") 永磁同步電機流頻比I/F控制原理及Matlab/Simulink仿真分析
永磁同步電機流頻比I/F控制原理及Matlab/Simulink仿真分析
前言
本章節(jié)采用流頻比I/F控制方法驅(qū)動永磁同步電機的轉動,首先分析流頻比I/F的控制原理,然后在Matlab/Simulink中進行永磁同步電機流頻比I/F控制系統(tǒng)的仿真分析,為后續(xù)PMSM無感啟動做鋪墊。
一、流頻比I/F控制原理
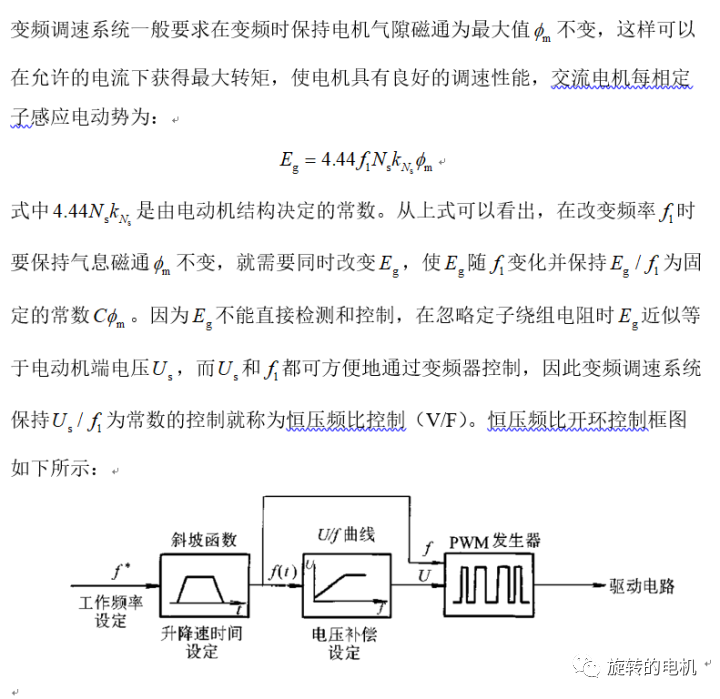
PMSM的恒壓頻比V/F控制是保持電機的電壓和頻率之比固定,即磁通為常數(shù),既不需要轉速閉環(huán)控制,也不需要進行電流采樣,是一種完全的開環(huán)控制方式。V/F控制有兩個明顯的不足:不具備負載轉矩匹配能力,轉速容易產(chǎn)生振蕩;最佳V/F曲線的整定比較困難,容易引起電機過電流。
