") 磁場(chǎng)矢量定向控制算法(FOC)簡(jiǎn)介
磁場(chǎng)矢量定向控制算法(FOC)簡(jiǎn)介
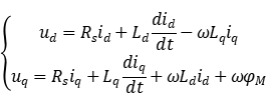
因?yàn)榱綋Q向法存在一些缺點(diǎn),F(xiàn)OC算法有控制起來(lái)轉(zhuǎn)矩波動(dòng)小,動(dòng)態(tài)響應(yīng)快的特點(diǎn),能讓電機(jī)轉(zhuǎn)動(dòng)更加平滑并且高效。
FOC算法是什么原理呢?
簡(jiǎn)單來(lái)說(shuō),其實(shí)就是FOC控制算法可以實(shí)現(xiàn)對(duì)電壓的矢量控制,間接地控制電流。這種算法其實(shí)可以看做是正弦波控制的升級(jí)版,即通過(guò)實(shí)現(xiàn)電流矢量的控制,讓電機(jī)定子磁場(chǎng)也實(shí)現(xiàn)矢量控制效果。進(jìn)而控制電機(jī)定子磁場(chǎng)方向,讓電機(jī)定子磁場(chǎng)方向與轉(zhuǎn)子磁場(chǎng)方向保持一直角,從而讓電機(jī)實(shí)現(xiàn)最大扭矩輸出。
那么FOC算法是怎么實(shí)現(xiàn)的呢?
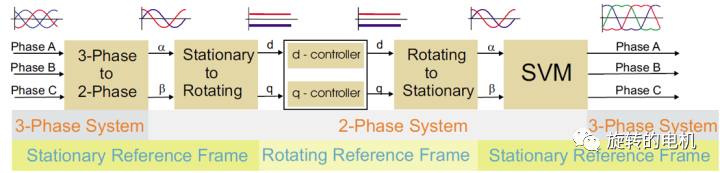
歸納一下,其實(shí)就是對(duì)電機(jī)定子轉(zhuǎn)子的磁場(chǎng)來(lái)建立數(shù)學(xué)坐標(biāo)系,并經(jīng)過(guò)一系列坐標(biāo)變換,再基于目標(biāo)位置、轉(zhuǎn)速、扭矩等計(jì)算輸出目標(biāo)控制占空比(SVPWM)。
為什么要變換坐標(biāo)系呢,因?yàn)閷?duì)于三相直流電機(jī)的數(shù)學(xué)模型,三相坐標(biāo)系計(jì)算起來(lái)很復(fù)雜,但其實(shí)坐標(biāo)軸是相對(duì)靜止的,所以我們可以將三相坐標(biāo)系變換為兩相坐標(biāo)系,以此來(lái)簡(jiǎn)化計(jì)算方法。
0
7
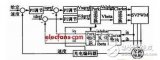
FOC算法控制架構(gòu) (核心)
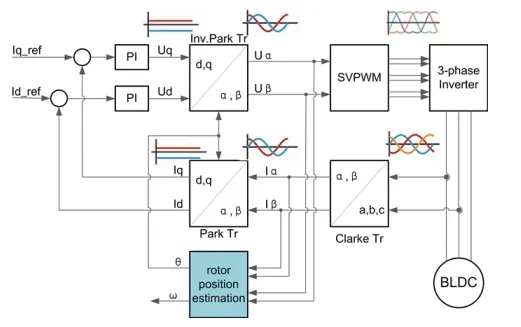
大致畫了一個(gè)FOC控制架構(gòu)的架構(gòu)圖,大家可以很清晰的看到架構(gòu)中包含有哪些模塊。
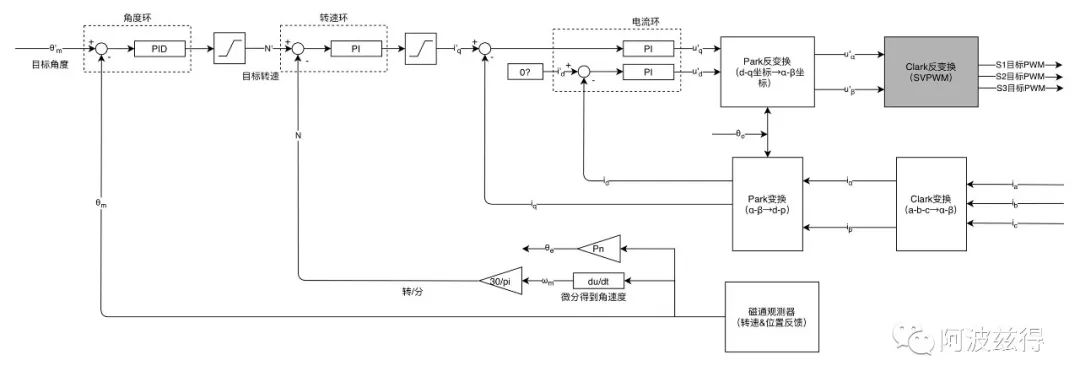
基本上分為Clark變換、Park變換、Park反變換、SVPWM,以及角度環(huán)、轉(zhuǎn)速環(huán)、電流環(huán)等幾部分。
首先我們需要了解的是在電機(jī)定子、轉(zhuǎn)子磁場(chǎng)中,是如何建立數(shù)學(xué)坐標(biāo)系的,明白坐標(biāo)系建立的含義后,這Clark/Park的變換和反變換也就明白了。
0
8
電機(jī)磁場(chǎng)的數(shù)學(xué)模型建立 (核心)
總體示****意圖:
首先我們可以看到這是一個(gè)電機(jī)橫切剖面的俯視圖,帶有NS極的標(biāo)記為轉(zhuǎn)子,轉(zhuǎn)子以ω為轉(zhuǎn)速逆時(shí)針轉(zhuǎn)動(dòng);棕色的圈標(biāo)記為定子,在定子周圍有A、B、C三相通電繞組線圈。
我們可以在圖中看到三個(gè)坐標(biāo)系,分別是A-B-C軸坐標(biāo)系、α-β軸坐標(biāo)系、d-q軸坐標(biāo)系。
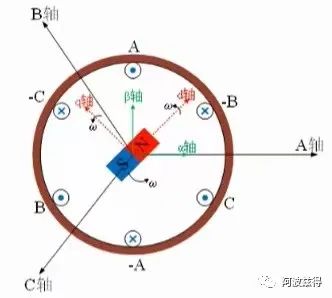
