") 誰在重塑工業(yè)機(jī)器人的未來?
誰在重塑工業(yè)機(jī)器人的未來?
圖源:jcomp/freepik.com
機(jī)
器
人
無論是在外科手術(shù)還是在制造車間,機(jī)器人都越來越多地成為日常生活和工業(yè)領(lǐng)域的一部分。根據(jù)機(jī)器人行業(yè)的統(tǒng)計數(shù)據(jù),現(xiàn)在88%的企業(yè)計劃在其組織中投資增加機(jī)器人技術(shù),全球約有300萬個工業(yè)機(jī)器人在使用中,另外,每年將有近40萬個新機(jī)器人進(jìn)入市場。
按收入計算,工業(yè)機(jī)器人行業(yè)的全球市值達(dá)到了438億美元。其中,汽車行業(yè)使用的工業(yè)機(jī)器人是所有行業(yè)中最多的,截至2017年,該行業(yè)共有近90萬個機(jī)器人在使用,2021年,汽車行業(yè)新安裝了約9,782臺機(jī)器人,這個數(shù)量每年還在不斷增加。緊隨汽車行業(yè)之后工業(yè)機(jī)器人使用量較多的是電氣和電子行業(yè)以及塑料和化工行業(yè)。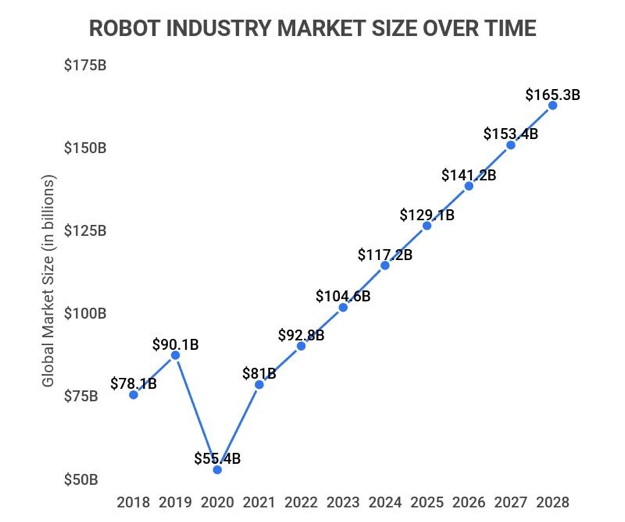
圖1:機(jī)器人行業(yè)年度市場增長情況
(圖源:Statista)
機(jī)器人的主要類型
市場上大多數(shù)的機(jī)器人都屬于工業(yè)機(jī)器人,這些機(jī)器為人類做各種工作,包括制造汽車、制造零件,甚至進(jìn)行外科手術(shù)。根據(jù)市場調(diào)研公司的數(shù)據(jù),約87%的公司使用的是傳統(tǒng)工業(yè)機(jī)器人,而74%的公司使用的是AGV(自動導(dǎo)引車)。
經(jīng)過幾十年的發(fā)展,工業(yè)機(jī)器人形成了較多的品類,歸納起來主要有固定機(jī)器人、自主移動機(jī)器人(AMR)、自動導(dǎo)引車(AGV)以及飛行機(jī)器人(無人機(jī))和水下機(jī)器人等。
固定機(jī)器人(機(jī)械臂)
這是一種發(fā)展最早、應(yīng)用最廣泛的工業(yè)機(jī)器人。一般來說,固定機(jī)器人是專為拾取和放置、分揀、組裝、焊接和精加工等任務(wù)而設(shè)計的機(jī)械臂。根據(jù)特性和用途劃分,目前市場上有七種主要類型的固定機(jī)器人,包括:鉸接式機(jī)械臂、笛卡爾或矩形機(jī)器人、SCARA機(jī)器人、球形機(jī)器人、德爾塔機(jī)器人、圓柱形機(jī)器人、協(xié)作機(jī)器人等。
下面我們將就這些機(jī)器人的具體特性以及優(yōu)缺點(diǎn)加以區(qū)分。
圖源:jcomp/freepik.com
01
鉸接式機(jī)械臂
對于工業(yè)機(jī)器人來說,復(fù)制人類手臂和手的所有細(xì)微移動方式將過于昂貴和復(fù)雜。目前業(yè)界的共識是,工業(yè)機(jī)器人手臂的6個自由度將足以完成幾乎任何需要的任務(wù),或者說,一個典型的鉸接式機(jī)械臂有六個軸或關(guān)節(jié)。
根據(jù)應(yīng)用和制造商的不同,這個數(shù)量可能有所不同。當(dāng)然,機(jī)器人的關(guān)節(jié)越多,其運(yùn)動就越平穩(wěn),也就越不像“機(jī)器人”。優(yōu)點(diǎn):動作靈活,能夠舉起重物;缺點(diǎn):可能需要用柵欄隔開,速度較慢,比其他機(jī)械臂更貴,需要更復(fù)雜的控制系統(tǒng)。02