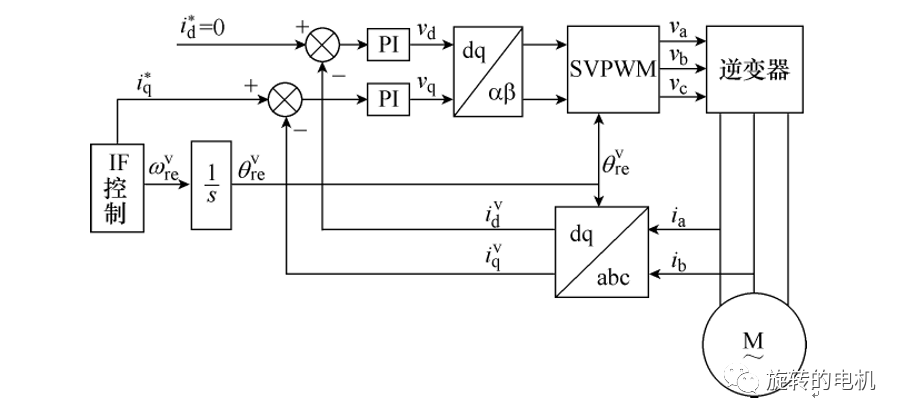
相比于恒壓頻比V/F控制,流頻比I/F控制是一種轉速開環(huán),電流閉環(huán)的控制方式,其無需保持電流幅值和頻率的比值恒定,可依據(jù)負載轉矩選擇合適的電流幅值。I/F控制可以直接控制定子繞組電流幅值,因此這種控制方式不會出現(xiàn)電機過電流現(xiàn)象;通過控制定子繞組電流,使電機具有較好的負載轉矩匹配能力,并且依靠“轉矩-功角自平衡”特性,電機具備較強的抗負載擾動能力。I/F控制框圖如下所示
二、永磁同步電機I/F控制系統(tǒng)Matlab/Simulink仿真分析
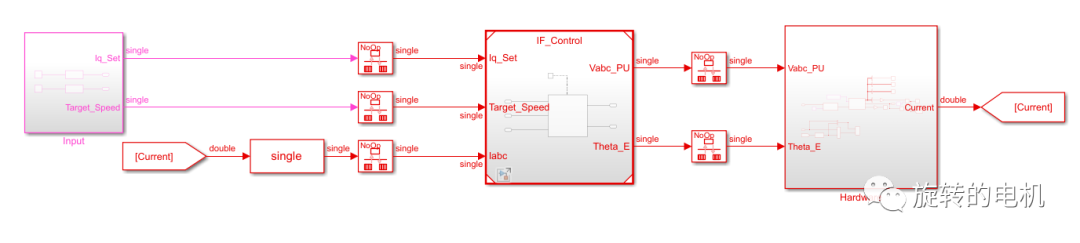
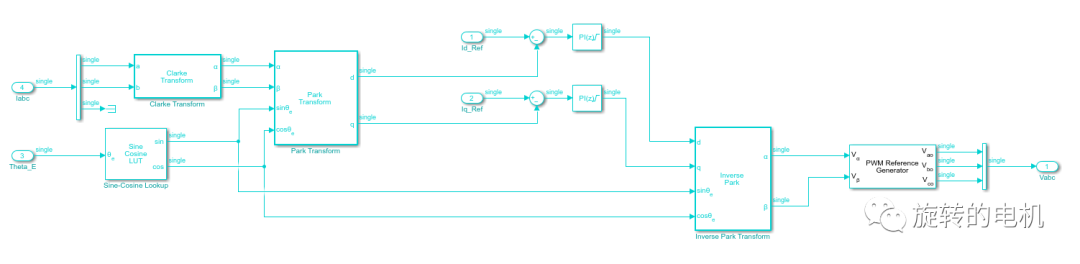
上圖為PMSM流頻比I/F整體控制框圖,為了后續(xù)算法模型生成代碼加載到底層工程進行工程實現(xiàn),本示例將I/F控制算法部分單獨建立模型,通過調(diào)用I/F控制算法模型進行PMSM的流頻比I/F控制。
