") 像 “父親” 般為你保駕護航的自動駕駛技術!(互動有禮)
像 “父親” 般為你保駕護航的自動駕駛技術!(互動有禮)

父愛如山,父親在生活中總是為我們提供指導和支持,并默默地守護著我們的成長和安全。現(xiàn)在,自動駕駛技術也如同父親般,在通過持續(xù)的研究和創(chuàng)新,不斷演進,為我們的出行提供堅實的保障和護航。
NVIDIA 正著力將數(shù)據(jù)驅(qū)動型模型納入所有類型的交通場景仿真之中,包括行人、自行車騎行者和場景編輯等領域。在父親節(jié)這一天,跟隨本期視頻和文章,一同了解NVIDIA 研究人員提出的一種名為 STRIVE(Stress-Test Drive 壓力試駕)的新方法。該方法使用生成式 AI 交通模型自動生成自動駕駛仿真中的潛在事故場景,允許在各種現(xiàn)實情況下安全地大規(guī)模測試自動駕駛堆棧的規(guī)劃部分。
編輯注:NVIDIA 自動駕駛實驗室系列視頻,以工程技術為重點的視角關注實現(xiàn)自動駕駛汽車的各個挑戰(zhàn)以及 NVIDIA DRIVE AV 軟件團隊如何應對這些問題。
本期NVIDIA 自動駕駛實驗室視頻為大家介紹了 NVIDIA 最近開展的一項研究,即利用 AI 自動生成仿真事故場景,來進行安全且可擴展的自動駕駛汽車測試。
現(xiàn)實世界中存在著各種類型的交通狀況,自動駕駛汽車必須能夠安全應對以上狀況。其中包括由于車距較近導致的危險事故,在這種狀況下,其他道路使用者在行駛過程中進行的意外操作可能導致碰撞事故發(fā)生。
然而,對開發(fā)人員而言,在這些類型的場景中開發(fā)和測試自動駕駛汽車極具挑戰(zhàn)性。因為現(xiàn)實世界中這類碰撞數(shù)據(jù)十分罕見,此外,若要在現(xiàn)實世界中重現(xiàn)此類情況來進行測試則極不安全,并且該方法難以擴展并實現(xiàn)規(guī)模化。
利用 STRIVE 算法
對自動駕駛汽車規(guī)劃模塊進行壓力測試
在自動駕駛汽車堆棧中,規(guī)劃模塊負責決定車輛應如何行駛。若要對規(guī)劃模塊進行全面的測試,則需要收集真實且多樣化的潛在交通事故場景數(shù)據(jù)集。
NVIDIA 開發(fā)了名為STRIVE(壓力試駕)的算法,可為自動駕駛汽車的規(guī)劃模塊訓練創(chuàng)建豐富的事故場景(圖 1)。開發(fā)人員可通過分析該模塊在仿真場景中的存在的規(guī)劃短板,在自動駕駛汽車上路前進行糾正,以便改善車輛的規(guī)劃行為。
