 亞馬遜告訴機器人如何堆裝貨物
亞馬遜告訴機器人如何堆裝貨物
將物品裝入倉庫的移動貨架是一個非常困難的問題。
倉庫中的操作機器人大多數都用于從箱子里取出物品。這種揀貨操作可能很困難,特別是不同類型物品的數量達到數百萬時。但機器人越來越擅長這種工作。此外,它們也開始擅長將物品放入箱子的堆裝操作。
一個月前,亞馬遜推出了Spa-rrow,并稱其為“倉庫中第一個能夠從庫存中識別、挑選和處理單個產品的機器人系統”。然而,周邊系統是通過為Sparrow提供非常適合機器人搬運的箱子來完成大部分繁重工作的。在各地高度自動化的倉庫中,大多數箱子要么只裝相同的物品,要么只裝少量不同物品。
但是,對于亞馬遜倉庫中的絕大多數物品,采用機器人友好的箱子并不現實,主要原因是人堆放物品的方式通常靠直覺完成,這會讓機器人感到很困惑。華盛頓大學保羅?G. 艾倫計算機科學與工程學院教授西達爾塔?斯里尼瓦薩(Siddartha Srinivasa)在2022年底以前,一直擔任亞馬遜機器人人工智能總監,他將堆裝物品的問題描述為“一場噩夢……堆裝從根本上打破了所有現有工業機器人思維”。但過去幾年里,為了解決這一問題,亞馬遜機器人公司的研究人員做了一些認真的工作,重點研究了大多數亞馬遜倉庫的實際運行方式:通過人來完成大多數復雜操作。
在標準的倉庫中,亞馬遜的轉送裝置(頂部有貨架的移動機器人,稱為“吊艙”)從人們身邊駛過,就像服務員為顧客端上美味佳肴一樣。人們在貨架中挑選物品、創建訂單。因此,揀貨的任務是由機器人和人共同完成的。但人讓物品進入亞馬遜倉庫的工作流程是一開始就把物品放在這些移動貨架上。事實證明,這種方式能夠最有效地利用空間。這很有道理。
亞馬遜倉庫在收到一批新貨庫存時,顯然要做的事可能就是召喚一個移動機器人,用它充足的貨架堆裝所有物品。這樣,有人訂購一件物品時,剛剛裝貨的移動機器人就會出現,人們可以從貨架上取出相應物品。然而,如果移動機器人被卡住、破損,或者無法使用,那么人們就無法得到需要的物品,這會降低整個系統的速度。亞馬遜的策略是將貨物分配給多個移動機器人,始終保持部分可用。
這種分布式堆裝的過程是隨機的,在這個過程中,堆裝員可能會將一些物品裝入出現的任何移動機器人中。堆裝員決定堆裝物品最適合的位置,包括已裝有其他隨機物品的箱子,亞馬遜其實并不在乎具體怎么裝,只要庫存系統能夠追蹤物品的去向即可。
評估該系統的觀察人員很快注意到了兩個問題:首先,亞馬遜產品的堆裝方式與傳統的揀貨機器人完全不兼容。其次,我們很容易理解為什么堆裝對機器人是一場噩夢。機器人不僅必須小心翼翼地擺布雜亂的物品,在箱子中騰出空間,還必須處理松緊帶,維持物品不從箱子中掉落,物品還必須擺放妥當,不能遮擋視線或妨礙操作。
“對我來說,這很難,但也不是太難,這是機器人可行操作的最前沿。”亞馬遜機器人人工智能的應用科學高級經理亞倫?帕內斯(Aaron Parness)說,“這是一件非常有趣的工作。”
