") Kalman濾波通俗理解+實(shí)際應(yīng)用
Kalman濾波通俗理解+實(shí)際應(yīng)用

01 Kalman用于解決什么的問(wèn)題
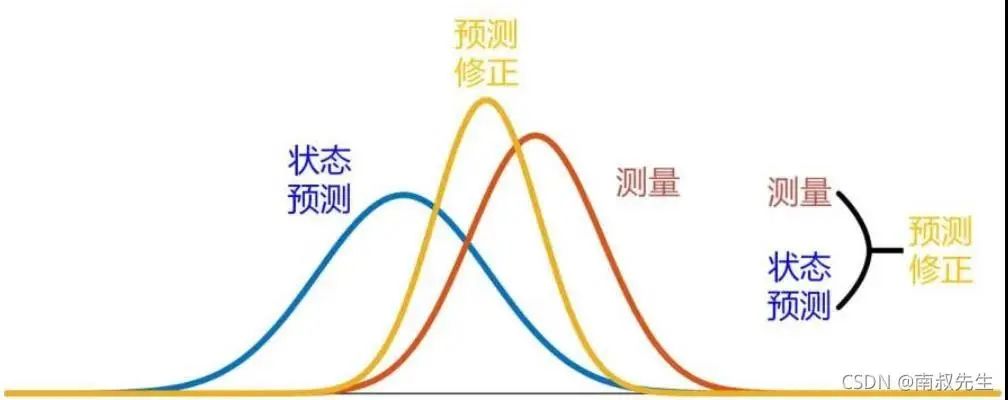
卡爾曼濾波是一種利用線性系統(tǒng)狀態(tài)方程,通過(guò)系統(tǒng)輸入輸出觀測(cè)數(shù)據(jù),對(duì)系統(tǒng)狀態(tài)進(jìn)行最優(yōu)估計(jì)的算法。