") Buck電路之CCM、DCM、BCM的定義
Buck電路之CCM、DCM、BCM的定義
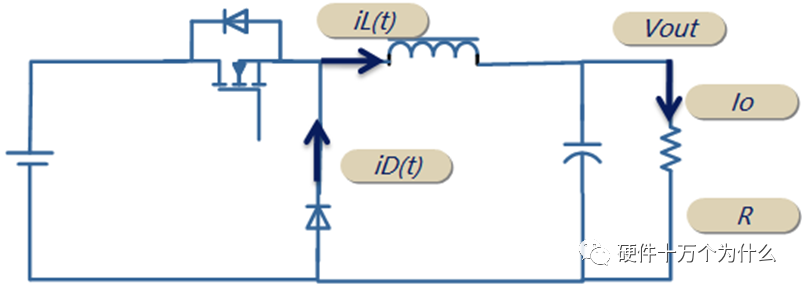
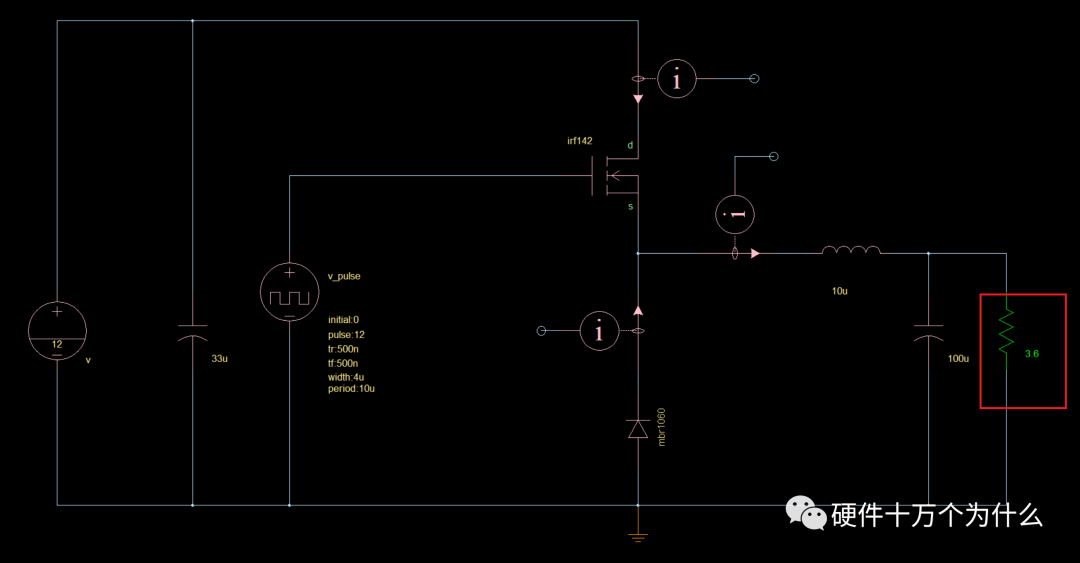
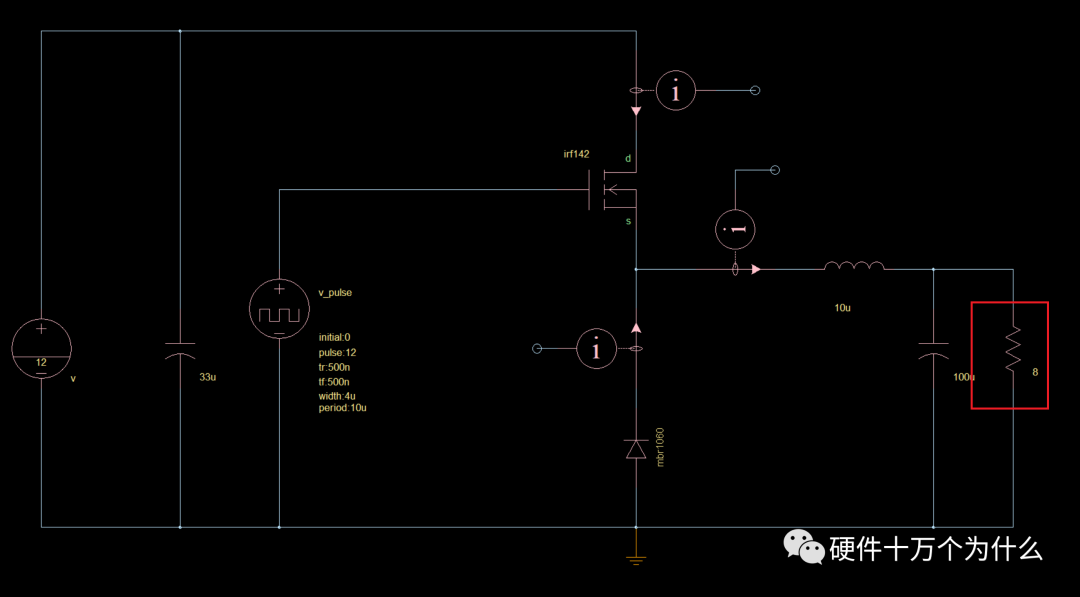
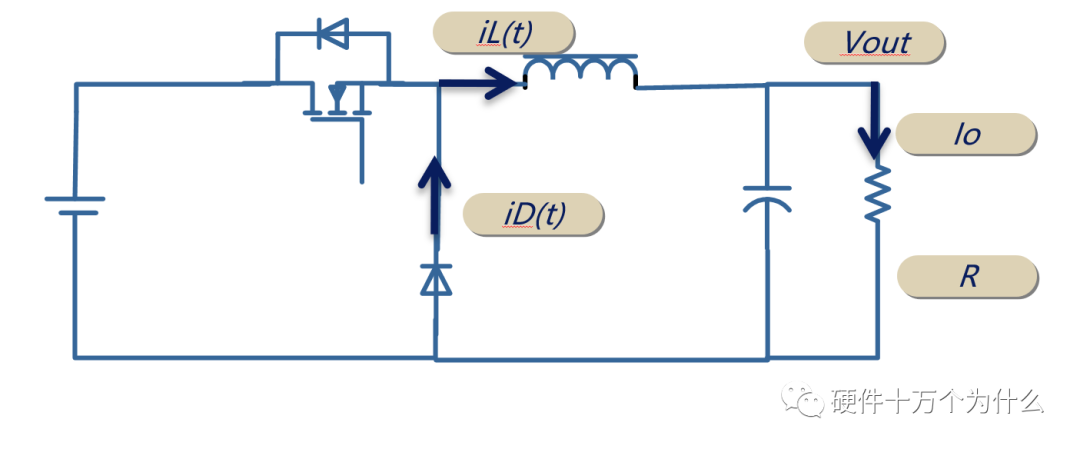
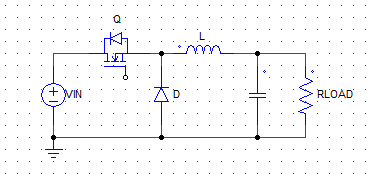
一、Buck開關(guān)型調(diào)整器:
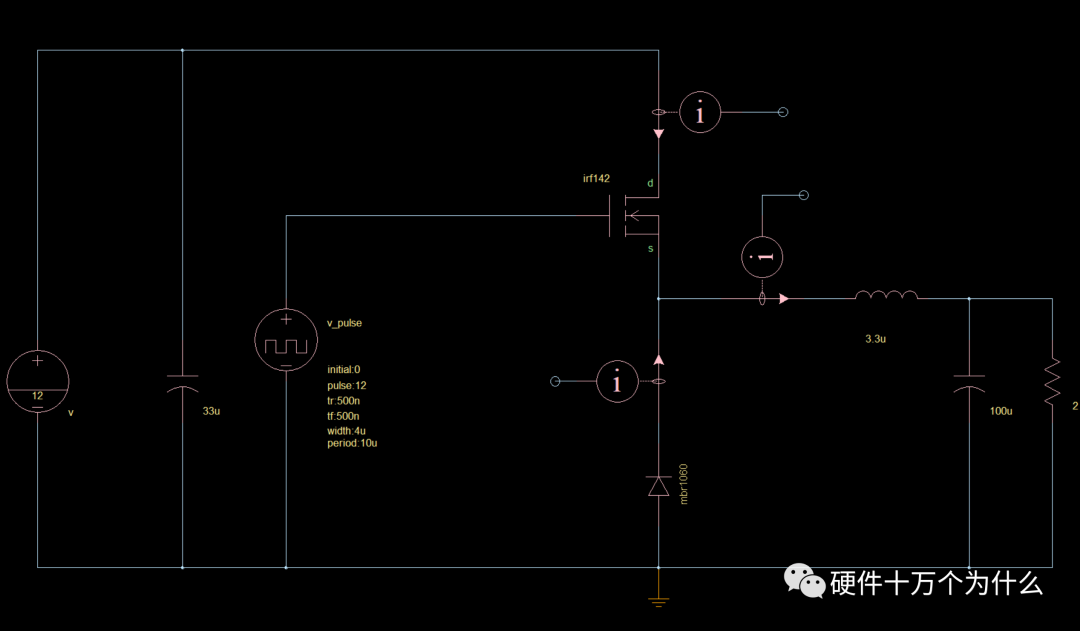
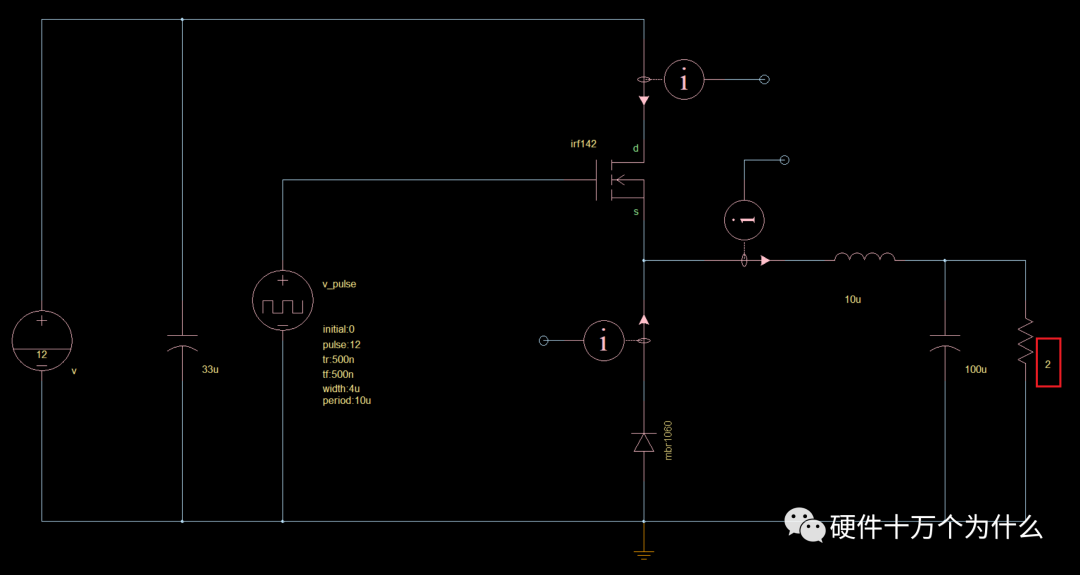
可以看到:
1、輸入電壓12V