ABC軸坐標(biāo)系建立:

| 坐標(biāo)軸 | A軸、B軸、C軸 |
|---|---|
| 坐標(biāo)軸含義 | 以A、B、C三相繞組線圈通電后,產(chǎn)生的磁感應(yīng)強(qiáng)度N極方向分別為A、B、C軸的方向。 |
| 坐標(biāo)軸性質(zhì) | 靜止坐標(biāo)系 |
| 備注 | 空間上任一矢量在三個(gè)坐標(biāo)系上的投影代表了該矢量在三個(gè)繞組上的分量。 |
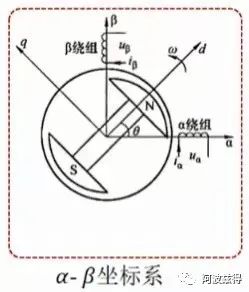
α-β軸坐標(biāo)系建立:
| 坐標(biāo)軸 | α軸、β軸 |
|---|---|
| 坐標(biāo)軸含義 | α軸與三相定子坐標(biāo)系A(chǔ)軸重合,β軸逆時(shí)針超前α軸90度電角度 |
| 坐標(biāo)軸性質(zhì) | 靜止坐標(biāo)系 |
| 備注 | 兩相繞組也能旋轉(zhuǎn)磁場(chǎng),故可以將三相繞組與兩相繞組可以等效,數(shù)學(xué)上用兩相直角坐標(biāo)系描述比較簡(jiǎn)便,所以可以將A-B-C三相坐標(biāo)軸等效為α-β兩相坐標(biāo)軸。 |
d-q軸坐標(biāo)系建立:
| 坐標(biāo)軸 | d軸、q軸 |
|---|---|
| 坐標(biāo)軸含義 | d軸位于轉(zhuǎn)子磁極軸線上,與N極方向相同,q 軸逆時(shí)針超前d 軸90 度空間電角度,該坐標(biāo)系和轉(zhuǎn)子一起在空間上以轉(zhuǎn)子角速度旋轉(zhuǎn) |
| 坐標(biāo)軸性質(zhì) | 旋轉(zhuǎn)坐標(biāo)系 |
| 備注 | 以角速度ω(與轉(zhuǎn)子同一角速度)旋轉(zhuǎn),那么在d-q軸繞組中通以直流電流,將產(chǎn)生一個(gè)旋轉(zhuǎn)磁動(dòng)勢(shì),與靜止的α-β軸中角頻率為ω的交流電流產(chǎn)生的旋轉(zhuǎn)磁動(dòng)勢(shì)相同 |
下次詳細(xì)介紹FOC算法模塊中,Clark變換/反變換及Park變換/反變換的數(shù)學(xué)模型公式計(jì)算。
-
控制算法
+關(guān)注
關(guān)注
4文章
170瀏覽量
22181 -
FOC
+關(guān)注
關(guān)注
21文章
342瀏覽量
44037 -
轉(zhuǎn)子磁場(chǎng)
+關(guān)注
關(guān)注
0文章
2瀏覽量
5337 -
控制電機(jī)
+關(guān)注
關(guān)注
0文章
244瀏覽量
18606
發(fā)布評(píng)論請(qǐng)先 登錄
永磁同步電機(jī)控制系統(tǒng)仿真—FOC控制算法的Simulink模型
FOC控制算法的Simulink模型
無(wú)傳感器磁場(chǎng)定向控制
磁場(chǎng)定向矢量控制(FOC)的技術(shù)核心
PMSM的磁場(chǎng)定向控制
foc跟矢量控制有什么區(qū)別_解析foc驅(qū)動(dòng)技術(shù)
用于永磁同步電機(jī)(PMSM)的磁場(chǎng)定向控制(FOC)的設(shè)計(jì)實(shí)踐
FOC控制算法的概念及原理
無(wú)傳感器磁場(chǎng)定向控制(FOC)風(fēng)機(jī)控制原理
磁場(chǎng)定向控制(FOC)原理分析
foc如何調(diào)位置環(huán) FOC控制原理
電機(jī)控制--FOC的優(yōu)勢(shì)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論