") VASS機器人使用CMT焊接的標準控制應用分析V4.24
VASS機器人使用CMT焊接的標準控制應用分析V4.24
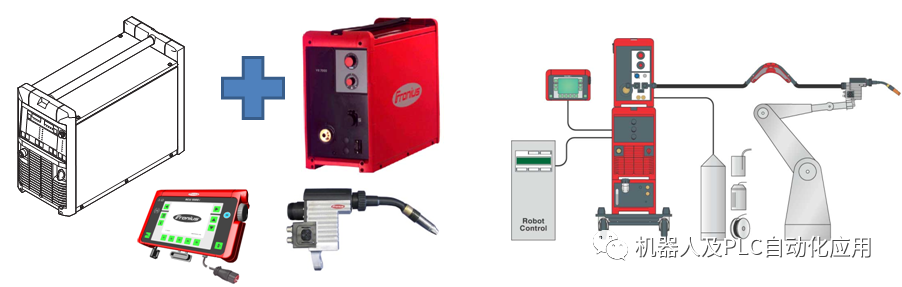
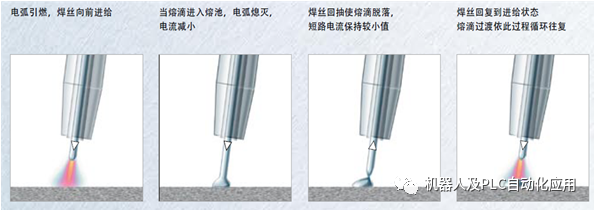
FroniusCMT是一種工作方式技術:
焊接開始,焊槍伺服電機驅(qū)動,焊絲與板材電弧引燃,焊絲融化融滴滴進熔池,當數(shù)字化的控制監(jiān)測到一個短路信號,就會反饋給送絲機,送絲機作出回應,迅速回抽焊絲,從而使得焊絲與熔滴分離。焊絲恢復到進給狀態(tài)電弧再次引燃,循環(huán)往復到焊接結(jié)束,頻率由送絲速度決定。
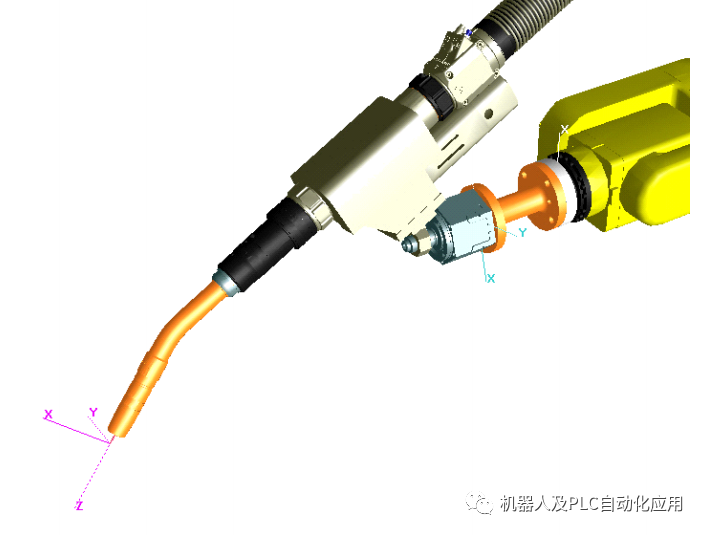
CMTBraze+的焊槍頭較標準的CMT焊槍頭有很大變化
1 滅弧罩內(nèi)置水循環(huán)冷卻
優(yōu)點:
使槍頭及時冷卻,可以長時間進行焊接;
降低了滅弧罩粘連飛濺,易于滅弧罩除塵
2 滅弧罩頭部形狀進行改良
優(yōu)點:
使保護氣體更加集中,節(jié)省氣體流量;
由于氣流集中,降低了飛濺量
CMTBraze+多用于表面件的焊接.
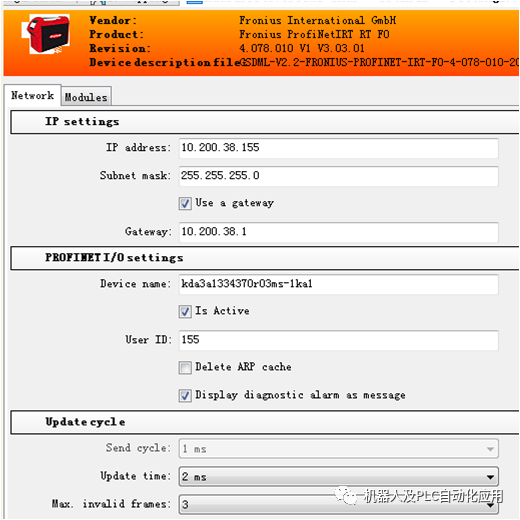
機器人組態(tài)Fronius焊機

