") 脈沖雷達(dá)信號(hào)處理概述
脈沖雷達(dá)信號(hào)處理概述

編者:對(duì)于信號(hào)處理來(lái)說(shuō),雷達(dá)和通信一直是一體兩面,從MIMO通信到MIMO雷達(dá),從OFDM通信到Multicarrier雷達(dá),很多通信和雷達(dá)領(lǐng)域的前沿技術(shù)都存在事實(shí)上的相互影響。本篇文章將會(huì)介紹劉凡博士在IEEE Communications Letters發(fā)表的系列約稿里的第一篇,雷達(dá)基本原理。在此感謝劉凡博士不辭勞苦的中文翻譯工作,以及在雷達(dá)領(lǐng)域科普的精神和努力
本文旨在面向通信背景的讀者簡(jiǎn)明扼要地概括脈沖雷達(dá)信號(hào)處 理中的基本問(wèn)題和方法 。
由于篇幅所限,本文將不會(huì)對(duì)相關(guān)問(wèn)題做深入討論。有興趣的讀者可以進(jìn)一步閱讀本文后面的參考文獻(xiàn)。
 脈沖雷達(dá)基本模型
脈沖雷達(dá)基本模型
1. 基本原理
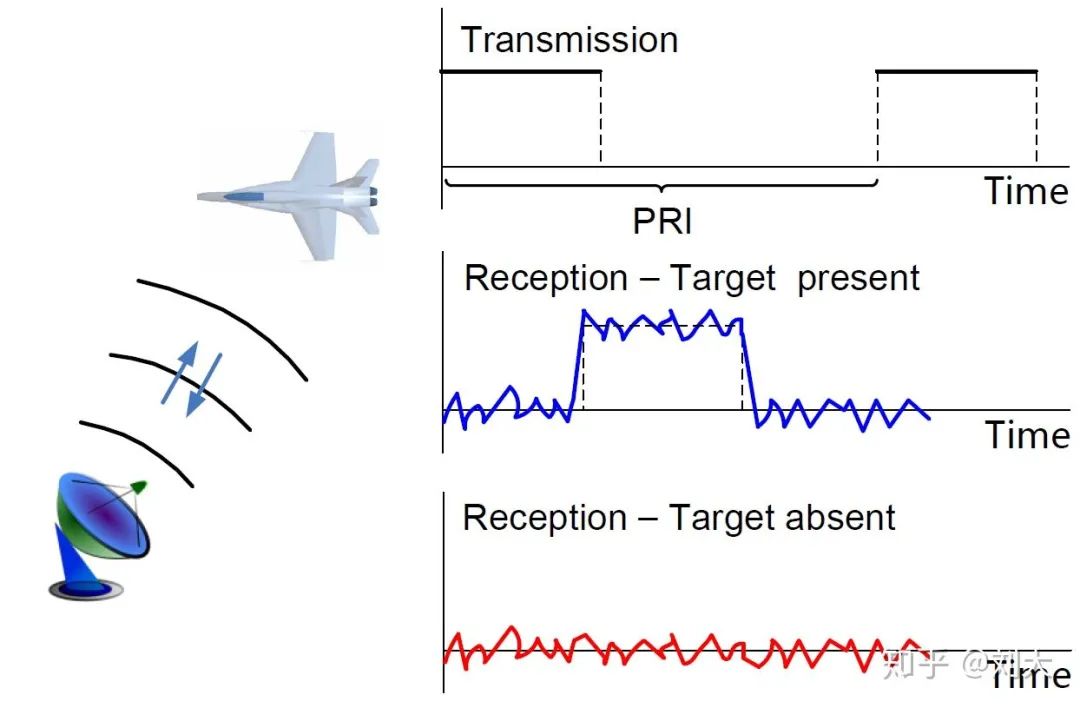
如上圖所示,脈沖式雷達(dá)的基本工作流程,我們可以做如下闡述:
雷達(dá)首先發(fā)射一個(gè)探測(cè)脈沖,脈沖信號(hào)到達(dá)目標(biāo)后被目標(biāo)反射至雷達(dá)端。這一回波中包含了目標(biāo)距離、速度、角度等參數(shù)信息。雷達(dá)的任務(wù)是對(duì)回波進(jìn)行處理提取出目標(biāo)信息,從而對(duì)目標(biāo)進(jìn)行定位或跟蹤。
由于雷達(dá)周期性地發(fā)射信號(hào)并接收回波,這一發(fā)射-接收循環(huán)通常被稱為脈沖重復(fù)周期(Pulse Repetition Interval, PRI)。類似地,一秒鐘發(fā)射的脈沖個(gè)數(shù)被定義為脈沖重復(fù)頻率(Pulse Repetition Frequency, PRF)。

配圖僅為示意
那么延續(xù)前文思路,我們?nèi)绾谓o出簡(jiǎn)潔的雷達(dá)建模?