2、輸入電容33uF
3、控制脈沖:電壓12V,上升時(shí)間500ns,下降時(shí)間500ns,脈寬4us,周期10us
4、輸出電感3.3uH
5、輸出電容100uF
二、CCM、DCM、BCM的定義:
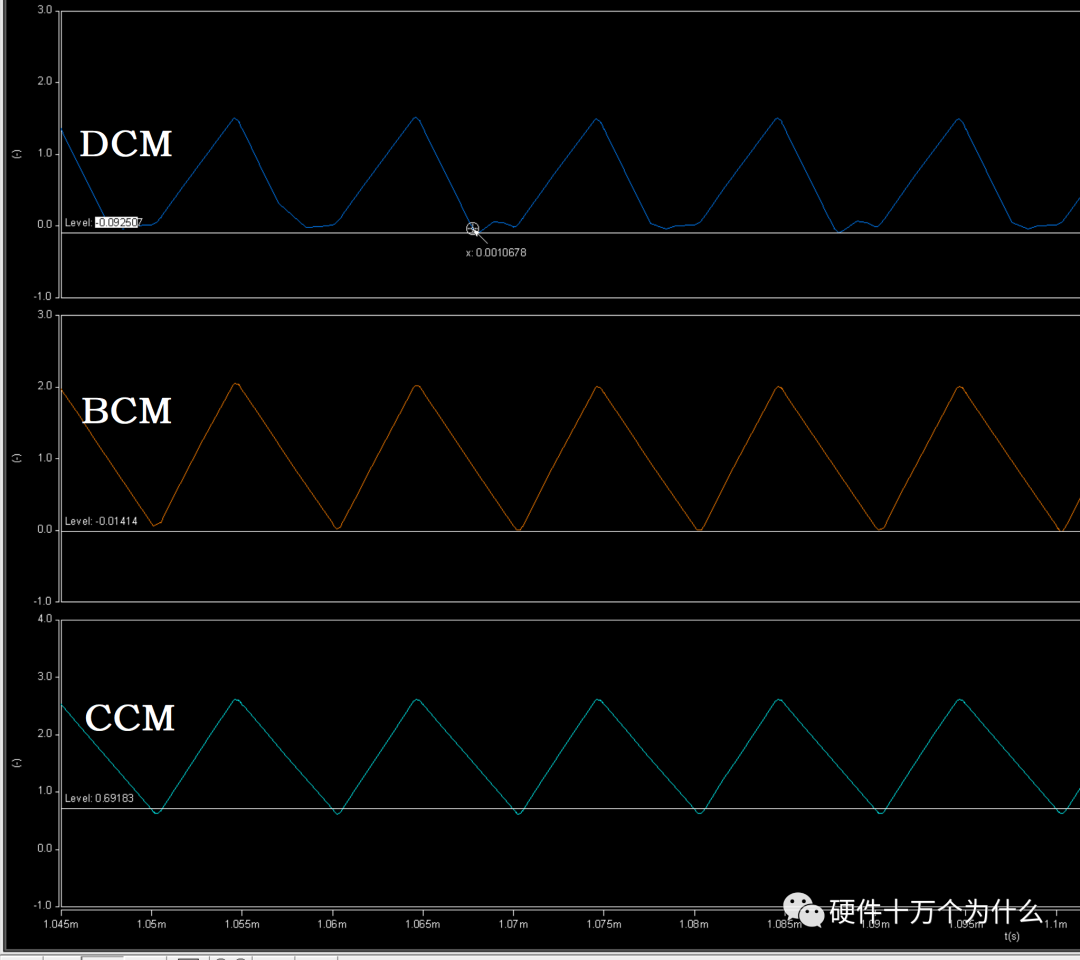
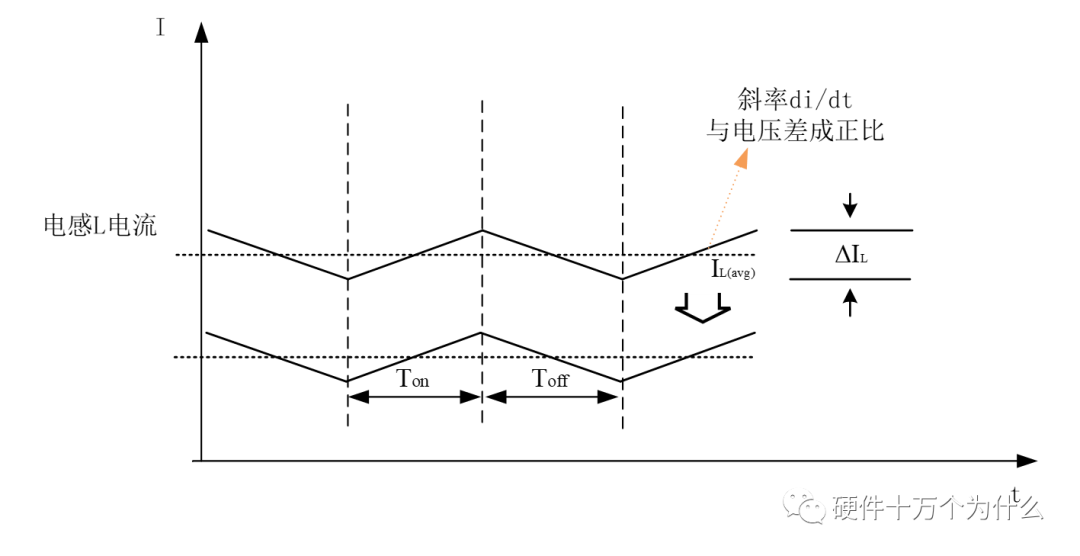
1、CCM (ContinuousConduction Mode),連續(xù)導(dǎo)通模式:在一個(gè)開關(guān)周期內(nèi),電感電流從不會(huì)達(dá)到0A。或者說電感從不“復(fù)位”,意味著在開關(guān)周期內(nèi)電感磁通從不回到0,功率管閉合時(shí),線圈中還有電流流過。