2.1.仿真電路分析
2.1.1 I/F控制
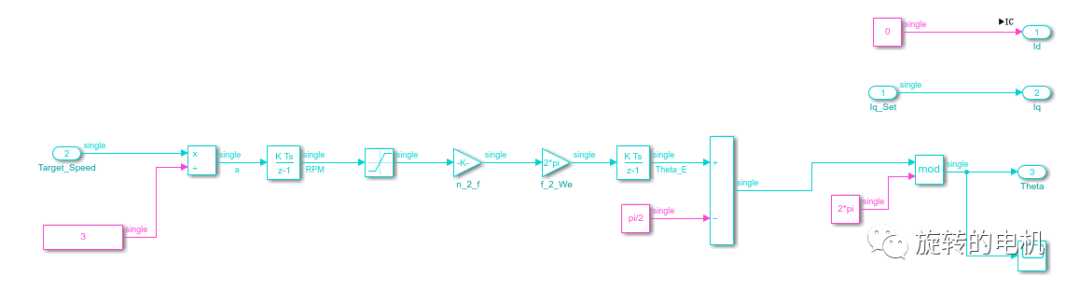
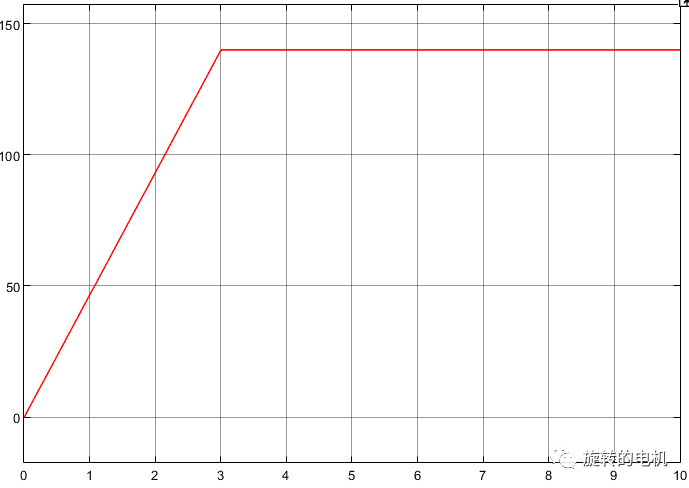
IF控制算法如上圖所示,Id_Ref設置為0,Iq_Set設置為電機額定電流1.2A,位置角通過如下生成:
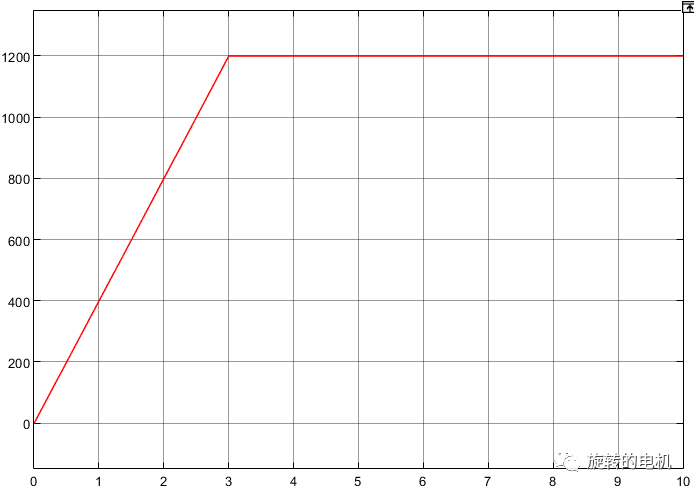
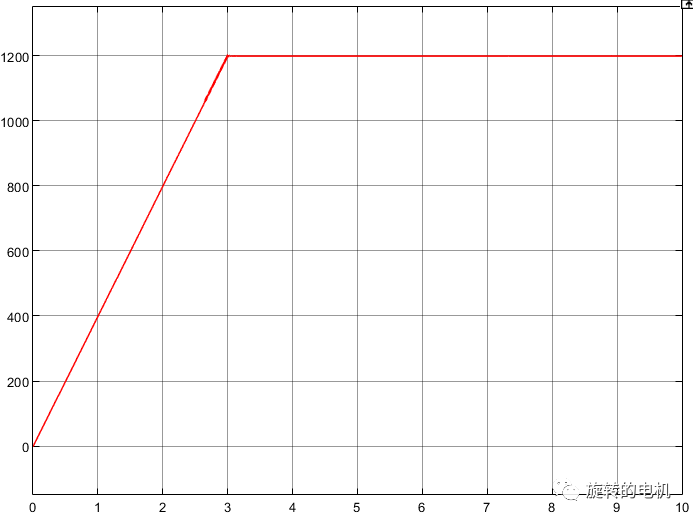
目標速度除以時間得到加速度。此示例加速度設置為1200/3=400,即3s的時間速度由0加速為1200。
對加速度求積分得到速度,再通過下式將速度換算為角頻率。

再通過 we=2pif 將角頻率換算為角速度。
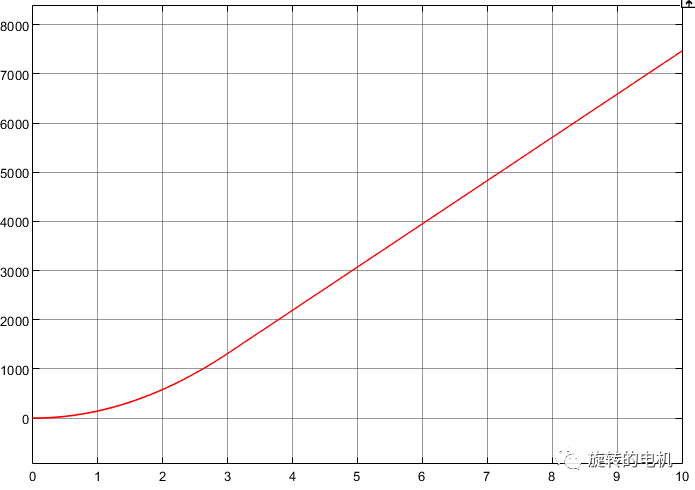