由于觀測(cè)數(shù)據(jù)中包括系統(tǒng)中的噪聲和干擾的影響,所以最優(yōu)估計(jì)也可看作是濾波過(guò)程。
人話就是:線性數(shù)學(xué)模型算出預(yù)測(cè)值+傳感測(cè)量值=更準(zhǔn)確的測(cè)量值。
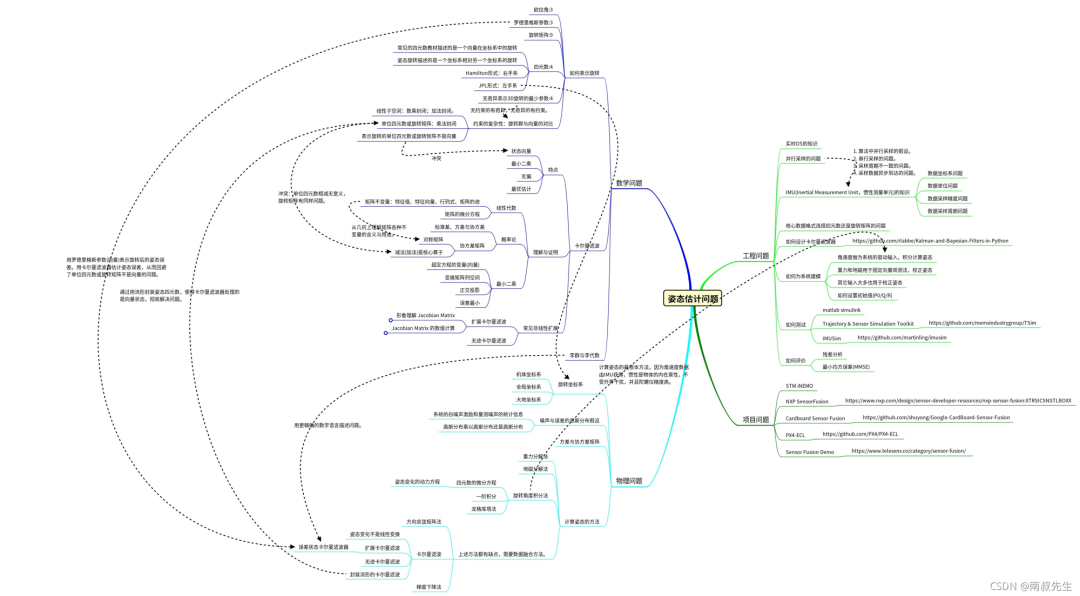
02 先來(lái)看一下姿態(tài)估計(jì)問(wèn)題
03 看幾個(gè)例子
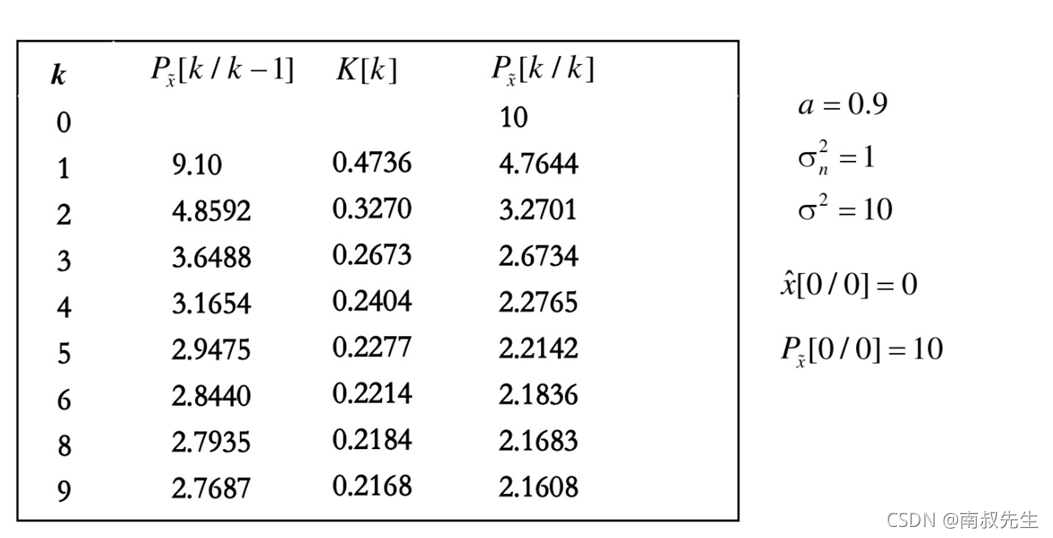