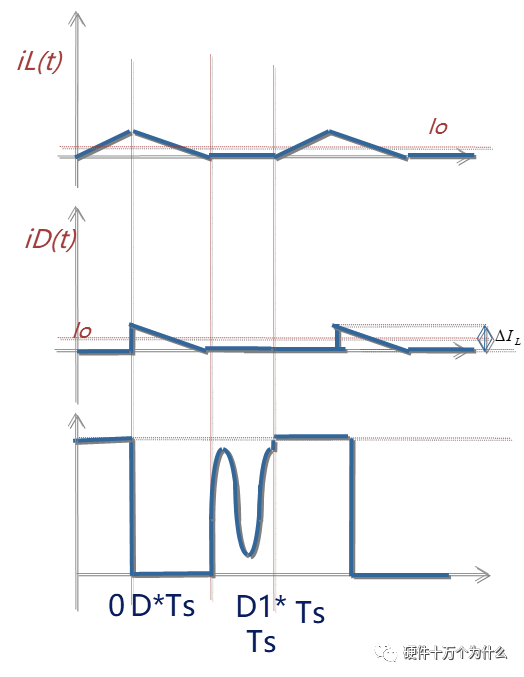
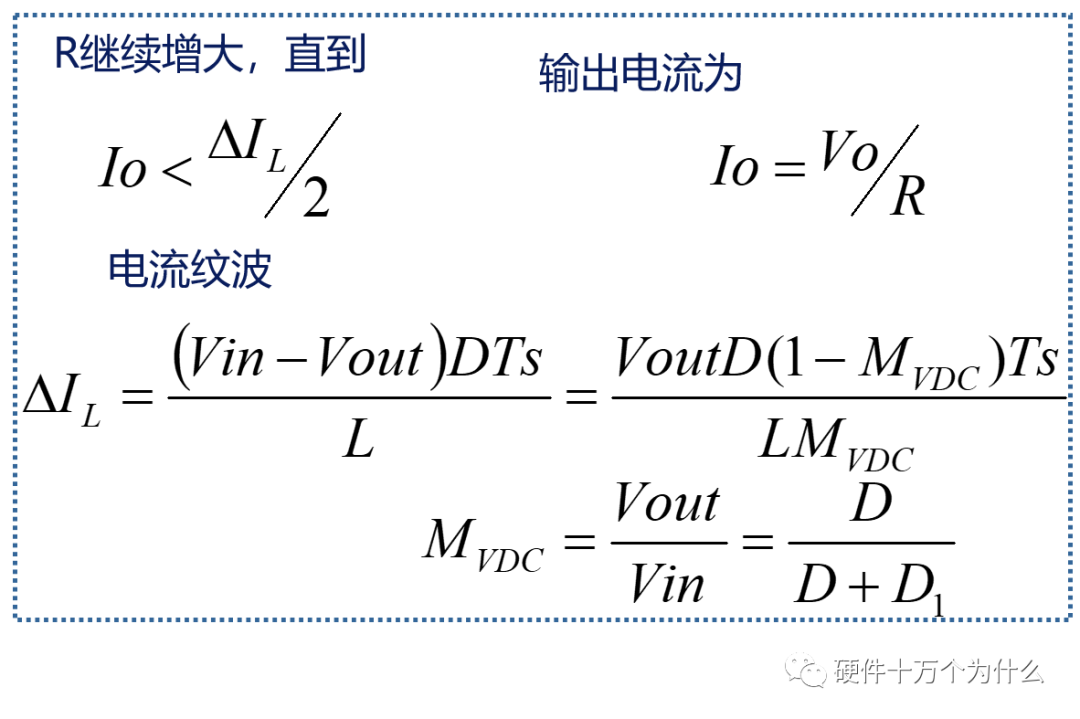
2、DCM,(Discontinuous Conduction Mode)非連續(xù)導(dǎo)通模式:在開關(guān)周期內(nèi),電感電流總會(huì)到0,意味著電感被適當(dāng)?shù)亍皬?fù)位”,即功率開關(guān)閉合時(shí),電感電流為零。
3、BCM(Boundary Conduction Mode),邊界或邊界線導(dǎo)通模式:控制器監(jiān)控電感電流,一旦檢測(cè)到電流等于0,功率開關(guān)立即閉合。控制器總是等電感電流“復(fù)位”來激活開關(guān)。如果電感值電流高,而截至斜坡相當(dāng)平,則開關(guān)周期延長(zhǎng),因此,BCM變化器是可變頻率系統(tǒng)。