gs_SysParam(gv_CurParamNum).SysAxis(lv_i).BackZeroSpeed=50'軸的回零速度 gs_SysParam(gv_CurParamNum).SysAxis(lv_i).AxisCreep=2'軸的回零第2段速度 gs_SysParam(gv_CurParamNum).SysAxis(lv_i).DatumIn=-1'軸的回零信號(hào) gs_SysParam(gv_CurParamNum).SysAxis(lv_i).FwdIn=-1'軸的正向硬限位信號(hào) gs_SysParam(gv_CurParamNum).SysAxis(lv_i).RevIn=-1'軸的負(fù)向硬限位信號(hào) gs_SysParam(gv_CurParamNum).SysAxis(lv_i).FsLimit=1000'軸正限位 gs_SysParam(gv_CurParamNum).SysAxis(lv_i).RsLimit=-1000'軸負(fù)限位 '初始化參數(shù)文件 gs_SysParam(gv_CurParamNum).FileName="NONE"'初始化參數(shù)文件名 NEXT LOCALiflsflag iflsflag=0 FLASH_WRITEDBLgv_CurParamNum,iflsflag,gs_SysParam(gv_CurParamNum) ?"刪除成功" ENDSUB
本次,正運(yùn)動(dòng)技術(shù)機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)結(jié)構(gòu)體功能上線,助力客戶高效開發(fā),就分享到這里。
更多精彩內(nèi)容請(qǐng)關(guān)注“正運(yùn)動(dòng)小助手”公眾號(hào),需要相關(guān)開發(fā)環(huán)境與例程代碼,請(qǐng)咨詢正運(yùn)動(dòng)技術(shù)銷售工程師。
本文由正運(yùn)動(dòng)技術(shù)原創(chuàng),歡迎大家轉(zhuǎn)載,共同學(xué)習(xí),一起提高中國(guó)智能制造水平。文章版權(quán)歸正運(yùn)動(dòng)技術(shù)所有,如有轉(zhuǎn)載請(qǐng)注明文章來(lái)源。
審核編輯黃宇
-
機(jī)器視覺
+關(guān)注
關(guān)注
163文章
4593瀏覽量
122836 -
一體機(jī)
+關(guān)注
關(guān)注
0文章
1160瀏覽量
33427 -
自動(dòng)化
+關(guān)注
關(guān)注
29文章
5776瀏覽量
84763 -
運(yùn)動(dòng)控制
+關(guān)注
關(guān)注
4文章
717瀏覽量
33534
發(fā)布評(píng)論請(qǐng)先 登錄
工業(yè)一體機(jī)不同的安裝系統(tǒng)對(duì)應(yīng)其應(yīng)用功能有何差異?

觸控一體機(jī)與毛絨玩具的聯(lián)動(dòng),也太可愛了吧 # 觸控一體機(jī)# 瑞芯微# RK3568 #工控一體機(jī) #聯(lián)動(dòng)
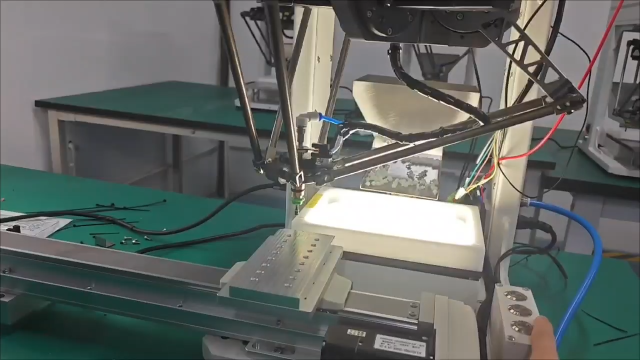
DELTA并聯(lián)機(jī)械手視覺方案榮獲2024年度機(jī)器人應(yīng)用典型案例獎(jiǎng) #正運(yùn)動(dòng)技術(shù) #機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)
超融合一體機(jī)屬于什么設(shè)備
高集成機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)VPLC712!

精準(zhǔn)把握客戶需求,杰和科技一體機(jī)主板實(shí)現(xiàn)三大升級(jí)


國(guó)產(chǎn)錄播一體機(jī),性能卓越,高清視頻采集,助力智慧教育新發(fā)展 #人工智能 #電路知識(shí) #國(guó)產(chǎn)錄播一體機(jī)
雷曼COB智慧會(huì)議一體機(jī)助力企業(yè)高效協(xié)同辦公
聯(lián)想發(fā)布智能體一體機(jī)解決方案
機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)在DELTA并聯(lián)機(jī)械手視覺上下料應(yīng)用

聚徽-工控一體機(jī)有什么創(chuàng)新
機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)VPLC532E在汽車膠帶纏繞的開放式CNC應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論