笛卡爾或矩形機(jī)器人
這些機(jī)器人使用笛卡爾坐標(biāo)系(X、Y和Z)沿著三個軸(向前和向后、向上和向下以及左右)進(jìn)行線性運(yùn)動。所有三個關(guān)節(jié)都是平移的,這意味著關(guān)節(jié)的運(yùn)動被限制在一條直線上。
笛卡爾機(jī)器人可用于拾取和放置、材料處理、包裝自動化、存儲和檢索、切割和鉆孔以及更多應(yīng)用。優(yōu)點(diǎn):控制系統(tǒng)簡單。根據(jù)型號的不同,可以舉起非常重的物體,且價格比鉸接式機(jī)械臂便宜。缺點(diǎn):不能做旋轉(zhuǎn)運(yùn)動。03
SCARA機(jī)器人
SCARA機(jī)器人與笛卡爾機(jī)器人相似,它們在3個關(guān)節(jié)或軸上移動。然而,與笛卡爾機(jī)器人相比,SCARA機(jī)器人的兩個關(guān)節(jié)是旋轉(zhuǎn)的。因此,它們能夠進(jìn)行比笛卡爾機(jī)器人更復(fù)雜的運(yùn)動。
優(yōu)點(diǎn):適用于許多裝配應(yīng)用,快速準(zhǔn)確,裝配操作具有成本效益。SCARA機(jī)器人的工作包絡(luò)是圓柱形的。缺點(diǎn):不如鉸接式機(jī)械臂靈活,不如笛卡爾臂精確,沒有德爾塔機(jī)器人手臂那么快。04
球形機(jī)器人
球形機(jī)器人是一種較老的技術(shù),創(chuàng)建于20世紀(jì)50年代的第一個工業(yè)機(jī)器人就是一個球形機(jī)器人。有時可以用鉸接式機(jī)械臂取代。該種機(jī)器人由兩個旋轉(zhuǎn)關(guān)節(jié)和一個線性關(guān)節(jié)組成,可用于注塑、噴漆、電弧焊和點(diǎn)焊。
優(yōu)點(diǎn):控制系統(tǒng)比鉸接式機(jī)械臂更簡單,可以有很長的工作范圍。缺點(diǎn):不如鉸接式機(jī)械臂靈活,通常需要相當(dāng)大的占地面積。05
德爾塔機(jī)器人
德爾塔機(jī)器人也稱為平行機(jī)器人,有三個平行四邊形的機(jī)械臂,有時會在手臂末端放置旋轉(zhuǎn)關(guān)節(jié),以增加其運(yùn)動的靈活性。該機(jī)器人最初的設(shè)計目的是讓巧克力制造商能夠拾取巧克力塊并將其放入盒子中。
優(yōu)點(diǎn):用于拾取和放置操作的機(jī)械臂速度很快,關(guān)節(jié)和手臂非常輕,能實(shí)現(xiàn)高速和精確的操作。
缺點(diǎn):不能攜帶重型有效載荷,限制了臂端工具(EoAT)的類型及其可以處理的任務(wù),且不適合在垂直平面中處理任務(wù)。
06
圓柱形機(jī)器人
圓柱形機(jī)器人在底座上至少有一個旋轉(zhuǎn)關(guān)節(jié)和兩個線性關(guān)節(jié)。它通常用于狹小的工作空間,非常適合需要圓形對稱的物體(如電線、管道),如磨削、裝配和點(diǎn)焊等應(yīng)用。
優(yōu)點(diǎn):精確度高。缺點(diǎn):技術(shù)陳舊,運(yùn)動靈活性有限。07
協(xié)作機(jī)器人(Cobot)
Cobot可在安全的工作環(huán)境中實(shí)現(xiàn)人機(jī)交互,而不需要圍欄或傳統(tǒng)工業(yè)機(jī)器人應(yīng)用中采取的其他安全措施。