BCM變換器可以稱為臨界導(dǎo)通模式或CRM(Critical Conduction Mode)。
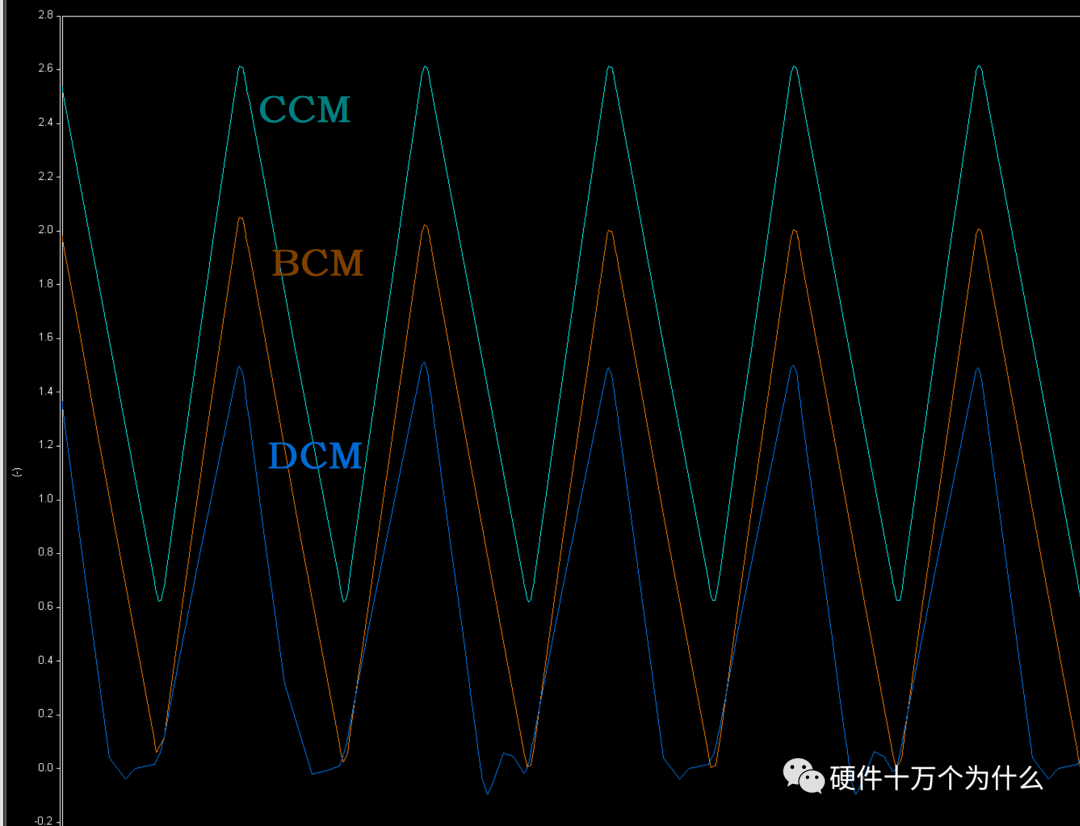
三個(gè)波形在一起對(duì)比:
三、三種工作模式的特點(diǎn):
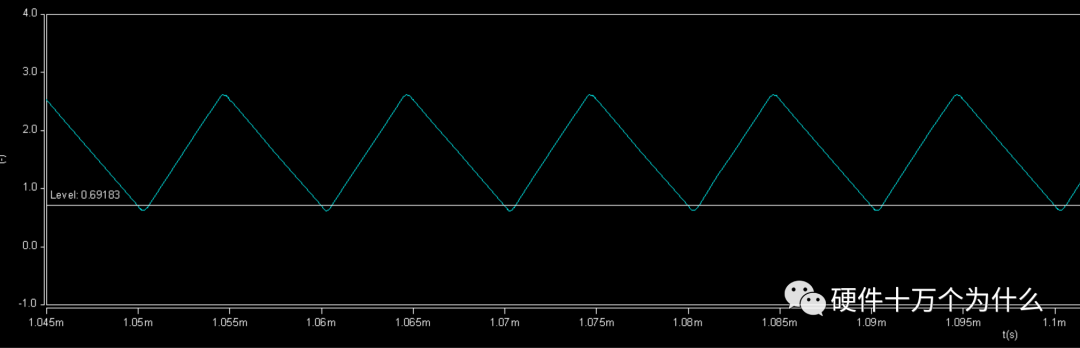
CCM模式(非同步BUCK為例)
為了說明問題,我們只在方正電路上修改了負(fù)載為2歐姆,增加I,使其更大,這樣電感電流是基于I進(jìn)行變化的,紋波電流與0A距離更遠(yuǎn)。
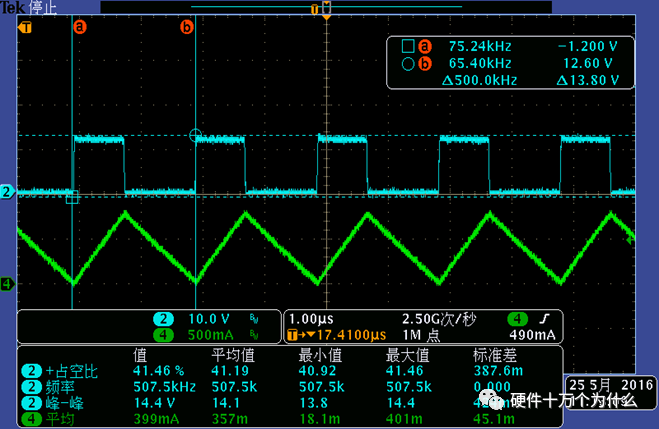
實(shí)測(cè)波形為:
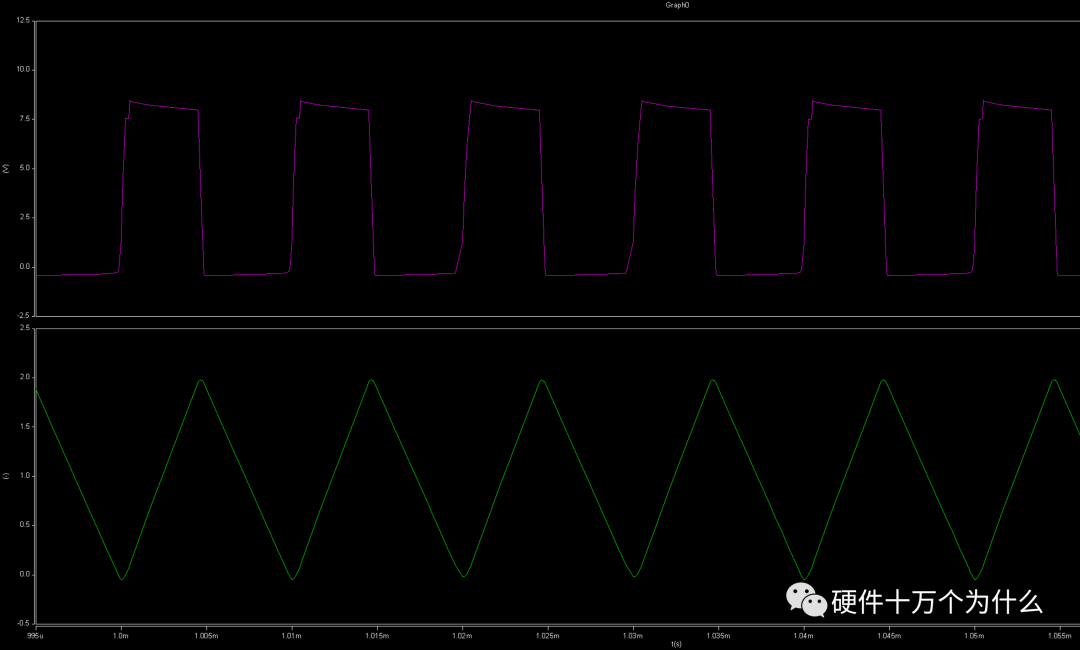
仿真波形:
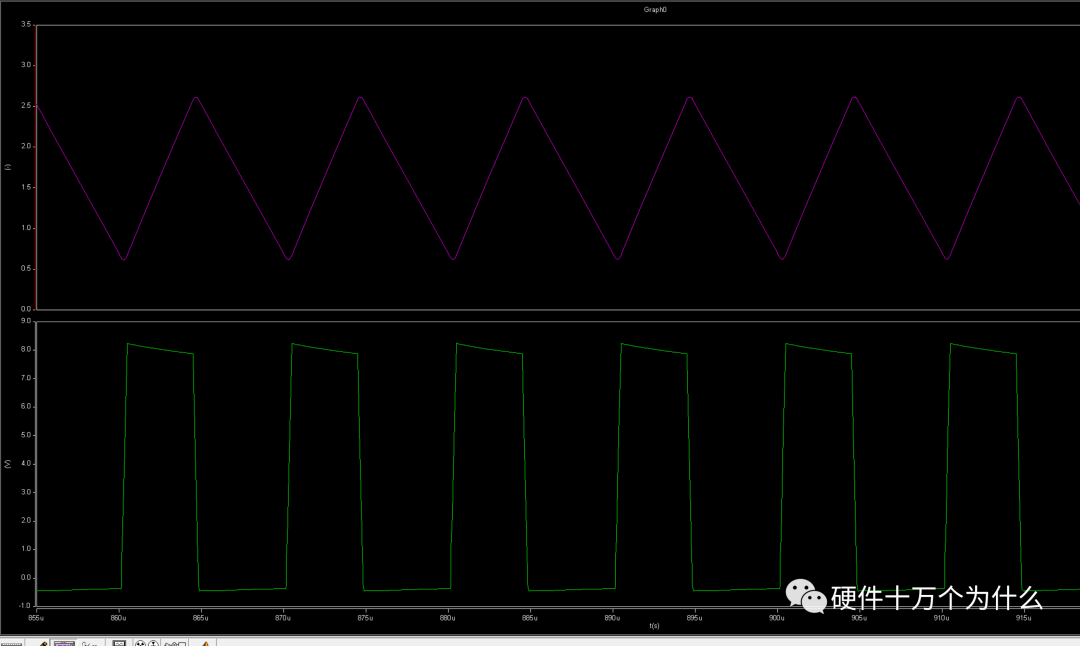
紫色:IL電感電流
綠色:Vsw公共開關(guān)點(diǎn)電壓
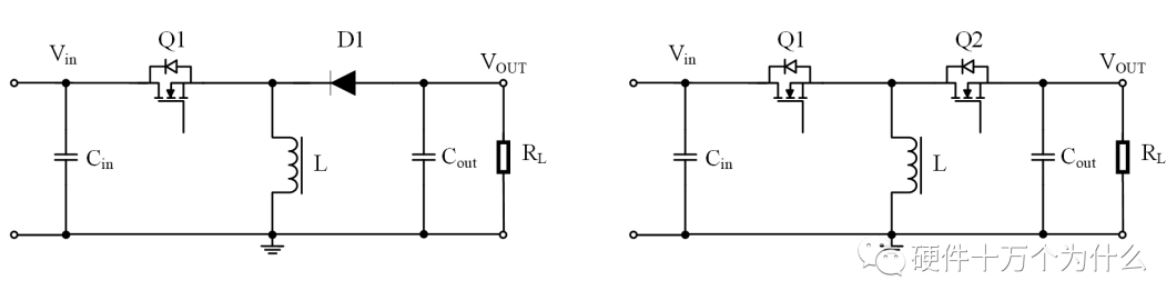
非同步控制器的降壓變換器Buck工作于CCM,會(huì)帶來附加損耗。因?yàn)槔m(xù)流二極管反向恢復(fù)電荷需要時(shí)間來消耗,這對(duì)于功率開關(guān)管而言,是附加的損耗負(fù)擔(dān);
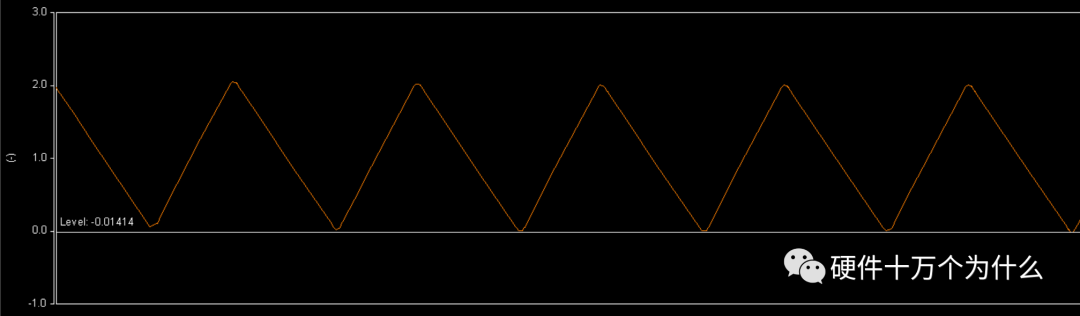
BCM是一種特殊的CCM,它的電感的電流最小值為0
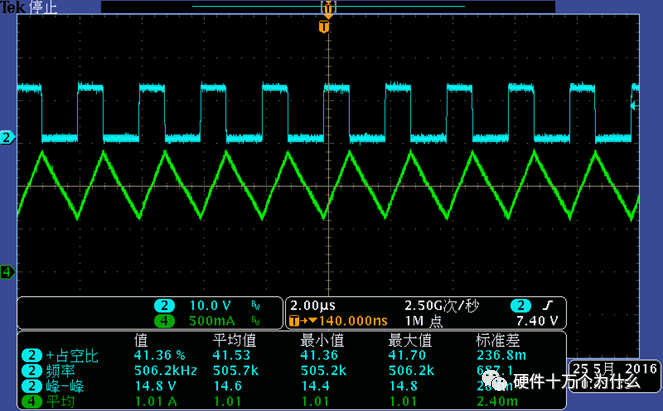