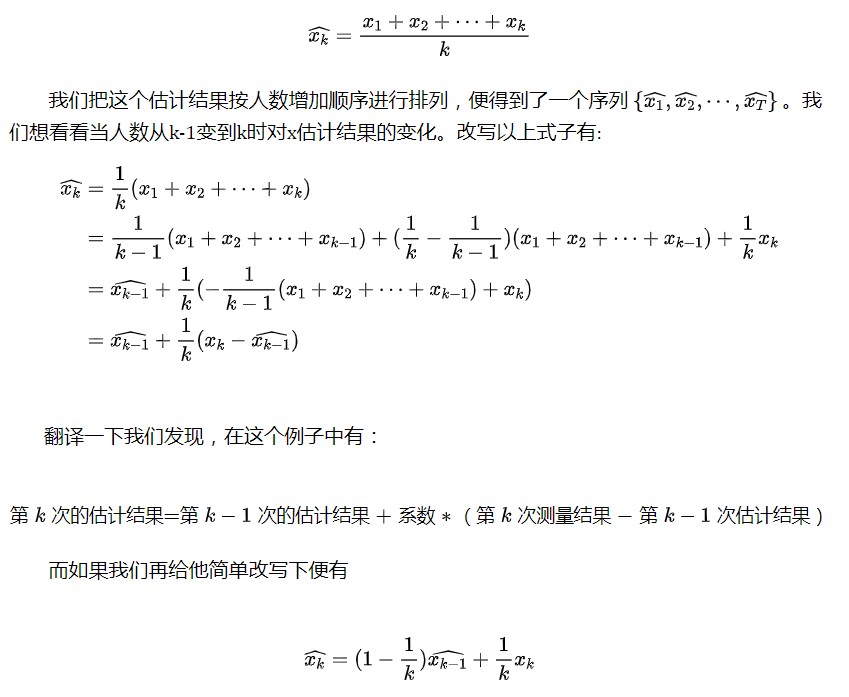
(1)例題1

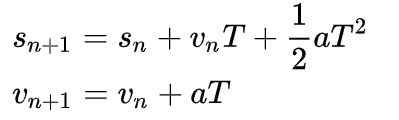
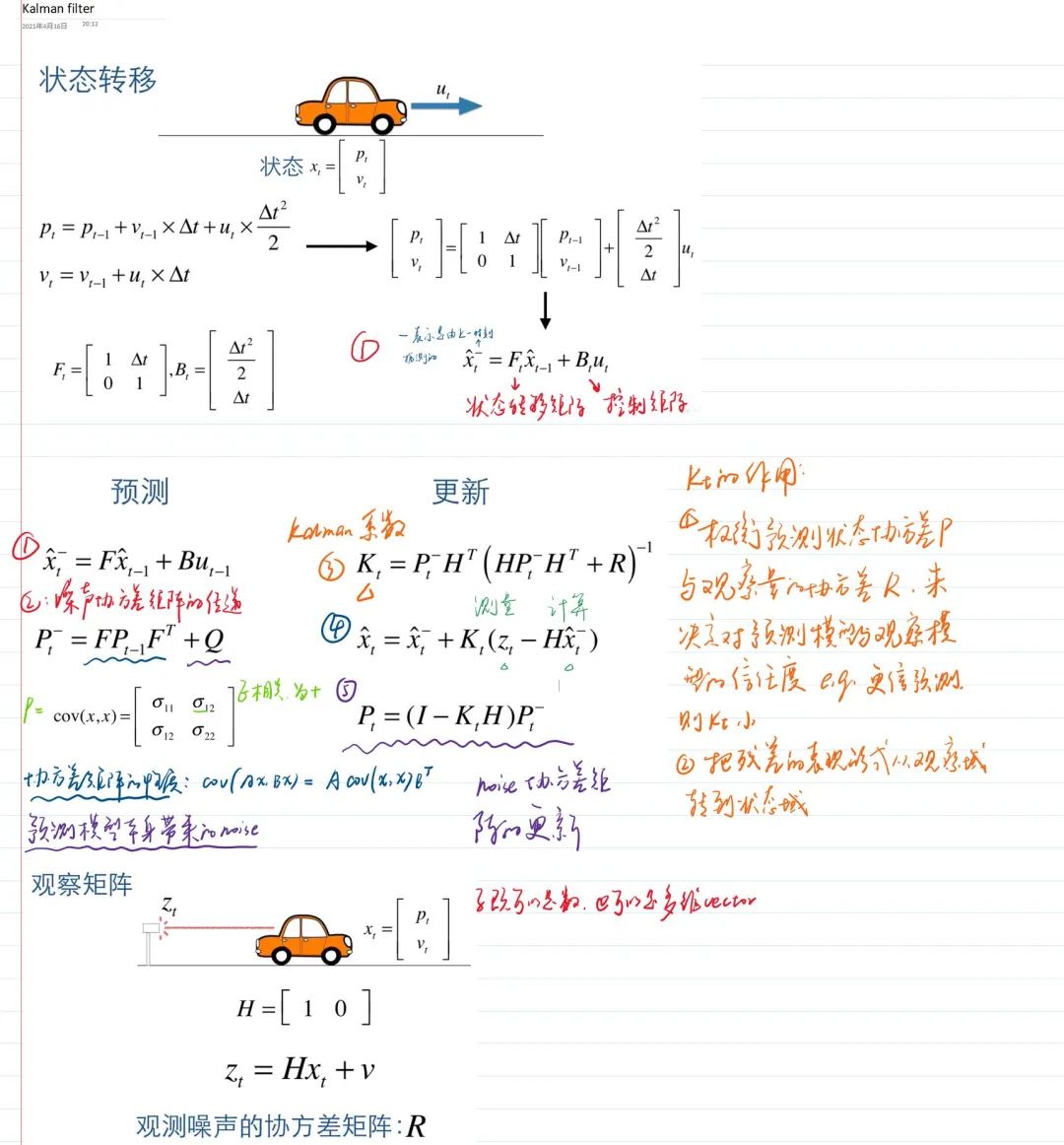
(2)例題2——運(yùn)動(dòng)模型,寫出勻加速運(yùn)動(dòng)的狀態(tài)轉(zhuǎn)移方程
第一步,根據(jù)基本的物理運(yùn)動(dòng)方程,寫出狀態(tài)方程
第二步,寫出觀測(cè)方程模型