優(yōu)點(diǎn):能夠安全地與人一起工作,且操作員能夠在不必編寫編程代碼的情況下教機(jī)器人手臂進(jìn)行動作,具體過程是操作員只需抓住機(jī)器人手臂,按照機(jī)器人需要的方式進(jìn)行物理移動,然后,機(jī)器人手臂即可復(fù)制演示的動作。缺點(diǎn):力量和速度有限,不適合重型應(yīng)用或非常高速的任務(wù)。
自主移動機(jī)器人(AMR)
自主移動機(jī)器人代表了工業(yè)機(jī)器人市場中一個快速增長的細(xì)分市場,它們有多種形狀和尺寸。手推車或帶輪子的車輛形式的AMR通常用于在工廠或倉庫設(shè)施內(nèi)運(yùn)輸貨物,它們配備了傳感器、車載計算能力和電動機(jī),使其能夠在設(shè)施周圍移動并創(chuàng)建設(shè)施的內(nèi)部地圖。一旦創(chuàng)建了內(nèi)部地圖,就可以向AMR指示其需要前往的目的地。
AMR的一個關(guān)鍵特征是,它們可以“自主”地從一個地方移動到另一個地方,同時避開沿途的障礙,甚至可以規(guī)劃一條全新的路線到達(dá)目的地。隨著計算機(jī)視覺、人工智能和抓取技術(shù)的進(jìn)步,使得機(jī)器人對機(jī)器人(robot-to-robot)的協(xié)作成為可能。在這種情況下,輪式推車AMR將貨物帶到機(jī)械臂上,關(guān)節(jié)式機(jī)械臂再將貨物放到指定位置。
自動導(dǎo)引車(AGV)
AGV通常采用帶輪子的車輛形式,是一種比AMR更古老的技術(shù)。它們的機(jī)載智能較少,因此不如AMR那樣具有自主性,不具備繪制設(shè)施地圖的能力。相反,它們依賴于為自己制定的道路,路徑由放置在地板上的導(dǎo)引線、特殊膠帶或其他類型的導(dǎo)軌定義。如果AGV在行駛途中遇到障礙,它只能停下來尋求幫助。隨著AGV被賦予了更多的車載計算能力,AGV和AMR之間的區(qū)別正變得越來越模糊。
壓力傳感器在醫(yī)療電子中的應(yīng)用非常廣泛,可用在輸液泵、血壓計和睡眠呼吸暫停機(jī)等設(shè)備中。TE的FX29是一種緊湊型壓力傳感器,在具有毫伏、模擬或數(shù)字輸出信號的堅固的傳感器系列中展現(xiàn)出了出色的性價比,并針對嵌入式力傳感應(yīng)用進(jìn)行了優(yōu)化,包括一次性醫(yī)療設(shè)備和健身器材。
飛行機(jī)器人(無人機(jī))
無人機(jī)(UAV)正在越來越多地被用于各種工業(yè)目的。根據(jù)設(shè)計,工業(yè)無人機(jī)可以是一種自主移動機(jī)器人(AMR),一些型號能自動檢測并避開障礙物,獨(dú)立導(dǎo)航至目的地。現(xiàn)在,一些工業(yè)無人機(jī)被賦予了很多任務(wù),包括飛越露天采礦作業(yè)或基礎(chǔ)設(shè)施項(xiàng)目、監(jiān)控建筑項(xiàng)目的進(jìn)展、進(jìn)行倉庫庫存管理等。
水下機(jī)器人
用于水下的機(jī)器人種類繁多,一些水下機(jī)器人被設(shè)計成自主的(自動水下航行器AUV),一些則被設(shè)計成有線或無線遠(yuǎn)程控制。水下機(jī)器人可用于海洋石油平臺、管道的檢查和科學(xué)研究,其他應(yīng)用包括使用水下機(jī)器人檢查橋梁底部、水電大壩進(jìn)水口和珊瑚礁等。
工業(yè)機(jī)器人產(chǎn)業(yè)有多大?