注意:除了噪聲以外,雷達(dá)還會(huì)收到來(lái)自其他方位的干擾信號(hào)。這些干擾可以來(lái)自其他信號(hào)源,也可以是不感興趣的目標(biāo)或者障礙物反射至雷達(dá)的回波。一般將后者稱為 雜波 (Clutter) 。通常需要對(duì)雜波進(jìn)行抑制,以免對(duì)感興趣的目標(biāo)造成干擾。
受限于篇幅,我們將不在此文中討論雜波抑制問(wèn)題。
2.目標(biāo)檢測(cè)問(wèn)題
通常我們認(rèn)為,雷達(dá)信號(hào)處理關(guān)心兩類基本問(wèn)題: 檢測(cè) (Detection)和 估計(jì) (Estimation)。
其中,最簡(jiǎn)單的檢測(cè)問(wèn)題一般只考慮目標(biāo)是否存在,通常可以建模為如下二元假設(shè)檢驗(yàn)(Binary Hypothesis Testing):


那么如何求解呢?

這一過(guò)程可以表示為


常用的檢測(cè)器包括似然比檢驗(yàn)(Likelihood Ratio Test, LRT),廣義似然比檢驗(yàn)(Generalized Likelihood Ratio Test, GLRT),Rao檢驗(yàn)(Rao Test)和Wald檢驗(yàn)(Wald Test)等。
此外,為衡量目標(biāo)檢測(cè)的好壞,人們提出了多種評(píng)價(jià)指標(biāo)來(lái)描述檢測(cè)器的性能,最為常用的是檢測(cè)概率(Detection Probability)和虛警概率(False-Alarm Probability)。


除以上概率指標(biāo)外,通常還關(guān)心所謂的 漏警概率 (False-Dismissal Probability),即存在目標(biāo)但雷達(dá)判斷目標(biāo)不存在的概率,可記為
。
注意相比于漏警,虛警對(duì)雷達(dá)造成的傷害更大。因?yàn)橐坏┡袛嗄繕?biāo)存在,雷達(dá)就要?jiǎng)佑糜布托盘?hào)處理資源來(lái)對(duì)目標(biāo)進(jìn)行進(jìn)一步探測(cè)與跟蹤,虛警情形下,這將造成雷達(dá)資源的嚴(yán)重浪費(fèi)。
有鑒于此,目標(biāo)檢測(cè)器的設(shè)計(jì)通常需要遵循所謂的奈曼-皮爾遜準(zhǔn)則(Neyman-Pearson Criterion)。簡(jiǎn)言之,即在給定最小可容忍恒虛警概率的條件下最大化檢測(cè)概率。
3. 參數(shù)估計(jì)問(wèn)題