對角速度求積分得到電角度。
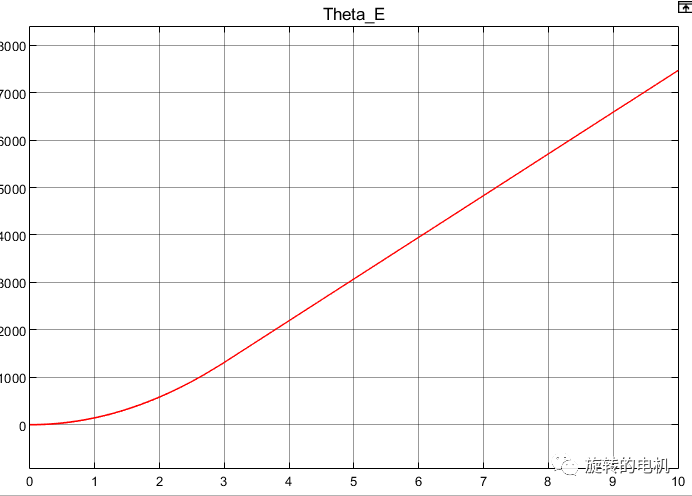
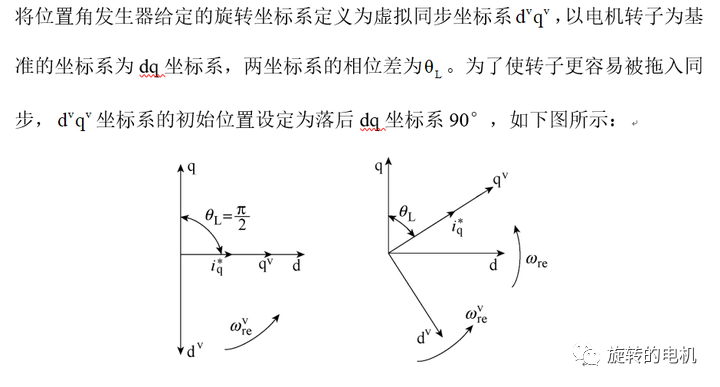
將電角度減去pi/2,使給定的虛擬同步dvqv坐標系初始位置滯后實際的基準dq坐標系90°。
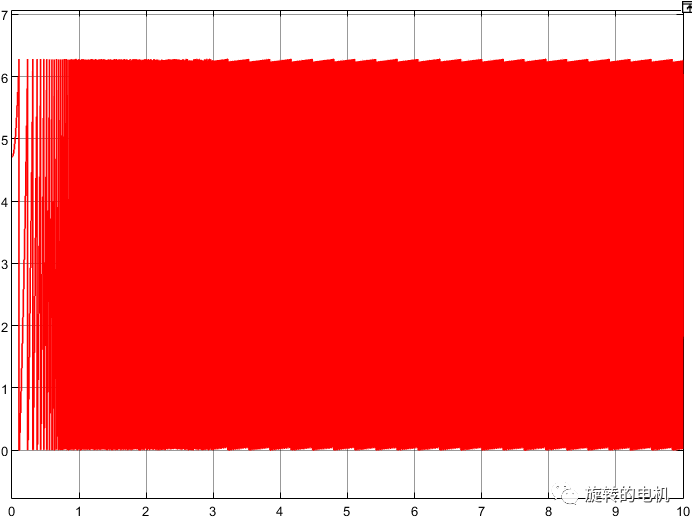
通過mod函數(shù)將電角度換算到0~2*pi之間。
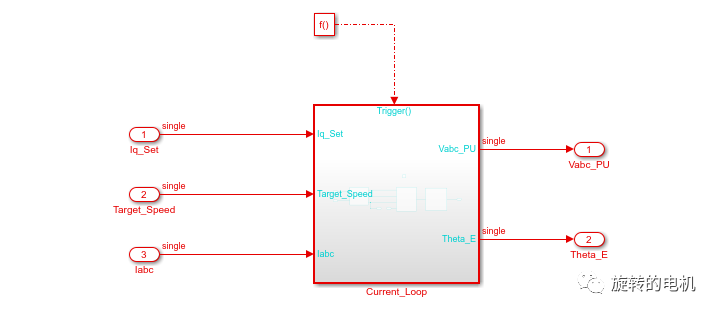
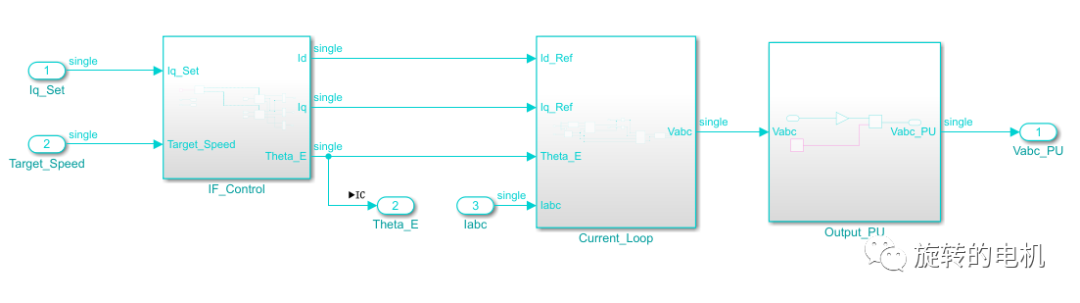
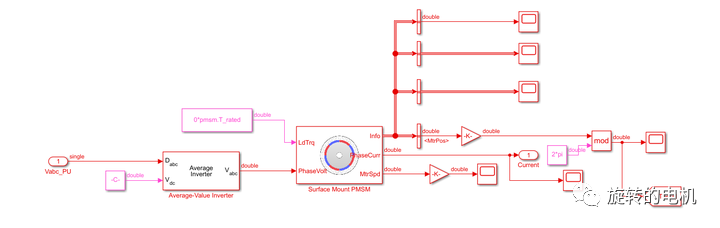
2.1.2 FOC電流環(huán)控制
上圖為PMSM電流閉環(huán)控制。
2.1.3 輸出處理
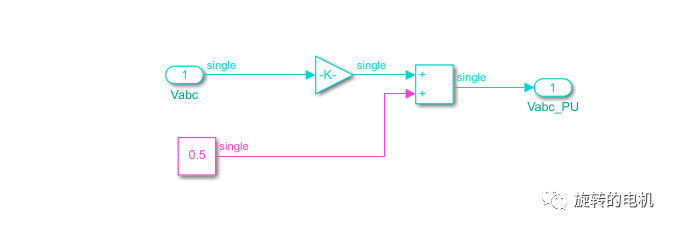
