") 如何實(shí)現(xiàn)單車智能與V2X融合協(xié)同控制功能研究與驗(yàn)證?
如何實(shí)現(xiàn)單車智能與V2X融合協(xié)同控制功能研究與驗(yàn)證?
編者寄語(yǔ):
“單車智能+車路協(xié)同”已被視為未來(lái)自動(dòng)駕駛和智慧交通發(fā)展的重要技術(shù)路徑,進(jìn)行融合協(xié)同控制功能仿真驗(yàn)證對(duì)于產(chǎn)業(yè)發(fā)展和加速落地具有重要意義。 本文將帶來(lái)單車智能與V2X融合仿真系統(tǒng)的概括與介紹。
01車路協(xié)同技術(shù)發(fā)展情況概述
目前,V2X技術(shù)發(fā)展已經(jīng)取得了顯著進(jìn)步,其應(yīng)用可分為近期和中遠(yuǎn)期兩大階段。 近期通過(guò)車車協(xié)同、車路協(xié)同實(shí)現(xiàn)輔助駕駛,提高駕駛安全,提升交通效率; 以及特定場(chǎng)景的中低速無(wú)人駕駛,提高生產(chǎn)效率,降低成本。 中長(zhǎng)期將結(jié)合人工智能、大數(shù)據(jù)等新技術(shù),融合雷達(dá)、視頻感知等技術(shù),通過(guò)車聯(lián)網(wǎng)實(shí)現(xiàn)從單車智能到網(wǎng)聯(lián)智能,最終實(shí)現(xiàn)完全自動(dòng)駕駛。
“單車智能+車路協(xié)同”已被視為未來(lái)自動(dòng)駕駛和智慧交通發(fā)展的重要技術(shù)路徑,5G-V2X是其實(shí)現(xiàn)的重要基礎(chǔ)。 《中國(guó)新車評(píng)價(jià)規(guī)程(C-NCAP)路線圖(2022-2028年)》中明確應(yīng)用C-V2X車聯(lián)技術(shù)實(shí)現(xiàn)主動(dòng)安全場(chǎng)景,比如引入基于C-V2X通信技術(shù)的安全預(yù)警場(chǎng)景,豐富自動(dòng)緊急制動(dòng)的測(cè)試場(chǎng)景。
C-V2X提供的通信和聯(lián)網(wǎng)能力,將助力智能汽車在未來(lái)實(shí)現(xiàn)自動(dòng)駕駛所需的協(xié)同感知、決策和執(zhí)行控制功能。 “單車智能+車路協(xié)同”自動(dòng)駕駛成為未來(lái)的發(fā)展趨勢(shì),但目前關(guān)于單車智能和V2X技術(shù)融合后的新應(yīng)用功能探索研究比較少并且缺乏研究、驗(yàn)證環(huán)境及相關(guān)探索工具。 雖然已有國(guó)內(nèi)建成的車聯(lián)網(wǎng)先導(dǎo)區(qū)可以開展融合協(xié)同控制功能驗(yàn)證,但融功能研究探索實(shí)施起來(lái)還不是很便捷,場(chǎng)景復(fù)現(xiàn)性差,測(cè)試成本高。
單車智能與V2X融合協(xié)同控制功能研究與驗(yàn)證系統(tǒng)能發(fā)揮出巨大優(yōu)勢(shì),可以作為融合功能研究探索工具。 其中行業(yè)對(duì)于融合功能的維度可以分為兩個(gè)層次:
01弱融合