人類的工作會被工業(yè)機(jī)器人取代嗎?目前來看,只有那些重復(fù)性工作將逐漸被機(jī)器人所取代,而高智商、需要創(chuàng)造力的工作則很難被機(jī)器人代替。在快餐店做薯?xiàng)l、焊接、駕駛火車和回答基本的客戶服務(wù)問題這些重復(fù)性工作對機(jī)器人來說相對容易接管。
據(jù)估計,到2025年,機(jī)器人將取代目前由人類占據(jù)的8,500萬個工作崗位。由于機(jī)器人通常能勝任入門級職位所需的基本任務(wù),這一變化也將為人類開辟更多高級管理崗位。
最近幾年,機(jī)器人行業(yè)正以相對較快的速度增長,全球約有300萬臺工業(yè)機(jī)器人在使用中。另據(jù)Statista的數(shù)據(jù),到2024年,全球工業(yè)機(jī)器人出貨量預(yù)計將達(dá)到51.8萬臺,高于2020年的39.4萬臺。
根據(jù)2020年11月Reportlinker的一份報告,工業(yè)機(jī)器人在制造業(yè)和工業(yè)設(shè)施中的使用迅速擴(kuò)大,是最大的機(jī)器人細(xì)分市場。預(yù)計到2025年將從2020年的766億美元增長到1,768億美元,復(fù)合年增長率為18.2%。這一增長主要是由制造商推動的。
工業(yè)機(jī)器人中的電機(jī)驅(qū)動與控制
機(jī)器人是一個多元化的行業(yè),運(yùn)動是機(jī)器人功能的一部分,電機(jī)可將機(jī)器人的運(yùn)動勢能轉(zhuǎn)化為機(jī)械能。一些機(jī)器人的部件與人類相似,例如:手臂、手腕、手等。使用的主要運(yùn)動形式包括:手臂的垂直、徑向和旋轉(zhuǎn)運(yùn)動;手腕的俯仰、滾轉(zhuǎn)和偏航;從一個地方移動到另一個地方的運(yùn)動能力。
機(jī)器人的每個動作以及可移動部分都需要某種類型的電機(jī)支持。所使用的電機(jī)類型從注重轉(zhuǎn)矩的交流電機(jī)到需要更多角度控制的步進(jìn)電機(jī)。在兩者之間,可選擇有刷直流電機(jī),這種電機(jī)具有成本效益且簡單,但效率低且易磨損。
目前優(yōu)秀的替代方案是采用無刷直流(BLDC)電機(jī),它的效率更高,與使用機(jī)械開關(guān)的有刷電機(jī)相比,BLDC電機(jī)沒有機(jī)械開關(guān),而是使用帶刷的旋轉(zhuǎn)電樞進(jìn)行電氣連接。運(yùn)動部件的減少使BLDC電機(jī)的使用壽命更長,僅受滾珠軸承磨損的限制。因?yàn)闆]有電刷,BLDC電機(jī)還表現(xiàn)出優(yōu)異的耐用性和低噪聲特性。德國航空航天中心的David機(jī)器人就擁有76個BLDC電機(jī)和165個位置傳感器,它的工作速度和能力幾乎與人類相當(dāng)。
電機(jī)控制是一個非常活躍的研究領(lǐng)域,所有領(lǐng)先的半導(dǎo)體供應(yīng)商都在不斷開發(fā)新的產(chǎn)品以提供更高效的電機(jī)控制。
1?