對SVPWM控制算法的輸出波形做歸一化處理,使其落在[0,1]的范圍內(nèi):
2.1.4 主電路
2.2 仿真結果分析
電機轉速:3s后達到設定的目標轉速1200RPM
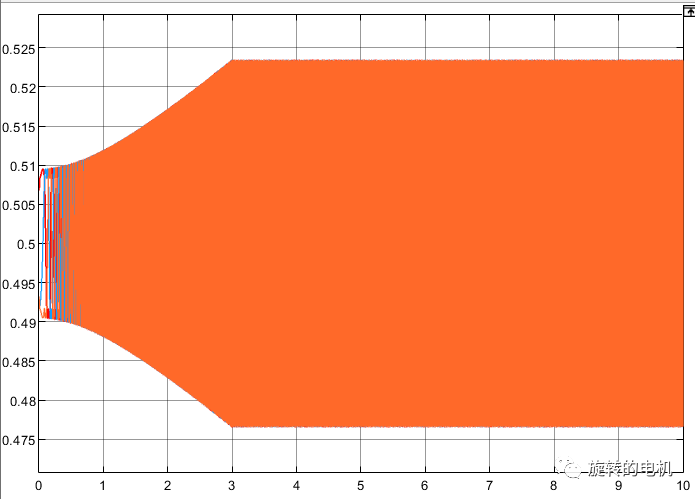
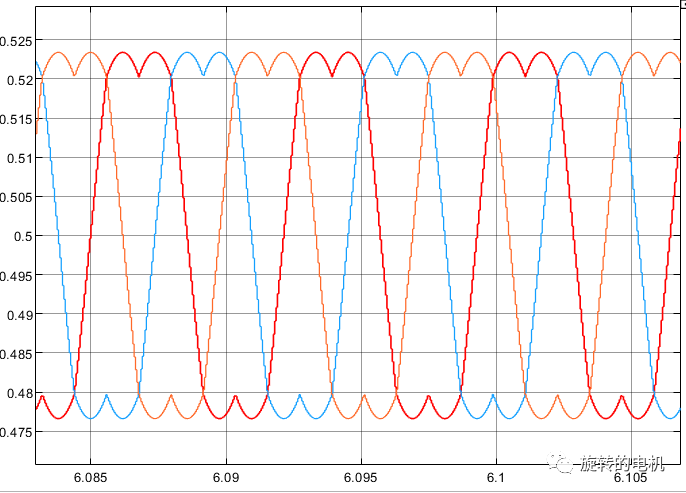
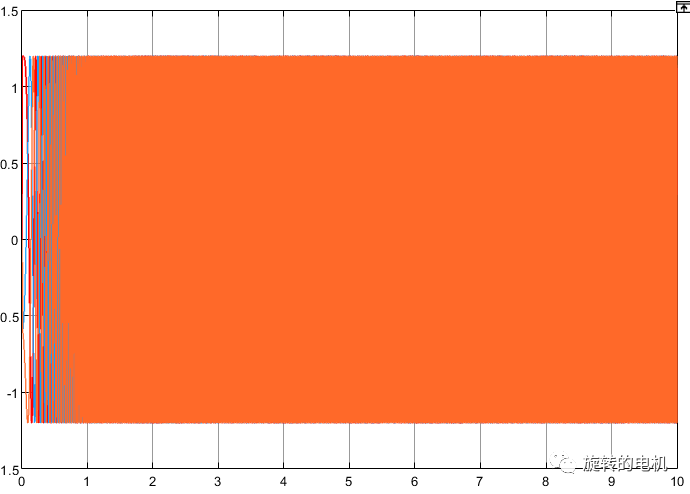
電機定子電流:電流幅值為設定的給定值1.2A
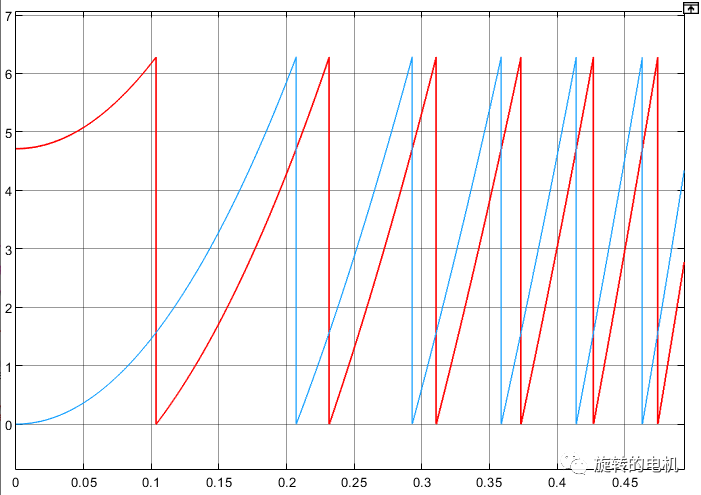
電機轉子位置與給定位置:兩坐標系的初始位置差為90°
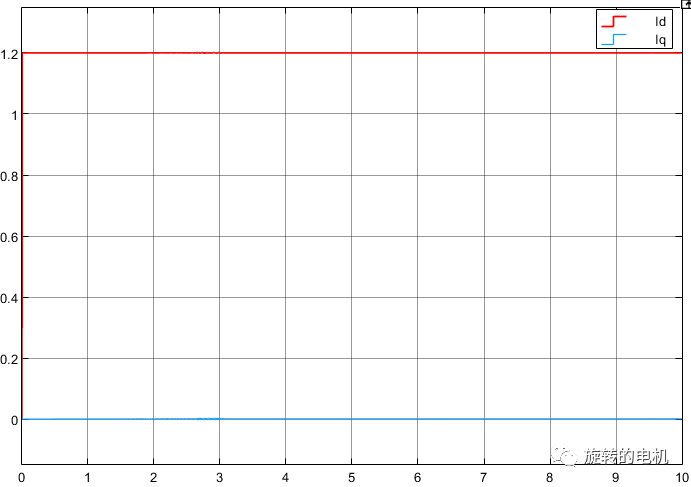
同步旋轉坐標系下的定子電流Id、Iq:
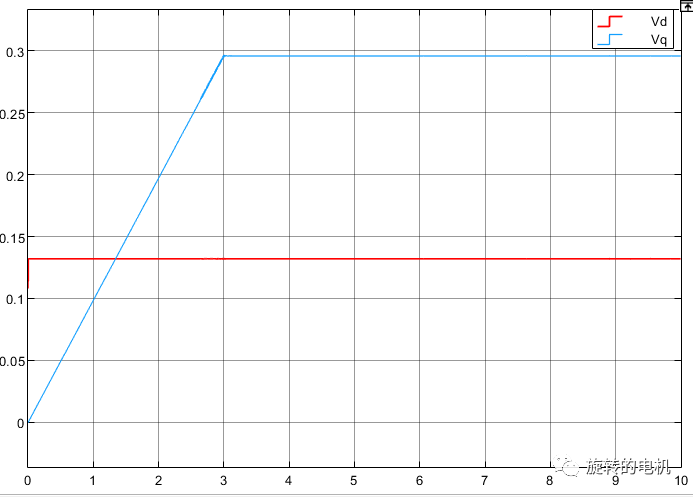
同步旋轉坐標系下的定子電壓:
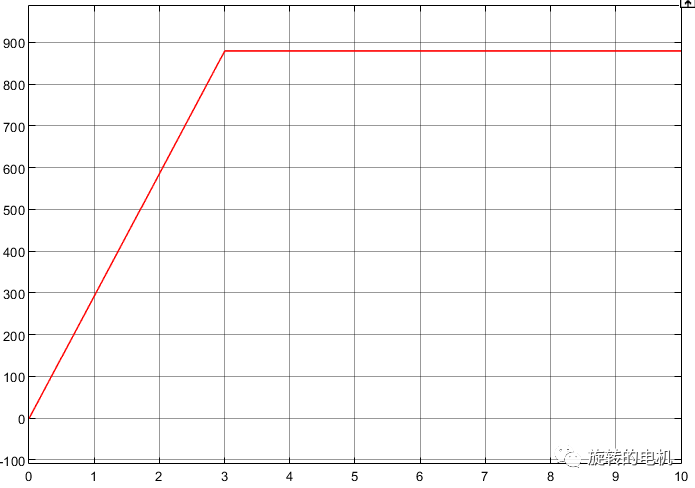
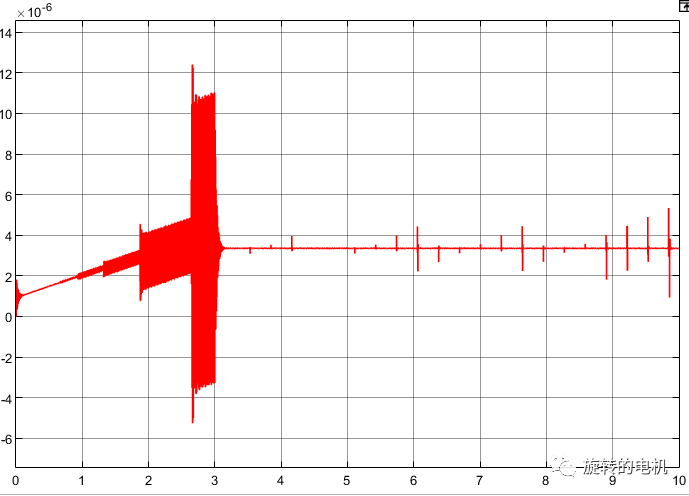
電磁轉矩:
總結
本章節(jié)采用流頻比I/F控制方法驅(qū)動永磁同步電機的轉動,首先分析了流頻比I/F的控制原理,然后在Matlab/Simulink中進行了永磁同步電機流頻比I/F控制系統(tǒng)的仿真分析,為后續(xù)PMSM無感啟動奠定基礎。
-
matlab
+關注
關注
187文章
2990瀏覽量
232777 -
控制系統(tǒng)
+關注
關注
41文章
6740瀏覽量
111604 -
永磁同步電機
+關注
關注
28文章
876瀏覽量
50097 -
Simulink
+關注
關注
22文章
538瀏覽量
63421 -
PMSM
+關注
關注
14文章
248瀏覽量
42371
發(fā)布評論請先 登錄
相關推薦
在Matlab/Simulink中進行永磁同步電機流頻比I/F控制系統(tǒng)的仿真分析

永磁同步電機matlab/simulink建模
【下載】《現(xiàn)代永磁同步電機控制原理及MATLAB仿真》——同步電機MATLAB仿真與技術分析
Simulink永磁同步電機控制仿真系列
永磁同步電機控制原理及MATLAB仿真
基于Matlab/Simulink的永磁同步電機(PMSM)
現(xiàn)代永磁同步電機控制原理及MATLAB仿真
基于Matlab-Simulink的永磁同步電機(PMSM)矢量控制仿真
現(xiàn)代永磁同步電機控制原理及MATLAB仿真源碼/模型

永磁同步電機恒壓頻比開環(huán)控制系統(tǒng)Matlab/Simulink仿真分析(一)
永磁同步電機FOC控制的基本原理及Matlab/Simulink仿真分析





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論