單純?cè)黾覸2X技術(shù),OBU單獨(dú)發(fā)出預(yù)警,比如路口鬼探頭場(chǎng)景。 典型的標(biāo)準(zhǔn)場(chǎng)景均可應(yīng)用。 將單車智能車輛直接加上V2X技術(shù)。 方便直接量產(chǎn)應(yīng)用。
02強(qiáng)融合
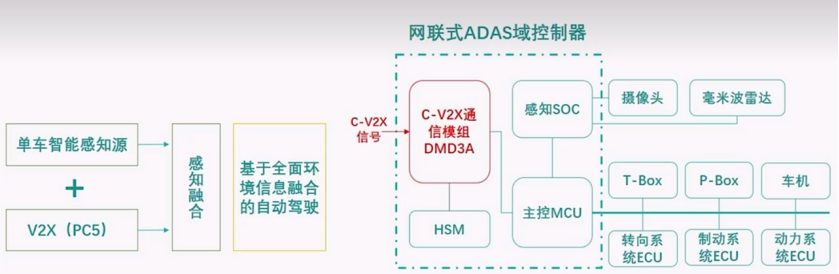
OBU獲得的信息和ADAS 傳感器或者自動(dòng)駕駛控制器獲得的單車智能傳感器信息進(jìn)行融合,控制器根據(jù)二者信息綜合決策發(fā)出下一步指令,深度融合后的新應(yīng)用功能可能和ADAS功能或者自動(dòng)駕駛功能響應(yīng)一致,也可不一致。 包含CADAS和 CAD。 比如C-NCAP中主動(dòng)安全場(chǎng)景:速度預(yù)警場(chǎng)景、速度輔助系統(tǒng)(C-SAS)、AEB鬼探頭場(chǎng)景,C-AEB、盲區(qū)監(jiān)測(cè)系統(tǒng)C-BSD等。
目前市面上已有一些C-V2X與單車視覺(jué)、毫米波感知進(jìn)行融合的域控制器產(chǎn)品,支持C-V2X直連通信,可實(shí)現(xiàn)車車(V2V)、車路(V2I)協(xié)同,并集成前向視覺(jué)和雷達(dá)處理功能,將V2V、V2I感知結(jié)果直接引入車輛運(yùn)動(dòng)軌跡規(guī)劃、線性控制算法中,在車輛視覺(jué)感知性能下降的特殊場(chǎng)景中,如:橫向車輛切入、十字路口建筑物遮擋、雨霧天氣等, 實(shí)現(xiàn)網(wǎng)聯(lián)式高級(jí)駕駛輔助功能的擴(kuò)展和增強(qiáng)。
02單車智能與V2X融合仿真系統(tǒng)介紹
V2X技術(shù)和自動(dòng)駕駛功能的融合,將為自動(dòng)駕駛車輛提供更多的信息和指導(dǎo),從而更好地處理周圍環(huán)境的變化和威脅,提高自動(dòng)駕駛的安全性。 中汽智聯(lián)基于在智能駕駛及V2X仿真領(lǐng)域的積累,面對(duì)行業(yè)前沿需求,開發(fā)了單車智能與V2X融合協(xié)同控制功能研究與驗(yàn)證系統(tǒng),為單車智能和V2X技術(shù)融合后的新應(yīng)用功能探索提供研究環(huán)境和工具。
總體來(lái)講,單車智能與V2X融合控制功能仿真驗(yàn)證系統(tǒng)分為硬件在環(huán)HIL和實(shí)車在環(huán)VIL兩類。 具體包括場(chǎng)景仿真軟件、車輛動(dòng)力學(xué)軟件、測(cè)試管理軟件、實(shí)時(shí)機(jī)、V2X測(cè)試軟件、V2X PC5仿真器、衛(wèi)星信號(hào)模擬器、主車OBU、被測(cè)融合功能控制器、上位機(jī)、工控機(jī)等。 系統(tǒng)架構(gòu)流程圖如下所示。
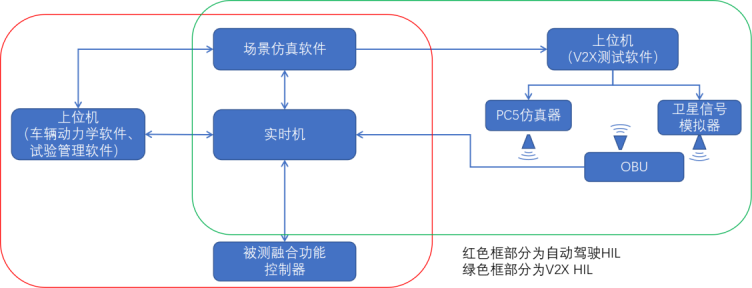