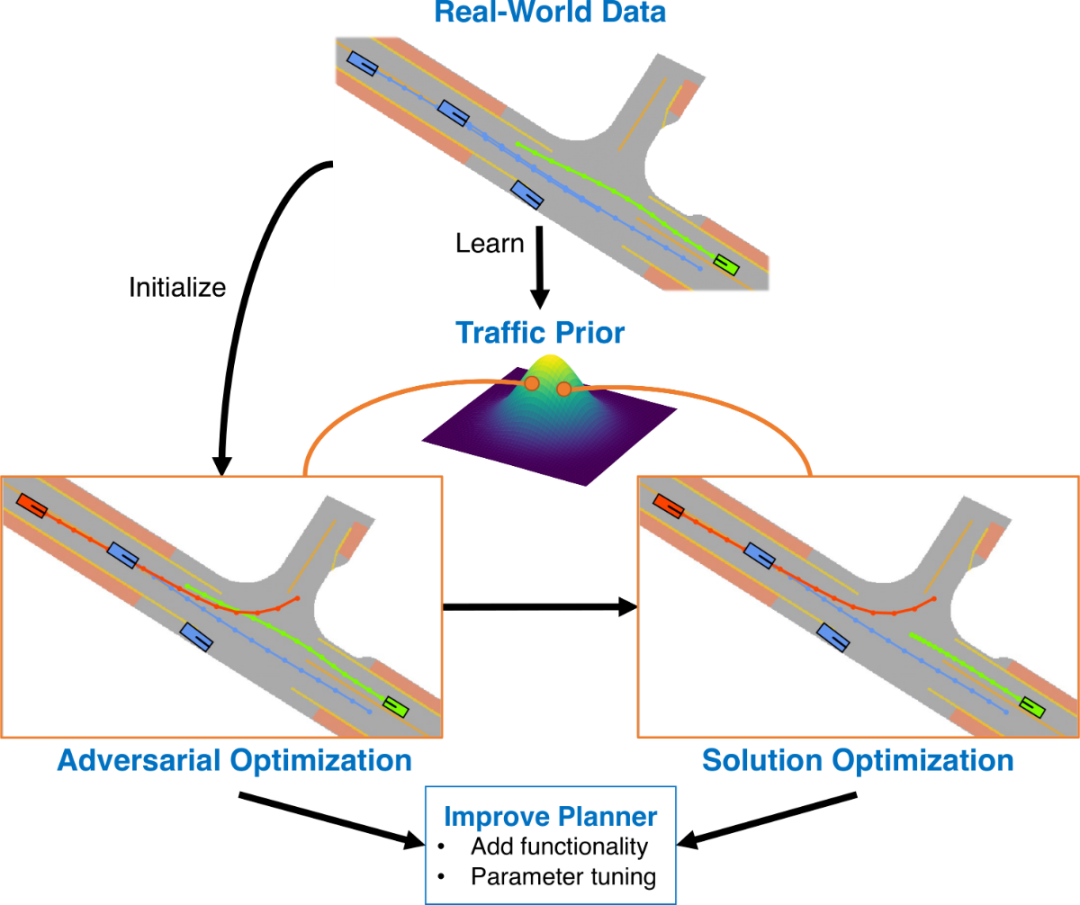
圖 1:STRIVE 生成自動駕駛汽車的交通事故場景
利用優(yōu)化方式生成潛在事故場景
STRIVE 算法從真實世界場景著手,使目標測試車輛按照預期規(guī)劃行駛。而后,STRIVE 利用對抗優(yōu)化來修改場景中其他車輛的 2D 軌跡,以生成碰撞場景。其中,用于與自動駕駛汽車碰撞的干擾車輛可以由用戶進行指定,也可由 STRIVE 在優(yōu)化過程中自動選擇。
該解決方案中的另一項優(yōu)化是訓練自動駕駛汽車生成機動策略,來避免交通事故的發(fā)生,從而提高自動駕駛汽車的規(guī)劃能力。STRIVE 創(chuàng)建了真實且多樣化的事故場景,并提供了實用的解決方案以改善自動駕駛,如圖 2 所示。
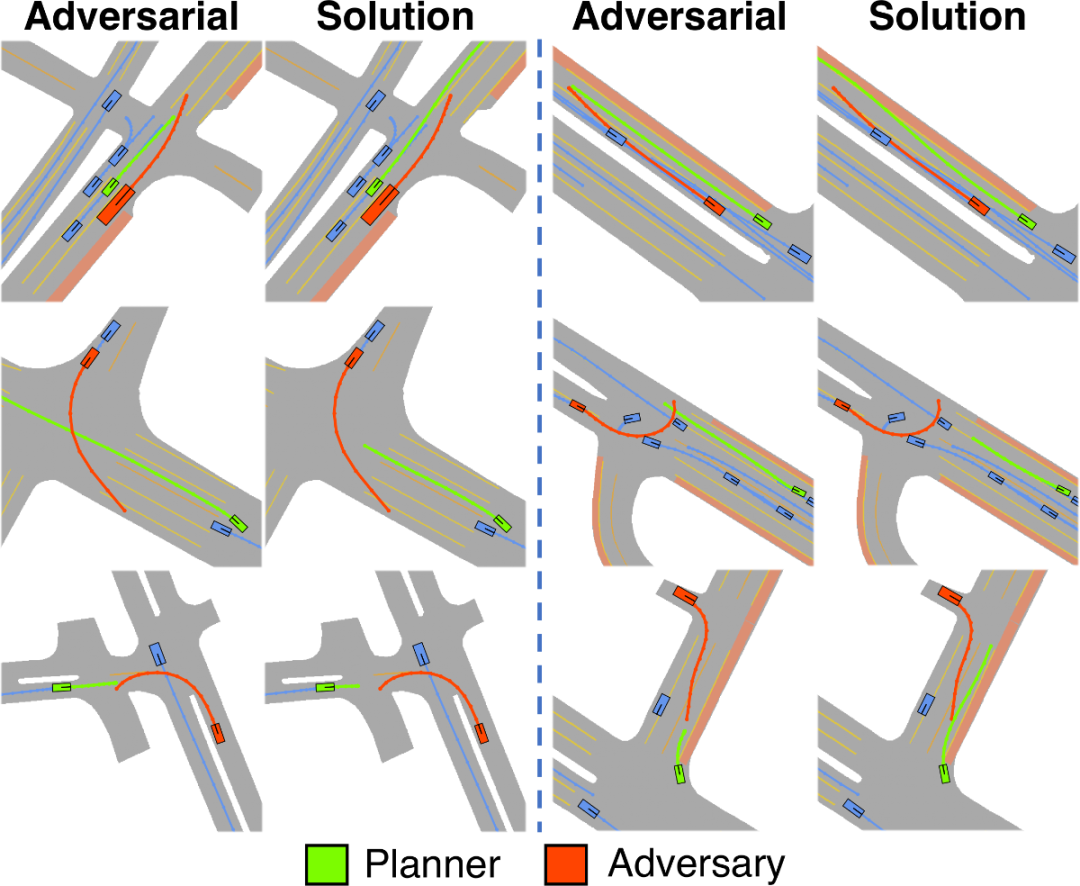
圖 2:STRIVE 生成的潛在事故和解決方案示例
數(shù)據(jù)驅(qū)動型交通模型的真實性
仿真事故場景必須真實且能精確反映現(xiàn)實世界的交通狀況和物理環(huán)境。STRIVE 使用 AI 交通模型,基于大型真實世界數(shù)據(jù)集進行自動駕駛汽車訓練,以了解現(xiàn)實中車輛的行駛軌跡。該模型顯示為“Traffic Prior”,如圖 1 所示。
在優(yōu)化過程中,STRIVE 使用經(jīng)過訓練的 AI 模型進行檢查,以確保其生成的場景真實有效,即場景中需包含事故狀況。
從 2D 軌跡到 3D 仿真
STRIVE 在NVIDIA DRIVE Sim中運行,基于十字交叉路口創(chuàng)建多種事故場景。STRIVE 會基于現(xiàn)實世界的駕駛行為,進行常規(guī)交通重建,而后創(chuàng)建各種自動駕駛汽車可能會與不同的車輛產(chǎn)生的交通事故(圖 3)。
圖 3:NVIDIA DRIVE Sim 中產(chǎn)生的潛在事故,每個事故都來自對應的真實場景
結論
STRIVE 能夠在仿真中自動創(chuàng)建罕見且危險的潛在事故場景。自動駕駛開發(fā)人員可借助 STRIVE 算法,對自動駕駛系統(tǒng)進行全面訓練和評估,以確保其行為的安全性。
生成車輛之間可能發(fā)生的碰撞場景只是利用 AI 進行交通場景仿真的一個用例。NVIDIA 正著力將數(shù)據(jù)驅(qū)動型模型納入所有類型的交通場景仿真之中,包括行人、自行車騎行者和場景編輯等領域。
NVIDIA DRIVE 相關資源