-----USER用戶程序用法-----------
Tech_ MS Steuerung= Nr1 Einschalten - BrennerNr = 1 ProgNr = 20 NahtNr = 1 EIN
VW_USR_R (#USR_ADV,104,8,1,0,1,20,1,TRUE)
VW_USR_R (#USR_MAIN,104,8,1,0,1,20,1,TRUE)
P1=8 CMT1/P2=9CMT2
P2=1 激活程序號是否一致功能、
P2 =2、3是用來激活記住已焊接過后的合格的焊點
P3=1 激活,通過P6來控制該點是否焊接-
P4用來與P2配合事項一些對CMT的TCP點校正的方法使用
P5 程序號
P6 給PLC的進程號
F596 用于記錄焊點號
| IO點 輸入 輸出 | ||
|---|---|---|
|
1857運行 進程釋放
|
||
|
1858 沒有總故障 故障確認 |
||
|
1859是可用弧 啟動過程 |
||
|
1860激活的過程 沒有過程 |
||
|
1861 大電流信號 保留 |
||
|
1862位置符合 保留 |
||
|
1863 發(fā)現(xiàn)位置 開始位置搜索 |
||
|
1864 燃燒器清洗開始 清潔燃燒器 |
||
|
1865沒有維修警告 保留 |
||
|
1866沒有內(nèi)部錯誤 保留 |
||
|
1867程序可用 保留 |
||
|
1868 沒有外部的操作停止 保留 |
||
|
1869氣體i.O. 沖氣? |
||
|
1870冷卻液i.O. 吹起 |
||
|
1871轉(zhuǎn)移監(jiān)控i.O. 噴霧 |
||
|
1872 有焊絲存在 送絲 (無動力) |
||
|
1873 送絲i.O. 手動rueck線(不包括電力) |
||
|
1874燃燒器關閉i.O. 保留 |
||
|
1875保留 保留 |
||
|
1876開啟節(jié)能模式 節(jié)能模式 |
||
|
1877處于自動 保留 |
||
|
1878 反饋W1模式 W1模式 |
||
|
1879反饋W2模式 W2模式 |
||
|
1880反饋W4模式 W4模式 |
||
|
1881反饋程序W1 程序撥號W1 |
||
|
1882反饋程序W2 程序撥號W2 |
||
|
1883反饋程序W4 程序撥號W4 |
||
|
1884反饋程序W8 程序撥號W8 |
||
|
1885反饋程序W16 程序撥號W16 |
||
|
1886 反饋程序W32 程序撥號W32 |
||
|
1887反饋程序W64 程序撥號W64 |
||
|
1888反饋程序W1 程序撥號W128 A/E 2145-2152 外部銑削清槍嘴(沒有用) A520清銑噴嘴(沒有用)?
審核編輯 :李倩 |
||
-
機器人
+關注
關注
213文章
29567瀏覽量
211939 -
焊接
+關注
關注
38文章
3402瀏覽量
61094 -
電弧
+關注
關注
7文章
281瀏覽量
33370
原文標題:VASS 機器人使用CMT焊接的標準控制應用分析V4.24
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
機器人焊接技術在車身焊接工藝的應用
ABB焊接機器人問題
基于機器人的曲線焊接系統(tǒng)
機器人焊接技術在車身焊接工藝的應用
焊接機器人的結(jié)構與原理
工業(yè)機器人焊接實操工作站分享
機器人遙控焊接力覺傳感與控制
焊接機器人常見故障保養(yǎng)問題分析與解決辦法
如何檢驗焊接機器人焊接質(zhì)量?
焊接機器人運動控制是什么?

焊接機器人運動控制是什么?
自動焊接機器人如何使用
自動焊接機器人的電流和電壓是如何控制的?
機器人焊接與人工焊接對比分析






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論