STSTEVAL-SPIN3201
STMicroelectronics的STSPIN32F0無刷直流控制器是一款系統(tǒng)級封裝器件,提供了適用于不同驅(qū)動模式的三相BLDC電機(jī)驅(qū)動方案。器件有三個半橋式柵極驅(qū)動,電流容量為600mA,能夠驅(qū)動功率MOSFET或IGBT。由于集成的互鎖功能,不能同時打開同一半橋的高、低側(cè)開關(guān)。
此外,器件內(nèi)部的3.3V DC/DC降壓轉(zhuǎn)換器可為MCU和外部元件供電,而其內(nèi)部的LDO線性穩(wěn)壓器則可為柵極驅(qū)動器供電。集成的MCU(STM32F031C6)能夠?qū)崿F(xiàn)電機(jī)磁場矢量控制(FOC)、6步無傳感器等其它先進(jìn)的驅(qū)動算法,包括速度控制環(huán)等。同時,STSPIN32F0器件具有的過溫和欠壓鎖定保護(hù)功能,可將器件置于待機(jī)模式,以減少功耗。
STEVAL-SPIN3201是一款基于STSPIN32F0和STD140N6F7 MOSFET的三相BLDC電機(jī)驅(qū)動板,為低壓電機(jī)驅(qū)動應(yīng)用提供了一種經(jīng)濟(jì)簡易的解決方案。

圖2:STEVAL-SPIN3201三相BLDC電機(jī)驅(qū)動板
(圖源:STMicroelectronics)
BLDC提供了高效率,在許多應(yīng)用中使用了出色的扭矩和速度值。扭矩代表電機(jī)的旋轉(zhuǎn)力大小,BLDC的主要設(shè)計宗旨是優(yōu)化轉(zhuǎn)矩。速度和扭矩由瞬態(tài)的開/關(guān)持續(xù)時間比控制。通常,采用用于驅(qū)動繞組的PWM信號的形式。單相、兩相和三相電機(jī)的使用使這種情況更加復(fù)雜。尤其是當(dāng)控制器在低電流信號下工作時,電機(jī)需要高電流量。因此,電機(jī)驅(qū)動器要能夠獲取低電流控制信號,然后將其轉(zhuǎn)換為可以驅(qū)動電機(jī)的高電流信號。
2?
TIDRV8313
Texas Instruments的DRV8313是一款最大電壓為65V的3A峰值三相電機(jī)驅(qū)動器,提供三個可獨(dú)立控制的半H橋驅(qū)動器。雖然也可被用于驅(qū)動螺線管或其它負(fù)載,但它主要用于驅(qū)動一個三相BLDC電機(jī)。每個輸出的驅(qū)動通道包含采用半H橋配置的功率N-MOSFET。這個設(shè)計將每個驅(qū)動器的接地端子接至引腳,以在每個輸出上執(zhí)行電流感測。此外,該器件還具備過流保護(hù)、短路保護(hù)、欠壓閉鎖和過溫保護(hù)的內(nèi)部關(guān)斷功能。

圖3:DRV8313評估版為在梯形換向中運(yùn)行三相BLDC電機(jī)提供了一種經(jīng)濟(jì)高效的無傳感器解決方案(圖源:Mouser)
電機(jī)驅(qū)動器的目標(biāo)是確保正確的電機(jī)控制,以便在應(yīng)用中相應(yīng)地控制電機(jī)的速度和方向。微控制器(MCU)非常適合用于開發(fā)直流(和交流)電機(jī)高效控制回路所需的計算功能。
3?