如需了解更多信息,請查看以下相關資源:
-
STRIVE 項目頁面
:
https://nv-tlabs.github.io/STRIVE/
-
通過學習交通先例生成實用的事故易發(fā)駕駛場景:
https://nv-tlabs.github.io/STRIVE/docs/strive.pdf
-
GitHub 上的 STRIVE 代碼
:
https://github.com/nv-tlabs/STRIVE
-
由 Omniverse 驅(qū)動的 DRIVE Sim 場景重建:
https://www.nvidia.cn/self-driving-cars/simulation/
父親節(jié)互動有禮
你還知道 NVIDIA DRIVE 平臺中有哪些硬件或軟件技術?參與投票并在評論區(qū)留下您的看法,即可參與活動!
活動截止于 6 月 21 日上午 11 點,將抽取 1 位獲贊最高的評論,送出 NVIDIA 定制 T 恤一件!
原文標題:像 “父親” 般為你保駕護航的自動駕駛技術!(互動有禮)
文章出處:【微信公眾號:NVIDIA英偉達】歡迎添加關注!文章轉(zhuǎn)載請注明出處。
-
英偉達
+關注
關注
22文章
3938瀏覽量
93502
原文標題:像 “父親” 般為你保駕護航的自動駕駛技術!(互動有禮)
文章出處:【微信號:NVIDIA_China,微信公眾號:NVIDIA英偉達】歡迎添加關注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
卡車、礦車的自動駕駛和乘用車的自動駕駛在技術要求上有何不同?

技術干貨 | GB/T 45086.1-2024車載定位新國標實施,自動駕駛安全再強化!

充電樁“耐力大考驗”:老化負載研究,為持久續(xù)航保駕護航
安科瑞蓄電池在線監(jiān)控系統(tǒng)為鐵塔基站的穩(wěn)定運行保駕護航
5KP26A 二極管:26V 精準穩(wěn)壓,為電路安全 “保駕護航”
低溫自動加熱型激光雪深傳感器:為交通出行保駕護航
區(qū)域型自動氣象站:為農(nóng)業(yè)生產(chǎn)保駕護航
自動駕駛汽車安全嗎?

工業(yè)專用直流濾波器:為工業(yè)生產(chǎn)保駕護航
自動駕駛技術的典型應用 自動駕駛技術涉及到哪些技術
瑞隆源產(chǎn)品符合性檢驗中心PCIC--為浪涌產(chǎn)品質(zhì)量保駕護航







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論