V2X融合功能仿真驗(yàn)證臺(tái)架是一種融合了自動(dòng)駕駛HIL系統(tǒng)和V2X HIL 系統(tǒng)的臺(tái)架,主要用于滿足融合功能驗(yàn)證與測(cè)試的需求。自動(dòng)駕駛HIL系統(tǒng)是一個(gè)虛擬測(cè)試環(huán)境,利用場(chǎng)景仿真軟件可以為兩個(gè)系統(tǒng)提供虛擬交通場(chǎng)景,而V2X HIL系統(tǒng)則需要V2X測(cè)試軟件來(lái)提取交通場(chǎng)景信息并按照協(xié)議打包,發(fā)送給V2X信號(hào)模擬器和衛(wèi)星信號(hào)模擬器,OBU將接收到信號(hào)通過(guò)CAN或者以太網(wǎng)接口發(fā)回實(shí)時(shí)機(jī)并傳送給被測(cè)融合功能控制器。
在自動(dòng)駕駛HIL系統(tǒng)中,動(dòng)力學(xué)模型軟件為被控車輛提供車輛動(dòng)力學(xué)模型,并部署到實(shí)時(shí)機(jī)上,而測(cè)試管理軟件則可以實(shí)現(xiàn)將虛擬場(chǎng)景中主車信息、車載視角傳感器探測(cè)到的其他交通參與者信息發(fā)送給融合功能控制器。
以單攝像頭融合為例,V2X融合功能仿真驗(yàn)證系統(tǒng)還需要配置攝像頭傳感器模型,攝像頭模型的輸出數(shù)據(jù)由場(chǎng)景仿真軟件輸出到實(shí)時(shí)機(jī)上,并通過(guò)視頻數(shù)據(jù)處理板卡輸出GSML接口的數(shù)據(jù)一起發(fā)送給融合控制器,同時(shí)V2X鏈路OBU將收到的信息發(fā)送給融合功能控制器,實(shí)現(xiàn)一路攝像頭數(shù)據(jù)與OBU信息的融合。
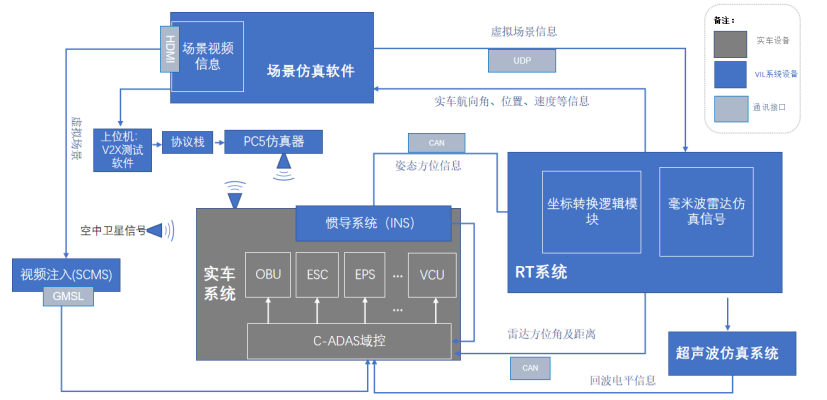
融合功能控制器通過(guò)自身車輛狀態(tài)信息和接收的單車智能傳感器信息和OBU信息進(jìn)行決策并發(fā)出控制指令給到動(dòng)力學(xué)模型,輸出的結(jié)果反饋至場(chǎng)景軟件進(jìn)行顯示。
在此系統(tǒng)中,通過(guò)將場(chǎng)景仿真軟件中的場(chǎng)景時(shí)間戳加在被發(fā)送信號(hào)中的方式,來(lái)保證驗(yàn)證過(guò)程中的兩條鏈路的同步性。其中一路信號(hào)將主車位置信息、單車智能傳感器探測(cè)的信息發(fā)送給融合功能控制器;另一路信號(hào)通過(guò)V2X測(cè)試軟件提取并發(fā)送給PC5仿真器、衛(wèi)星信號(hào)模擬器,OBU將接收的信號(hào)在傳送至被測(cè)融合控制器。
以單攝像頭融合V2X信號(hào)的C-ADAS控制器為例,開展了“單車智能與V2X融合控制功能仿真驗(yàn)證系統(tǒng)VIL級(jí)驗(yàn)證嘗試。
通過(guò)該系統(tǒng)可以開展單車智能與V2X融合協(xié)同控制功能研究,對(duì)融合場(chǎng)景下對(duì)應(yīng)的功能進(jìn)行探索驗(yàn)證,并梳理出來(lái)相應(yīng)的功能定義,支持后續(xù)融合功能算法技術(shù)落地。同時(shí)也可以通過(guò)該系統(tǒng)進(jìn)行融合協(xié)同控制功能驗(yàn)證。