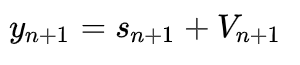
我開始也不明白這個(gè)觀測(cè)方程是啥意思,實(shí)際上這是模擬傳感器的測(cè)量值,S代表位移,V代表誤差。這里代表目標(biāo)測(cè)量量為位移。
第三步,將第一步和第二步的狀態(tài)方程與觀測(cè)方程寫成矩陣形式
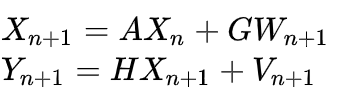
根據(jù)對(duì)應(yīng)關(guān)系,可以得到系數(shù):

其中A叫做狀態(tài)轉(zhuǎn)移矩陣,G叫做控制矩陣,H叫做預(yù)測(cè)矩陣
給定一個(gè)初值,就可以迭代得到后面的值了。
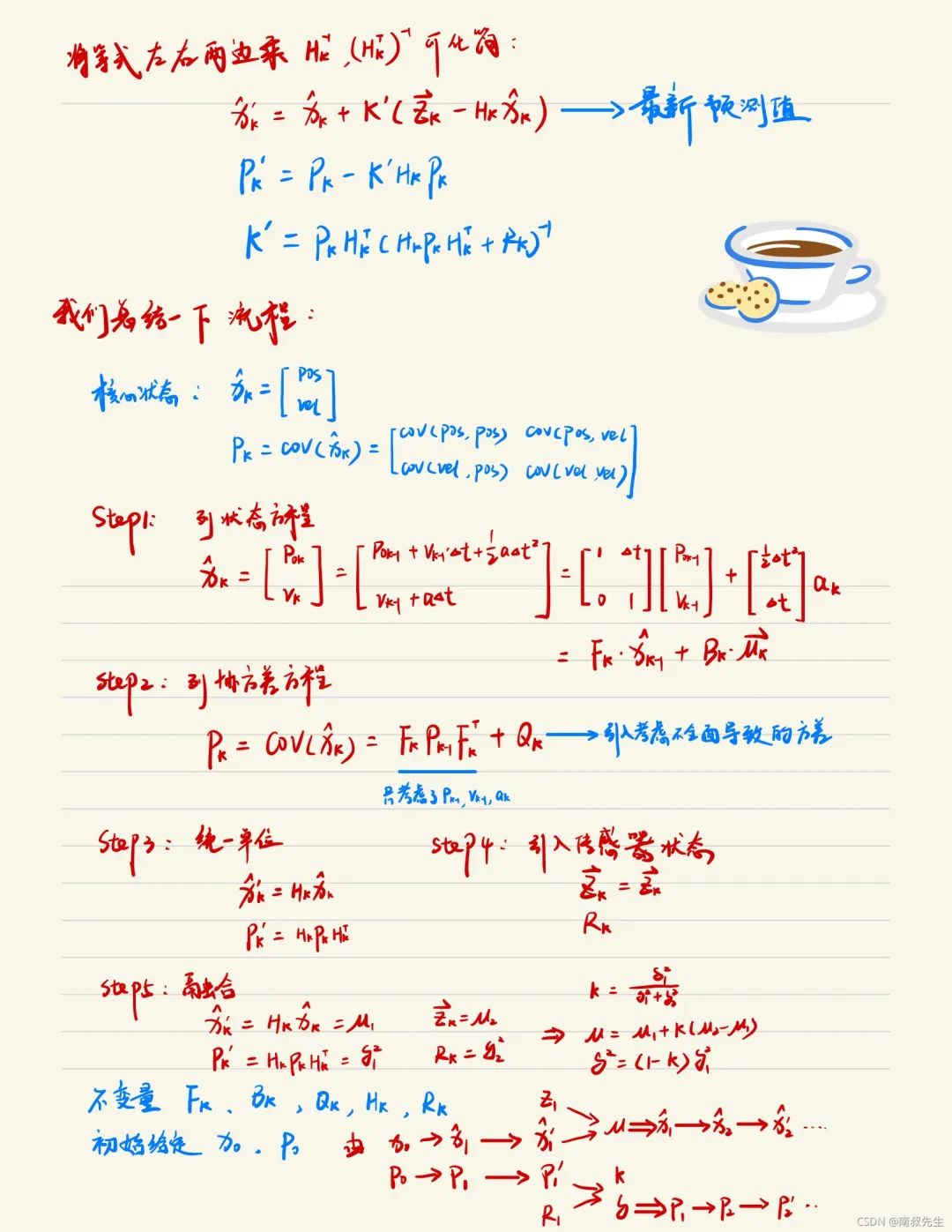
04 計(jì)算流程
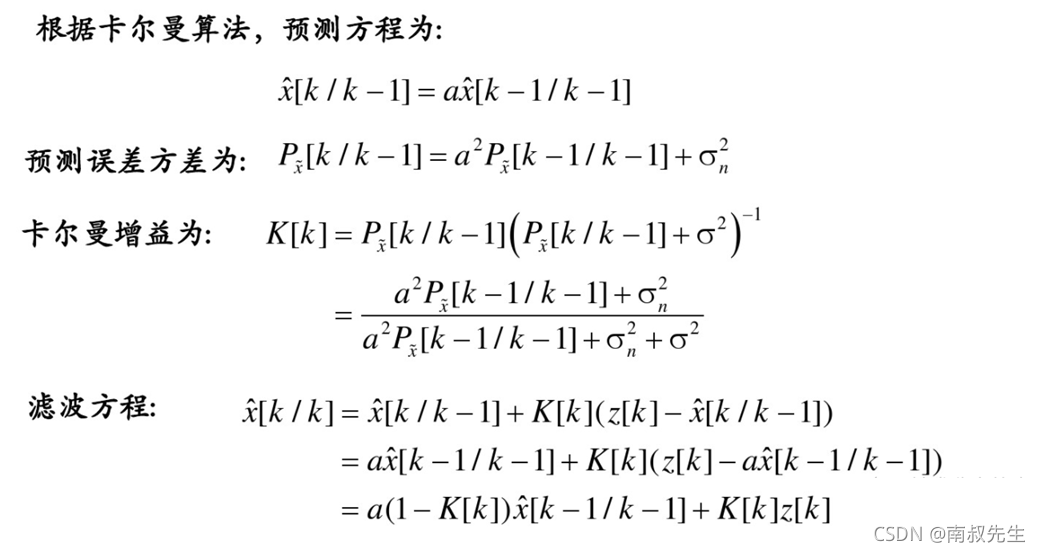
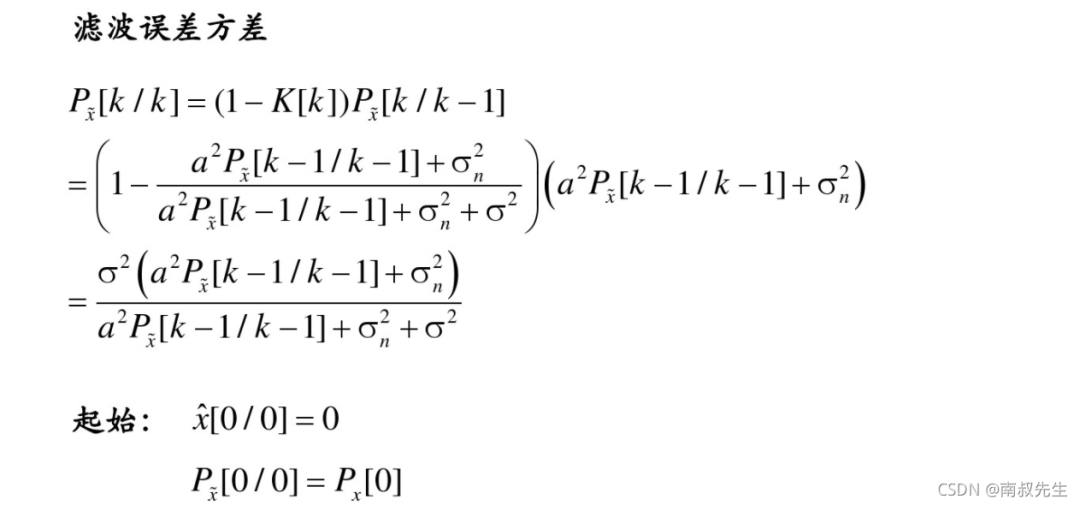
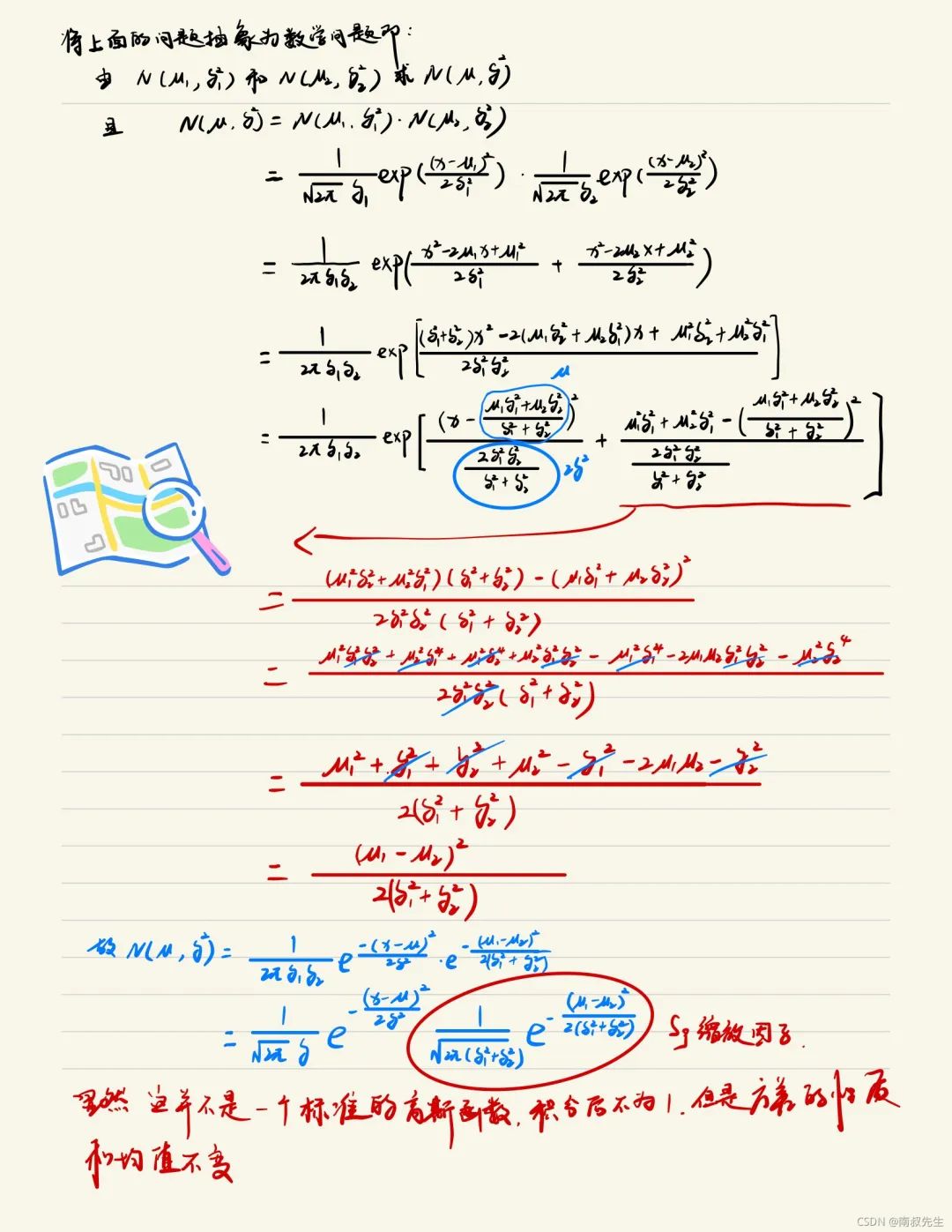