此時(shí)我們把負(fù)載調(diào)為3.6Ω,這樣讓紋波電流壓著0A,形成一個(gè)臨界的狀態(tài)。
實(shí)測(cè)波形:
仿真波形:
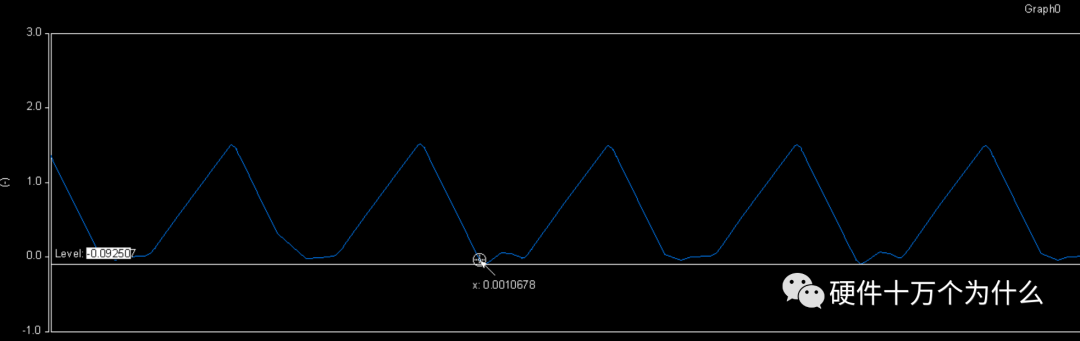
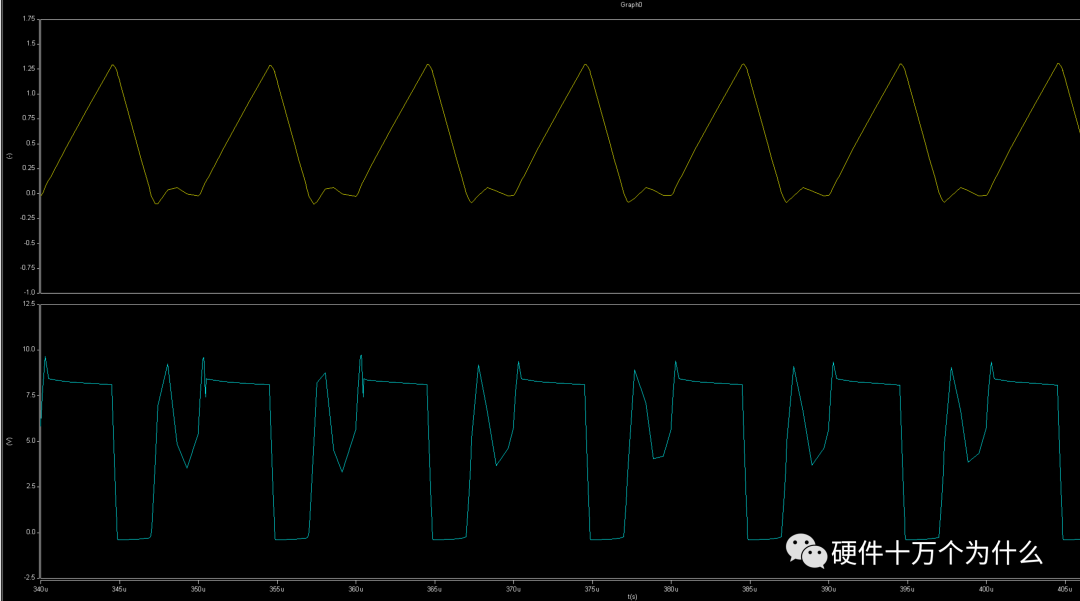
DCM模式(非同步BUCK為例)
我們把負(fù)載調(diào)小,也就是IL電源的輸出電流變小了。相當(dāng)于上面的紋波電流繼續(xù)往下移動(dòng),穿過0A的坐標(biāo)線。我們知道由于二極管的正向?qū)ㄐ裕瞎荜P(guān)閉。所以電感上的電流不會(huì)出現(xiàn)負(fù)數(shù)(我們?cè)O(shè)定輸出方向?yàn)檎较颍4藭r(shí)就會(huì)出現(xiàn)電感上電流為0。