03單車智能與V2X融合仿真意義總結(jié)
V2X與自動(dòng)駕駛?cè)诤瞎δ芊抡鏈y(cè)試,將有效驗(yàn)證V2X技術(shù)在自動(dòng)駕駛車輛中的安全性,有助于更好地控制自動(dòng)駕駛車輛的行為,降低交通事故的發(fā)生率,從而實(shí)現(xiàn)安全可靠的自動(dòng)駕駛。
V2X與自動(dòng)駕駛?cè)诤瞎δ芊抡鏈y(cè)試系統(tǒng)具有巨大的市場(chǎng)潛力,為單車智能和V2X技術(shù)融合后的新應(yīng)用功能探索提供研究環(huán)境和工具,可以有效改善自動(dòng)駕駛車輛的安全性和可靠性,使車輛在復(fù)雜的道路環(huán)境中行駛得更安全。
審核編輯:湯梓紅
-
仿真系統(tǒng)
+關(guān)注
關(guān)注
1文章
104瀏覽量
21105 -
5G
+關(guān)注
關(guān)注
1360文章
48743瀏覽量
570577 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14222瀏覽量
169653 -
V2X
+關(guān)注
關(guān)注
25文章
216瀏覽量
44081 -
車路協(xié)同
+關(guān)注
關(guān)注
1文章
60瀏覽量
4119
原文標(biāo)題:技術(shù)科普丨如何實(shí)現(xiàn)單車智能與V2X融合協(xié)同控制功能研究與驗(yàn)證?
文章出處:【微信號(hào):智能汽車電子與軟件,微信公眾號(hào):智能汽車電子與軟件】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
V2X標(biāo)注之爭(zhēng) 中國(guó)V2X通信標(biāo)準(zhǔn)亟待確立

如何將V2X技術(shù)應(yīng)用到汽車中?# 車聯(lián)網(wǎng) # V2X # C-V2X
在了解車聯(lián)網(wǎng)之前,你知道V2X是什么嗎?
基于飛凌i.MX8MQ核心板實(shí)現(xiàn)V2X方案
5分鐘成為車聯(lián)網(wǎng)專家|如何實(shí)現(xiàn)C-V2X技術(shù)突破把住車聯(lián)網(wǎng)發(fā)展命門 精選資料分享
車路協(xié)同實(shí)現(xiàn)無(wú)人駕駛是國(guó)內(nèi)主流,但離不開單車智能
別克V2X:要真正發(fā)揮V2X應(yīng)用的功能,僅著眼于車端不夠
V2X HIL測(cè)試的詳細(xì)介紹
在自動(dòng)駕駛汽車中實(shí)現(xiàn)5G和DSRC V2X
V2X測(cè)試解決方案

V2X技術(shù)與智能傳感器的完美融合:提升城市道路安全
基于V2X和自動(dòng)駕駛HIL聯(lián)調(diào)的仿真測(cè)試系統(tǒng)開發(fā)

V2X車路協(xié)同系統(tǒng)

V2X車路協(xié)同系統(tǒng)

V2X車路協(xié)同系統(tǒng)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論