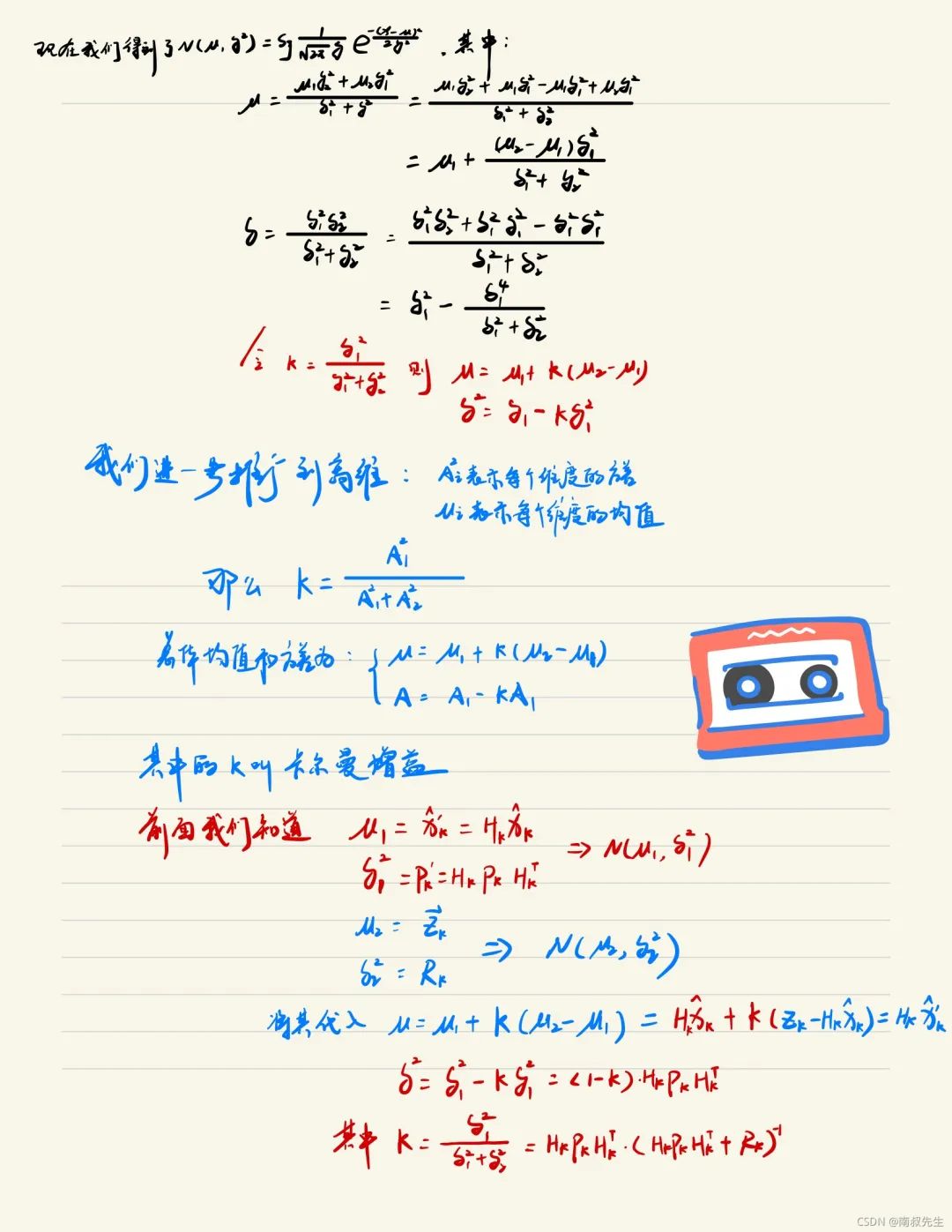
05 詳細(xì)推導(dǎo)

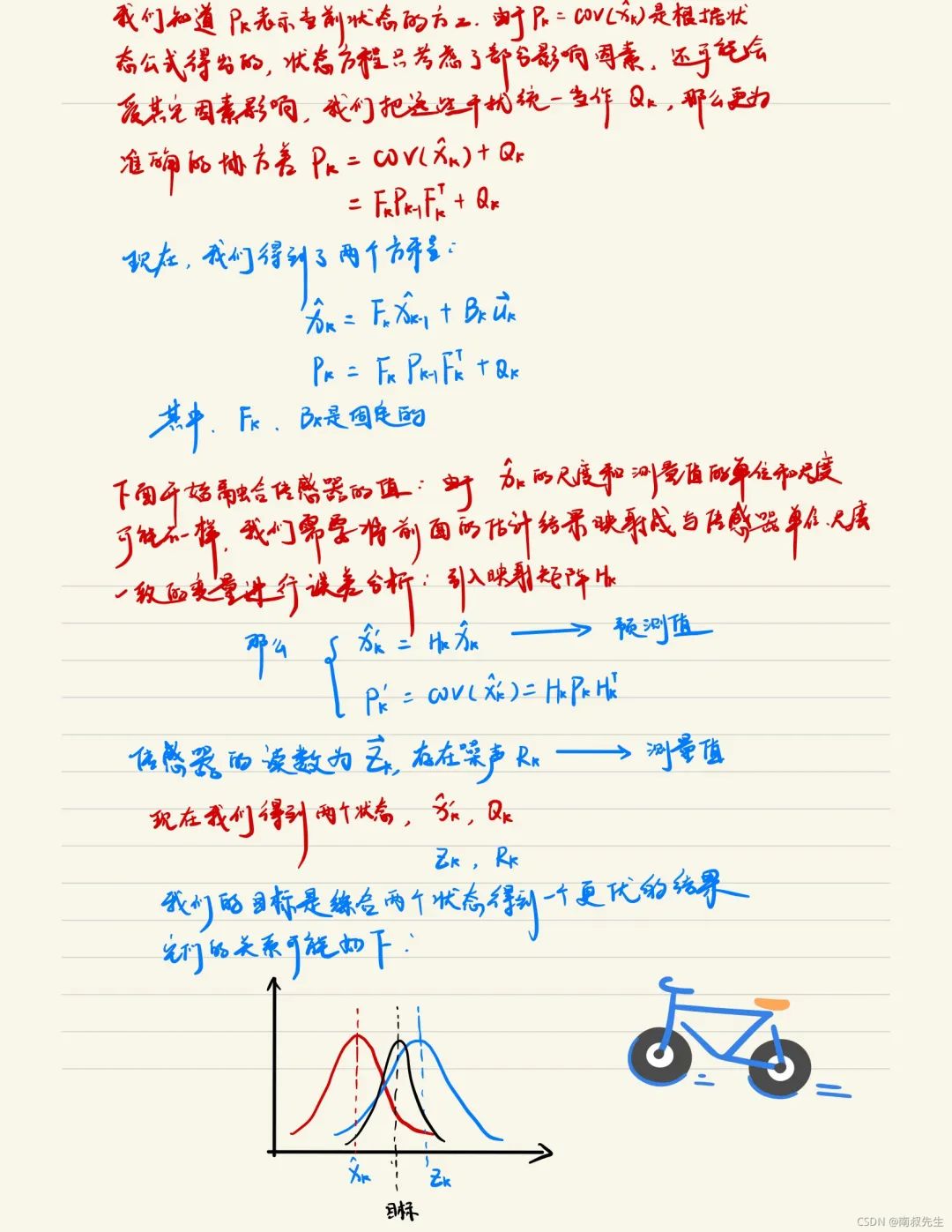
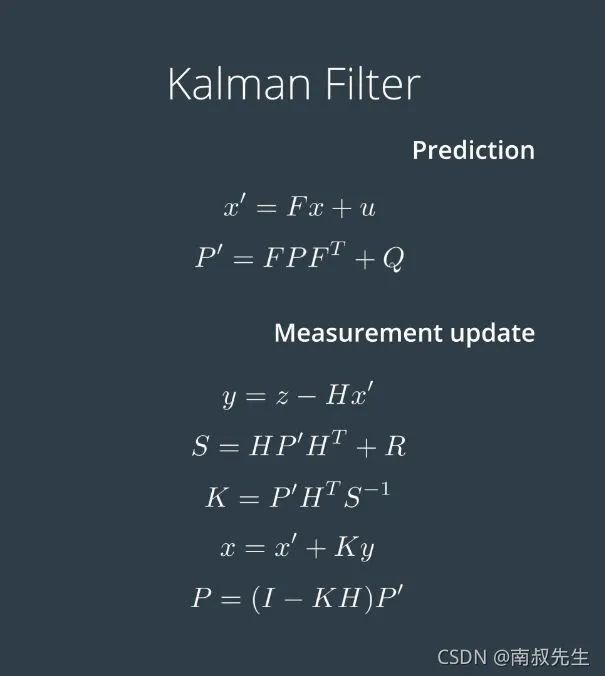
下圖更簡(jiǎn)潔的展示了計(jì)算流程:
其中F為控制矩陣,Q為預(yù)測(cè)不確定性,R為傳感器噪聲,H為映射矩陣,y為誤差,
S為方差之和,K為卡爾曼增益,P為更新后的協(xié)方差
審核編輯:劉清
-
狀態(tài)機(jī)
+關(guān)注
關(guān)注
2文章
493瀏覽量
28254 -
卡爾曼濾波算法
+關(guān)注
關(guān)注
0文章
12瀏覽量
2194
原文標(biāo)題:Kalman濾波通俗理解+實(shí)際應(yīng)用
文章出處:【微信號(hào):3D視覺工坊,微信公眾號(hào):3D視覺工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
基于Kalman濾波的多尺度融合估計(jì)新算法
Kalman濾波在視頻監(jiān)控中的應(yīng)用
FPGA的Kalman濾波器的設(shè)計(jì)
Kalman濾波算法在加速度計(jì)自標(biāo)定中的應(yīng)用
基于Kalman濾波的俯仰角速度估計(jì)
基于改進(jìn)Kalman濾波的可見光極小目標(biāo)TBD跟蹤方法_胡本川
詳細(xì)闡述Kalman濾波模型





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論