帕內斯加入亞馬遜之前在斯坦福大學和噴氣推進實驗室研究了StickyBot和LEMUR等機器人,負責設計在微重力條件下抓取小行星的微脊椎抓取器。“擁有能夠在高度雜亂和高接觸環境中進行交互的機器人是非常激動人心的,我認為這會開啟一波全新的應用。”他補充道。
亞馬遜的堆裝任務針對堆裝人員進行了高度優化,這對機器人來說既是前沿,又是噩夢。這意味著,實現對以人為中心的工作流程產生重大影響的機器人解決方案不會很遠。因此,帕內斯和高級應用科學家帕克?奧萬(Parker Owan)必須一起開發能夠解決該問題的硬件和軟件。
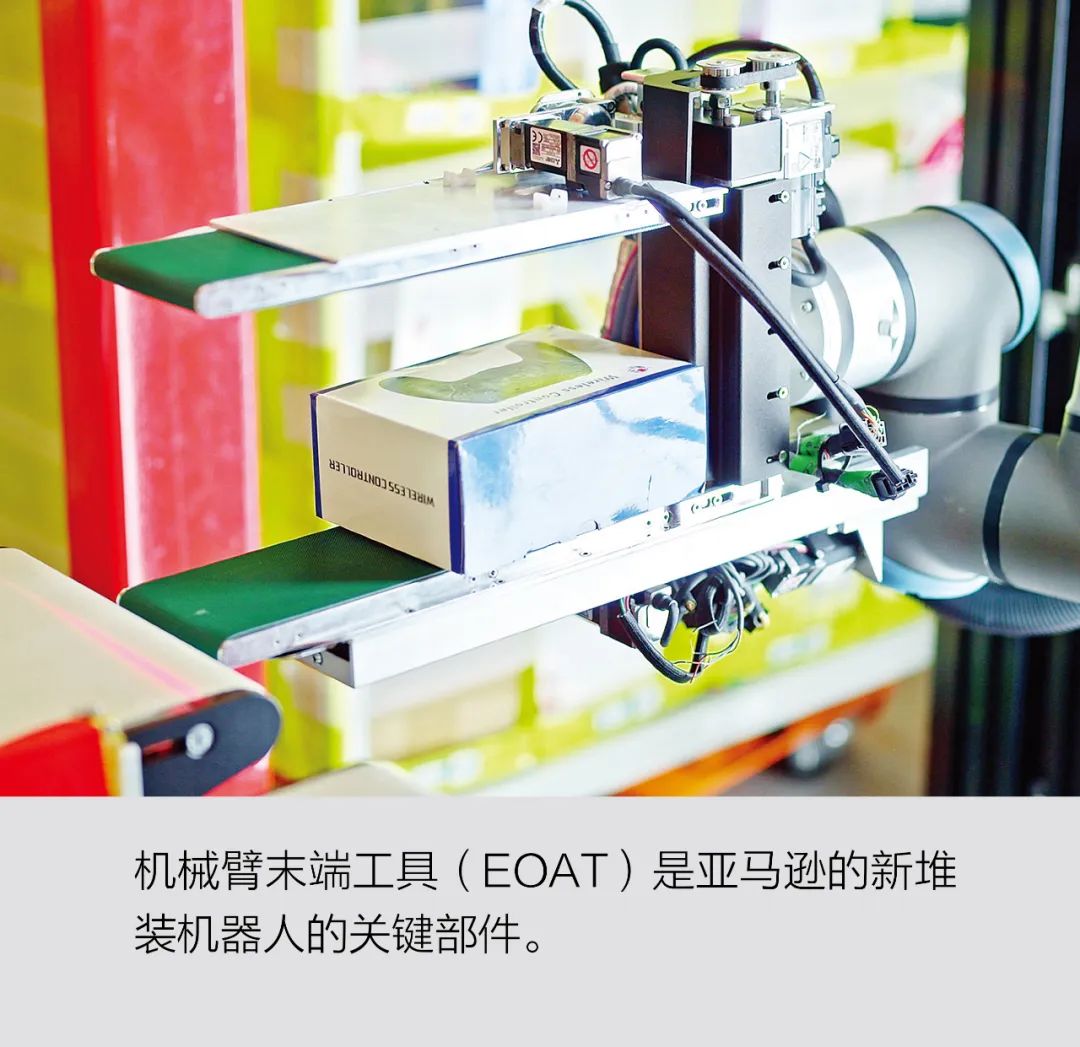
他們的想法是這樣的:在硬件方面,設計一個掛鉤系統來將松緊帶扯出,以便使貨物進入箱子。這是容易的部分,困難的部分體現在機械臂末端工具(EOAT)上。機械臂末端工具有兩個長的傳送板,能輕輕擠壓拾取物品;內表面有傳送帶,能將物品送入箱子。在傳送板之前,可延伸的薄金屬鏟進入箱子,必要時能移動物品,騰出空間。

要使用所有硬件,需要一些非常復雜的軟件,因為系統要能感知箱子里的物品(有些帶有松緊帶的物品可能會阻擋看到其他物品的視線)、判斷每個物品的特征、根據要堆裝的對象制定一個計劃、安全移動這些物品,并使箱內可用空間最大化,然后執行操作,實現全部計劃。通過在實驗室內分解這一過程,亞馬遜研究人員已經能夠實現堆裝成功率超過90%。
現在,原型機正在華盛頓州的一個亞馬遜運營中心堆裝實際庫存物品。其目標是堆裝亞馬遜數百萬件物品庫存中的85%。85%的比例已經足夠好,因為該系統將安裝在公司員工所用的同一操作流程中。該系統若無法處理某項任務,就會將其交給人來完成。
至于亞馬遜倉庫問題的另一部分:揀貨,亞馬遜已經開始與學術界進行更多的接觸。“我的團隊贊助了麻省理工大學和華盛頓大學的研究。”帕內斯說,“華盛頓大學的團隊實際上正在研究揀貨。堆裝和揀貨都是非常困難、非常誘人的問題,我希望能及時解決這兩個問題!”
審核編輯 :李倩
-
機器人
+關注
關注
212文章
29280瀏覽量
210868 -
人工智能
+關注
關注
1804文章
48449瀏覽量
244949 -
亞馬遜
+關注
關注
8文章
2690瀏覽量
84314
原文標題:亞馬遜告訴機器人如何堆裝貨物
文章出處:【微信號:CloudBrain-TT,微信公眾號:云腦智庫】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
名單公布!【書籍評測活動NO.58】ROS 2智能機器人開發實踐
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
【「具身智能機器人系統」閱讀體驗】+初品的體驗
搬運碼垛機器人的特性和運用方式
關于全自動裝車機器人的詳細介紹
開源項目!用ESP32做一個可愛的無用機器人
Al大模型機器人
亞馬遜停止生產企業安全機器人,專注家用機器人
亞馬遜秘密研發AI聊天機器人Metis,挑戰ChatGPT
碼垛工業機器人的基本原理






 工商網監
工商網監
評論