實(shí)測(cè)波形
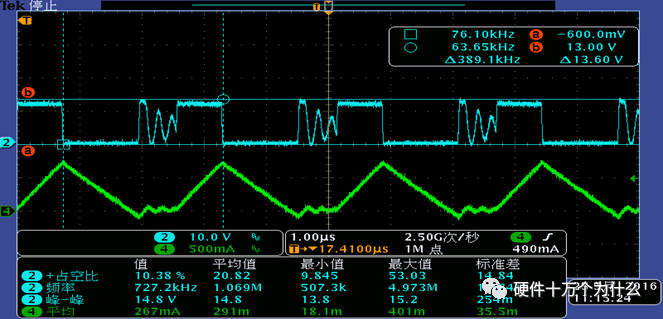
仿真圖中,黃色為電感電流,藍(lán)色為Vsw電壓
四、CCM與DCM比較:
1、DCM能降低功耗的,DCM模式的轉(zhuǎn)換效率更高些;
2、工作于DCM模式,在電感電流為0的時(shí)候,會(huì)產(chǎn)生振蕩現(xiàn)象;
3、工作于CCM模式,輸出電壓與負(fù)載電流無關(guān),當(dāng)工作于DCM模式,輸出電壓受負(fù)載影響,為了控制電壓恒定,占空比必須隨著負(fù)載電流的變化而變化。
-
DCM
+關(guān)注
關(guān)注
0文章
165瀏覽量
26912 -
CCM
+關(guān)注
關(guān)注
0文章
159瀏覽量
24532 -
buck電路
+關(guān)注
關(guān)注
28文章
487瀏覽量
47245 -
電感電流
+關(guān)注
關(guān)注
0文章
88瀏覽量
11245
發(fā)布評(píng)論請(qǐng)先 登錄
細(xì)說Buck之CCM、DCM、BCM
什么是CCM和DCM
請(qǐng)問什么輸出電流范圍下得buck電路適合在DCM下工作?
CCM BUCK和DCM BUCK電路

開關(guān)電源Buck電路CCM及DCM工作模式

開關(guān)電源Buck電路CCM與DCM工作模式有什么區(qū)別?
開關(guān)電源Buck電路CCM和DCM工作模式
BUCK電路的CCM和DCM模式






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論