Renesas RL78/G14
現(xiàn)在,許多半導(dǎo)體供應(yīng)商開始大量提供以BLDC電機(jī)控制為目標(biāo)的MCU,例如,Renesas Electronics的RL78/G14系列微控制器(MCU)就是一款多功能通用微控制器,適合用于電機(jī)控制、工業(yè)和計量應(yīng)用,在低功耗電流和高計算性能之間實(shí)現(xiàn)了平衡。RL78/G14 MCU的內(nèi)置多功能定時器通過三相互補(bǔ)PWM輸出支持三相電機(jī)控制。此外,RL78/G14系列還集成了片上振蕩器、數(shù)據(jù)閃存、模數(shù)轉(zhuǎn)換器和數(shù)模轉(zhuǎn)換器以及比較器等電路。

圖4:RL78/G14系列微控制器
(圖源:Renesas Electronics)
人工智能與工業(yè)機(jī)器人
人工智能可能會給工業(yè)機(jī)器人帶來更強(qiáng)的自主性,使它們能夠在零人工輸入的情況下自我糾正、學(xué)習(xí)和改進(jìn),從而提升機(jī)器人在行業(yè)中的價值。遺憾的是,截至2021年,我們在行業(yè)中還無法看到真正的人工智能機(jī)器人。不過,Market research Future(MRFR)的一份綜合研究報告《人工智能機(jī)器人市場按產(chǎn)品、類型、技術(shù)和應(yīng)用——2030年預(yù)測》則給出了樂觀的估計,報告預(yù)計人工智能機(jī)器人市場將在2022年至2030年期間以約22.30%的復(fù)合年增長率快速增長,到2030年底估值將達(dá)到約445億美元。
人工智能和其他技術(shù)進(jìn)步將增強(qiáng)人與機(jī)器人的互動,在涉及機(jī)器智能、連接和控制的技術(shù)方面迅速取得突破將擴(kuò)大機(jī)器人的能力和范圍,同時簡化人機(jī)交互。在最有前途的創(chuàng)新中,人工智能將使機(jī)器人能夠處理無人監(jiān)督的意外情況。同時,群體智能將增加移動機(jī)器人在位置上共享和更改任務(wù)的靈活性。成像系統(tǒng)將增強(qiáng)機(jī)器人的自主檢查、分析和移動能力。機(jī)器人技術(shù)具有巨大的上行潛力,人工智能機(jī)器人的能力會更加令人驚嘆。
該發(fā)布文章為獨(dú)家原創(chuàng)文章,轉(zhuǎn)載請注明來源。對于未經(jīng)許可的復(fù)制和不符合要求的轉(zhuǎn)載我們將保留依法追究法律責(zé)任的權(quán)利。
關(guān)于貿(mào)澤電子
貿(mào)澤電子(Mouser Electronics)是一家全球知名的半導(dǎo)體和電子元器件授權(quán)代理商,分銷超過1200家品牌制造商的680多萬種產(chǎn)品,為客戶提供一站式采購平臺。我們專注于快速引入新產(chǎn)品和新技術(shù),為設(shè)計工程師和采購人員提供潮流選擇。歡迎關(guān)注我們!
更多精彩

原文標(biāo)題:誰在重塑工業(yè)機(jī)器人的未來?
文章出處:【微信公眾號:貿(mào)澤電子】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
-
貿(mào)澤電子
+關(guān)注
關(guān)注
16文章
1170瀏覽量
97501
原文標(biāo)題:誰在重塑工業(yè)機(jī)器人的未來?
文章出處:【微信號:貿(mào)澤電子,微信公眾號:貿(mào)澤電子】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
工業(yè)通信界的“月老”:CC\\-Link IE和DeviceNet如何牽起機(jī)器人的“紅線”
工業(yè)機(jī)器人與協(xié)作機(jī)器人概念不同

盤點(diǎn)#機(jī)器人開發(fā)平臺
工業(yè)機(jī)器人的未來發(fā)展方向:富唯智能以具身智能重構(gòu)人機(jī)協(xié)作新范式
工業(yè)機(jī)器人工作站的建設(shè)意義
復(fù)合機(jī)器人,重塑工業(yè)4.0,人機(jī)協(xié)作未來 #工業(yè)機(jī)器人 #復(fù)合機(jī)器人 #協(xié)作機(jī)器人
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人大模型
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】1.初步理解具身智能
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】+初品的體驗(yàn)
安川工業(yè)機(jī)器人結(jié)構(gòu)

工業(yè)機(jī)器人常用的編程方式
在用機(jī)器人與未來機(jī)器人并行推進(jìn)的權(quán)重關(guān)系

國產(chǎn)工業(yè)機(jī)器人與進(jìn)口機(jī)器人區(qū)別有哪些
工業(yè)機(jī)器人AMR的最強(qiáng)大腦,你了解多少?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論