在實(shí)際情況中,一般需要針對(duì)這些參數(shù)設(shè)計(jì)獨(dú)立的估計(jì)器,我們分別對(duì)此進(jìn)行闡述。

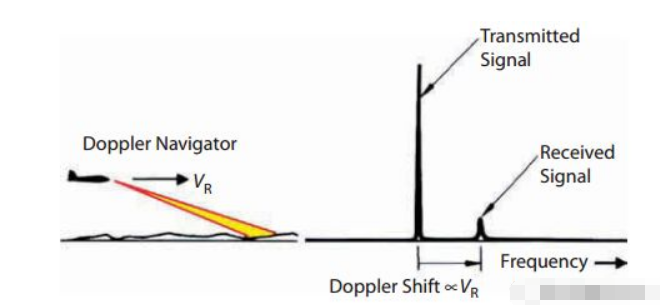
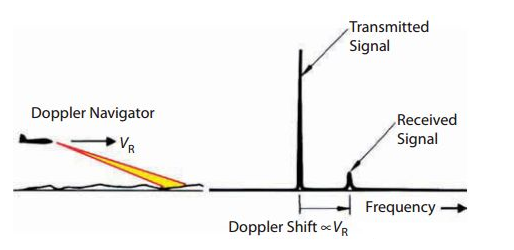
- 對(duì)于速度估計(jì),由于單個(gè)脈沖持續(xù)時(shí)間較短,其多普勒相移難以識(shí)別,通常需要接收多個(gè)脈沖的回波確保多普勒相移積累得足夠大,再通過(guò)快速傅里葉變換(Fast Fourier Transform, FFT)來(lái)估計(jì)多普勒頻率。這部分稱為慢時(shí)間(Slow-Time)信號(hào)處理,即以一個(gè)脈沖對(duì)應(yīng)一個(gè)慢時(shí)間單位的脈沖間信號(hào)處理。
- 對(duì)于角度估計(jì),可以采用經(jīng)典的基于子空間的到達(dá)角估計(jì)算法,例如MUSIC或者ESPIRIT。
估計(jì)器的性能通常可以用均方誤差(Mean Squared Error, MSE)進(jìn)行描述。以角度估計(jì)為例,其均方誤差定義為


作為一種替代手段,經(jīng)常考慮的一個(gè)經(jīng)典的性能指標(biāo)是所謂的克拉美-羅下界(Cramér–Rao Lower Bound, CRLB)。簡(jiǎn)而言之,克拉美-羅界是所有無(wú)偏估計(jì)器的方差的下界(無(wú)偏估計(jì)定義為估計(jì)值的數(shù)學(xué)期望為真值的估計(jì)器,因此其方差等于MSE)。
這一下界指出,無(wú)偏估計(jì)器的估計(jì)方差應(yīng)至少與Fisher信息(Fisher Information)的逆相當(dāng),即

4. 總結(jié)
本文對(duì)脈沖式雷達(dá)的基本原理進(jìn)行了簡(jiǎn)介,并重點(diǎn)介紹了雷達(dá)信號(hào)處理的兩個(gè)基本問(wèn)題:目標(biāo)檢測(cè)與參數(shù)估計(jì)。
由于篇幅所限,本文所考慮的只是最基本的點(diǎn)目標(biāo)模型,對(duì)于雷達(dá)系統(tǒng)中的其他重要概念,如雜波干擾、擴(kuò)展目標(biāo)(Extended Target)、波形設(shè)計(jì)等均未作介紹。
-
ofdm
+關(guān)注
關(guān)注
6文章
350瀏覽量
57660 -
通信
+關(guān)注
關(guān)注
18文章
6206瀏覽量
137836 -
信號(hào)處理
+關(guān)注
關(guān)注
48文章
1056瀏覽量
104107 -
MIMO
+關(guān)注
關(guān)注
12文章
601瀏覽量
78027 -
雷達(dá)
+關(guān)注
關(guān)注
50文章
3119瀏覽量
120127
發(fā)布評(píng)論請(qǐng)先 登錄
單脈沖雷達(dá)是指什么?
雷達(dá)系統(tǒng)的組成
基于無(wú)載頻脈沖雷達(dá)信號(hào)等幅度追蹤法檢測(cè)生命信號(hào)
一種低重頻脈沖雷達(dá)的速度解算方法

雷達(dá)信號(hào)處理基礎(chǔ)_部分1
雷達(dá)信號(hào)處理基礎(chǔ)_部分2
雷達(dá)信號(hào)處理基礎(chǔ)_部分3
脈沖雷達(dá)的優(yōu)勢(shì)_脈沖雷達(dá)的波形參數(shù)
科普-脈沖雷達(dá)的基礎(chǔ)知識(shí)
脈沖雷達(dá)的優(yōu)點(diǎn),脈沖波形參數(shù)
高頻脈沖雷達(dá)物位計(jì)具有哪些應(yīng)用優(yōu)勢(shì)和特點(diǎn)
脈沖雷達(dá)和調(diào)頻連續(xù)波雷達(dá)的區(qū)別
FMCW和線性調(diào)頻脈沖雷達(dá)
如何生成精確的調(diào)頻載波和線性調(diào)頻脈沖雷達(dá)測(cè)試信號(hào)?(二)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論